
俄乌战争为在传统战场的作战空间开发和测试技术创造了必要条件。考虑到乌克兰在冲突的最初几天就损失了大部分海军力量,因此亟需开发新技术。此外,乌克兰开发的水面和水下技术具有创新性,能够用于进攻行动,这让俄罗斯联邦海军多次出其不意。随着体积更小、重量更轻、价格更低的装备的推出,使用作战车辆变得更加容易和方便。文章对海军无人机(水面水下航行器)的演变以及在黑海地区最近的冲突中如何使用无人机进行了分析。研究的主要目的是确定和介绍促成海军无人机发展的主要水下技术类型,分析在当代冲突中如何使用无人机以及无人机行动的最新演变。研究结论的重点是这些技术的潜在用途,以及在各类武装冲突中如何与其他作战技术结合使用。
海事无人机发展概述
海军无人机彻底改变了海洋研究。在过去 20 年里,无人机发生了巨大变化,从用于海洋学术研究的笨重、昂贵的设备变成了用于各种理论和应用领域(包括军事和商业领域)的多功能工具。因此,这些设备现在对负载能力、处理能力、自主性和声学有了更高的要求。因此,经济性和适应性至关重要。
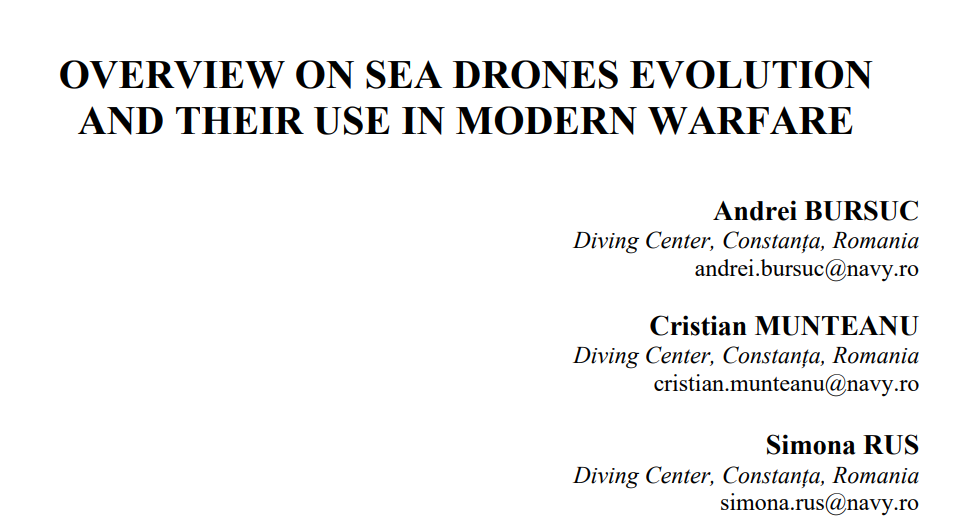
1957 年,美国华盛顿大学的 “应用物理实验室 ”制造出第一台设备,基本上可归类为海上无人机。它被命名为 SPURV(特殊用途水下研究船,有时缩写为 “SPURV”),用于调查北极水域(Roberts & Sutton, 2022)。SPURV 的铝制车身形状类似鱼雷。SPURV 由螺旋桨推进,采用传统的流体力学设计。这种水下无人机由音频通信控制。直到 1979 年,SPURV 一直被有效地用于海洋学研究,现在它已被公认为是一种可靠和有用的海洋勘探工具。
随着技术的进步,无人机的潜在应用范围也在不断扩大。1983 年,在国防部和加拿大水文局的支持下,“ISE 有限公司 ”创建了 “ARCS”。它于 1987 年首次执行任务。该设备使用 32 位摩托罗拉 CPU,其功能允许用户根据任务在水下停留长达 35 小时,并实时观察和控制海洋无人机。新的无人机技术,如基于算法的任务、新的导航系统和新的电池种类,都已在 ARCS 上成功测试。
20 世纪 90 年代末,俄罗斯海洋技术问题研究所的专家们对在水面海洋无人机上安装太阳能电池板的前景产生了浓厚的兴趣。“SAUV “是 ”太阳能自主飞行器 “的缩写,是与 ”AUSI"(自主水下系统研究所)合作开发的这一概念的名称。SAUV 成立于 1998 年。随后,AUSI 的研究人员根据他们建造类似飞行器的专业知识,开发了 SAUV II 太阳能无人机(Gettinger,2018 年)。该飞行器能够在数周或数月内完成任务,是因为其上安装了太阳能电池板,可持续为电池充电。SAUV 可装载大量传感器和设备,可使用全球定位系统导航,并可行驶 8 小时而无需为电池充电。
