
高超音速武器因其极端速度与机动规避能力使得防御极具挑战性。本文提出一种仿真框架,旨在研究大气层内使用拦截导弹对抗高超音速武器所面临的技术挑战与系统要求。论文简要描述了由作者开发的高超音速武器、拦截导弹、发射与传感器平台及支持拦截导弹的战术数据链仿真模型。模型参数基于公开可得信息构建。仿真实验结果表明,成功拦截需同时满足数据链目标数据质量、拦截导弹导引头性能与机动能力等要素。最关键的系统要求是拦截导弹末段需具备足够时长,以修正中段累积的制导误差。仿真实验证明该框架亦适用于评估高超音速武器性能。
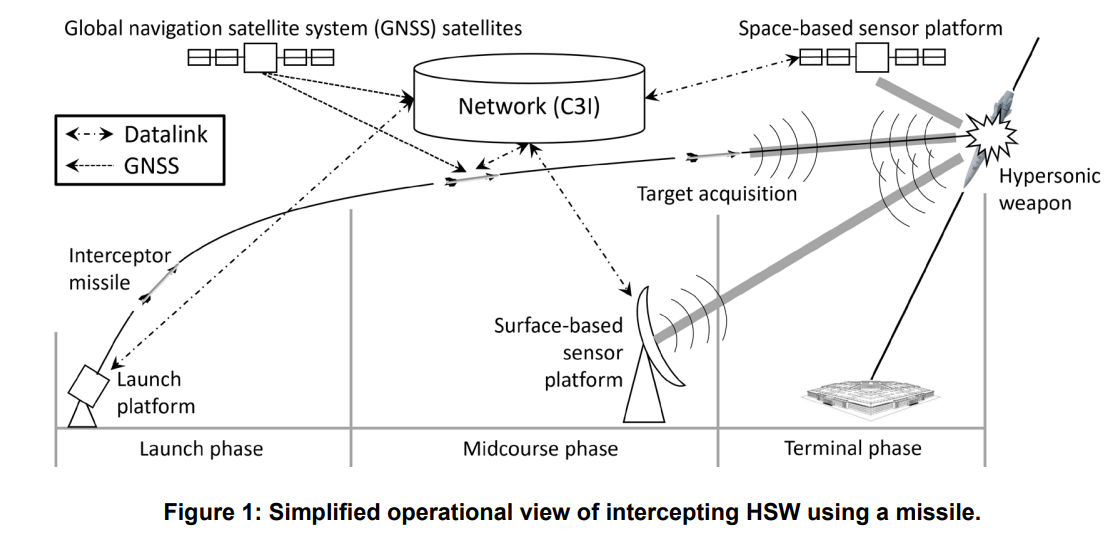
高超音速飞行能力显著提升了武器系统的生存性。由于高超音速武器(HSWs)的极端速度,从探测到打击目标的窗口期极短且拦截困难。此类武器在飞行过程中具备机动规避能力,进一步增加了防御复杂性[1][2]。本文提出一种仿真框架,旨在研究使用拦截导弹(IMs)对抗HSWs的技术挑战与系统要求。该框架包含HSWs、IMs及其支持系统的仿真模型。支持系统涵盖指挥控制通信情报(C3I)系统的组成部分,以及在IMs通过机载传感器(即导引头)捕获目标前持续跟踪HSWs的传感器。所有参与拦截的实体通过C3I系统的战术数据链(TDL)通信。图1所示的简化作战视图展示了各实体及拦截阶段。
HSWs与IMs均采用惯性导航系统(INS)、全球导航卫星系统(GNSS)或嵌入式GNSS-INS(EGI)辅助飞行制导[1][3]。高超音速武器可能配备导引头以最小化脱靶量[3]。与HSW不同,拦截导弹必须配备导引头,因为仅依赖外部数据链目标更新(DLUs)与机载导航系统无法有效对抗高速机动目标[4]。导引头的目标探测能力主要受限于目标距离与视场角(FOR),而拦截导弹的高超音速飞行引发的马赫加热与等离子体效应也会限制导引头功能。
拦截导弹导引头的探测距离(记为RD_IM)受成本、可用空间与电力限制[3]。由于HSW的高速度,多数情况下拦截导弹需在RD_IM范围外发射。此外,HSW飞行中可能实施欺骗性机动规避[1][2]。因此,在进入RD_IM范围并捕获目标前,拦截导弹依赖数据链更新(DLUs)与自身导航系统制导。对跟踪传感器与C3I系统而言,为火控提供满足质量要求的HSW目标DLUs极具挑战性。DLUs质量由目标位置/速度更新误差、更新延迟与数据丢失次数定义[4]。首项质量指标取决于传感器测量能力与C3I系统(含多传感器数据融合功能),后两项指标取决于传输DLUs的战术数据链(TDL)。DLUs延迟分为两部分:传感器处理测量数据并发送至网络的时间,以及数据融合后发送至拦截导弹的时间[3]。数据丢失次数与TDL可靠性相关(需在敌方电磁干扰下保持高可靠性)。
拦截导弹导引头基于雷达、光电红外(EO/IR)传感器或其组合(即多模传感器)。进入预定目标距离后,导引头开始从不确定区域搜索目标[4]。该区域用于补偿DLUs误差、延迟与拦截导弹导航系统误差。雷达导引头需处理位置与速度双重不确定区域,而EO/IR导引头仅搜索垂直于视线方向的位置不确定平面[4]。若导引头在RD_IM范围内探测到目标,拦截导弹转入末段制导阶段。根据现有拦截导弹公开信息,通常需具备直接碰撞杀伤能力[1][2]。即使采用破片战斗部的拦截导弹也需实现极小脱靶量[2]。为简化,本文仿真实验仅考虑直接碰撞杀伤,故未包含近炸引信与战斗部功能等末端事件。拦截导弹与HSW的脱靶距离决定拦截成败。
尽管HSW仿真涵盖从发射到目标的全程飞行,本研究未覆盖从预警至拦截的完整杀伤链,仅聚焦火控系统已跟踪HSW的拦截阶段。研究仅考虑大气层内拦截且未纳入对抗措施。此外,本研究中射频(RF)干扰仅影响拦截导弹接收C3I系统目标数据更新的能力,不影响火控系统或拦截导弹的RF传感器性能。文中讨论了欺骗与干扰导致GNSS定位失效的情况。论文结构如下:第2节简述仿真框架与模型;第3节展示两项仿真实验;第4节讨论总体结果;第5节给出结论。