1994 年,麻省理工学院的学生率先开发了 “金枪鱼 ”项目,这是一个模仿金枪鱼的水下机器人。此外,他们创造的 “RoboPike ”具有灵活的身体和类似于传统海洋无人机的功能特点。除了科学仿生(游泳)AUV 外,还开发了 “Ariel II”、“RoboLobster ”和其他 “爬行 ”型仿生海洋无人机。它们有类似螃蟹和龙虾的钳子,可以在水中穿行。
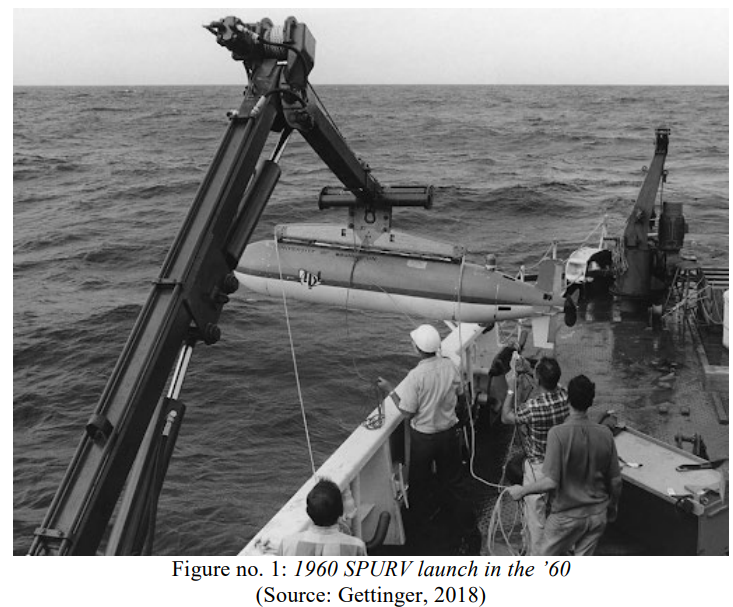
最近还制造出了配备鳍的仿生海洋无人机(“AQUA2 ”项目和其他项目)。AQUA2 是一个支持珊瑚礁、海底和浅海环境监测的功能性机器人。它有四个坚固的聚合物鳍,除了能在水下行走外,还能在沙地或雪地上行走。由于有四个鳍,AQUA2 的机动性远远超过传统的无人机。
因此,制造海上无人机并不是一项相对较新的工作。从模拟研究到商业化,从技术角度来看,从单架海上无人机的建模到众多无人机的协同控制,下文简要介绍了可追溯到 20 世纪 70 年代的无人机概念:
-
1970 年之前。无人机的初步发展--早在 20 世纪 60 年代就研制出了第一批无人机,用于数据收集和传输。
-
1970-1980. 探索无人机的潜力--20 世纪 70 年代,美国研制出第一批真正意义上的无人机,称为 “鱼雷”,用于测试目的。这一时期进行了许多成功(和失败)的实验,除此之外,这十年也是大多数海渠理论和实验工作的基础。
-
1980-1990. 原型实验 - 这一时期是海上无人机按时间顺序发展史上的黄金时期,因为大多数理论发展都在实际领域得以实施(为此制造了试验台)。在此期间,DARPA 实验室在美国开发了大部分原型机(Wernli, 2022 年)。
-
1990-2000. 开发技术以实现目标--在这十年中,开发出了第一代能够执行实验任务的海上无人机。一些组织能够根据自己的目标开发无人机,这十年使水下海洋飞行器实现了商业化。
-
2000-2010. 海上无人机的商业化和协同运动控制技术的发展--这是海上无人机研究和技术从学术层面走向工业层面的十年。在此期间,许多公司能够根据市场需求开发无人机,这也是无人机技术在实际领域的正确应用。多架无人机协同运动控制的理论发展也是在这十年间完成的。
海军无人机在现代战争中的作用
为了确定未来海上作战空间的关键要素,由于武器和传感器技术的最新发展,海军作战趋势已被重新定义。
通过更好的信息内容、平台实施和流程开发,促进更有效的信息收集、处理、评估和利用,从而高度提高态势感知能力,是本项目的首要要求。这部分是因为作战决策的质量,特别是那些能使海军更有效地协调对敌军的观察、瞄准和交战行动的决策质量,将比海上力量的威力更能决定未来的作战环境。
尽管对未来海洋环境的研究强调了军事能力变化的不同方面,但所有这些研究都承认,海上部队越来越有可能在有争议的环境中部署网络系统和高精度制导武器(Ura,2021 年)。我们似乎有理由预计,未来,即使海上作战空间确实在压缩,海军部队的水面机动自由受到严重限制,远程传感器和精确攻击能力的使用仍将大幅增长。
实证研究表明,后现代海上作战可能包含需要使用遥感和测距能力的作战思想。分析家预测,在和平与战争期间,无人驾驶和自主系统将在其中几个领域发挥关键作用,包括侦察行动、网络中心战、特种作战和濒海战斗。
许多观察家认为,自主系统是未来海洋环境最重要的方面。综合决策和人工智能(AI)系统是一种革命性的、具有潜在破坏性的能力,可以突破入侵性海上任务的界限,在海事界创造一种新常态。这些系统能够在不危及己方部队或舰载系统完整性的情况下,在敌方反介入/区域拒止区内执行作战行动,这正是其与众不同之处。但是,使这些系统有别于其他平台的可能是它们能够以数量优势压倒目标系统和传感器,从而大大降低敌方的战斗力。
现代舰队使用先进的水下无人机执行反潜战(ASW)、水雷对抗(MCM)、海军情报、监视和侦察(ISR)任务。尽管无人潜航器(UUV)仍相对较新,但其使用范围正在迅速扩大,特别是在中国南海和霍尔木兹海峡等地区,这正在改变舰队对濒海作战的看法(Button、Kamp、Curtin & Dryden,2009 年)。
当今的 UUV 大致可分为遥控水下航行器(ROV)和自主水下航行器(AUV)。自动潜航器与遥控潜水器的不同之处在于,尽管由于技术的快速发展,这两种平台之间的许多区别已变得不那么明显,但自动潜航器仍保留了一定的自主性,不受人类控制。海上无人机的主要能力是执行反潜作战,而反潜作战通常是由核动力攻击潜艇来执行的,因为核动力攻击潜艇的装备更好,可以执行更重要的任务。为实现对潜艇的持续跟踪,这些平台配备了被动声纳式装置。
这些平台执行标准水下作业的能力可能会最终决定无人和自主水下技术的发展方向。近年来,关于自主航行器是否有能力执行全频谱潜艇行动的猜测确实很多。事实上,即使这种估计仍然纯粹是理论性的,但它的概念化提出了一些引人入胜的可能性。现代潜艇需要大量的资金和技术投入来维持秘密状态,这降低了指挥官在敌对水域执行前沿作战的意愿。如果水下平台能取代潜艇的作用,海军在敌对水域的冒险精神可能会大大增强。
因此,世界主要海军--美国、俄罗斯、英国和中国--都在积极打造用于前沿作战的水下平台,这一点不足为奇。莫斯科在 2022 年宣布,它正在创建一个无人水面和水下飞行器家族,能够在俄罗斯领海内猎杀美国潜艇。另据报道,俄罗斯海军正在开发系留无人机,以便在极深的海底执行复杂的任务。据报道,美国海军正在开发类似工具,以应对俄罗斯潜艇在大西洋的行动。五角大楼在 2021 年 1 月向美国国会提交的一份报告中详细介绍了建立水下平台、传感器和充电站网络的计划。
监视和研究--海洋领域凸显了对持久性 ISR 行动的需求。其意义不仅在于获取情报这一传统原因,还在于它是更多无人机任务和用途的先驱和推动者。就无人机而言,ISR 任务的目标是收集情报,同时保持低调。这包括收集有关电磁、光学和航空样本、天气、声学信号、水样、海底监测设备和物体位置的数据(Ahmed,2023 年)。濒海区域 ISR、港口监测、化学、生物、核与辐射(CBRN)探测与定位、监视传感器的布置、战损评估、主动目标识别以及其他特定的 UUV ISR 功能都是可用的众多功能之一。
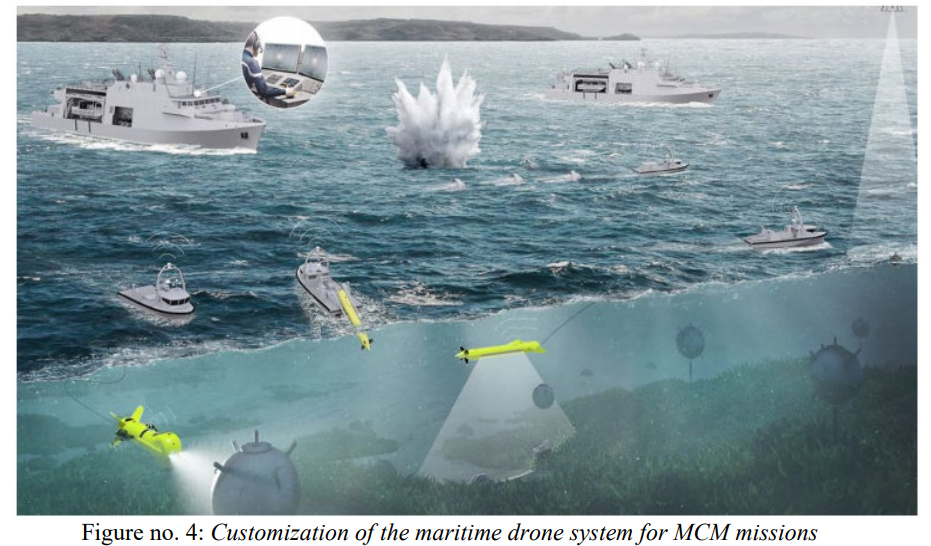
反雷(MCM)--必须迅速建立广阔而安全的作战区域、路线和运输通道,这是 MCM 任务的要求。根据规定,指定区域内的所有 MCM 行动必须在 7 到 10 天内完成,但显然越快越好。这种 MCM 能力旨在减少 MCM 延误,同时确定或创建无水雷作业区,而无需人类平台进入疑似雷区。
在海上无人机必须完成的任务中,MCM 可以说是最困难的。由于水雷种类繁多、容易接近可能的敌人、在各种深度下使用简单以及水雷监测行动的零容忍性质,水雷监测任务被认为是最难的任务。由于所面临的与地雷有关的风险多种多样,因此,在作战环境中,各种类型的拆船和装卸任务都能满足这些要求。其中包括
- 侦察--探测、分类、识别和定位;
- 清除--失效;
- 激活--机械和影响;
- 保护--干扰和阻断(Mondal、Banerjee 和 Panja,2021 年)。
就近期而言,猎雷和中和特定 MCM 功能适合采用无人机特定解决方案。可以将探测、分类、识别和消除阶段分离出来。
ISR 和海洋学任务有利于 MCM。无人机可收集有关风、水深、海水能见度、海流、海浪、地球物理参数、藻类浓度、沙坝和其他因素的海洋学数据,这些数据可能会在敌对行动之前改变与水雷的接触。
有效载荷运送--虽然有效载荷运送本身并不是一项任务,但它是为其他几个任务领域提供动力、自主性、导航能力和有效载荷部署系统所必需的。大型无人机可以在不暴露关键平台的情况下提供隐蔽的支持和补给,从而帮助后勤工作。可能的有效载荷包括
用于支持 ISR、ASW 支持 ISR、ASW、MCM 的传感器或飞行器;
- 海洋学、CN3 或 TCS;
- 部署武器;
- 特种部队或爆炸物处理 任务;
- MCM 中和装置;
- 作为潜水员 运载平台(Galushko,2023 年)。
兵力保护--反潜战使用海上无人机巡逻、识别、跟踪和摧毁敌方潜艇。反潜战任务历来都是劳动密集型的,需要具备不同程度传感器专业知识的人员收集大量数据,例如从浮标或拖曳声纳收集数据。从这些数据中可以获得相关信息,从而对目标或风险进行潜在评估。最近,还提出了其他反潜战战略,涉及分散的移动和固定传感器,如无人机。广义上讲,反舰导弹作战有以下三种类型:
- 按兵不动"--监视所有离开港口或通过狭窄地点的潜艇;
- 海上盾牌--检查和维护大型海上力量的行动区域,使其不受潜艇威胁;
- 受保护通道--核查和维护海上部队从一个行动区到另一个行动区的路线,防止潜艇受到威胁(Mondal、Banerjee 和 Panja,2021 年)。

