
无人驾驶飞行器(UAV)或无人机的航空电子系统是机载的关键电子元件,用于调节、导航和控制无人驾驶飞行器的飞行,同时确保公共安全。当代无人飞行器航空电子设备通过实现稳定的通信、安全的识别协议、新颖的能源解决方案、多传感器精确感知和自主导航、精确的路径规划(确保避免碰撞)、可靠的轨迹控制以及无人飞行器系统内高效的数据传输,共同促进无人飞行器任务的成功。此外,还必须特别考虑电子战威胁的预防、检测和缓解,以及与无人机操作相关的监管框架。本综述介绍了每种无人机航电系统的作用和分类,同时涵盖了每种系统中可用替代品的缺点和优点。对无人机通信系统、天线和定位通信跟踪进行了调查。介绍响应空对空或空对地询问信号的识别系统。讨论了无人机的经典动力源和更多创新动力源。感知系统的快速发展提高了无人机的自主导航和控制能力。论文回顾了常见的感知系统、导航技术、路径规划方法、避障方法和跟踪控制。现代电子战采用了先进的技术,必须以同样先进的方法来应对,以确保公众安全。因此,本作品详细介绍了常见的电子战威胁以及最先进的应对措施和防御辅助手段。此外,还结合国家监管框架和认证程序分析了无人机安全事件。最后,对无人飞行器的数据总线通信和标准进行了审查,因为它们能够实现高效、快速的实时数据传输。
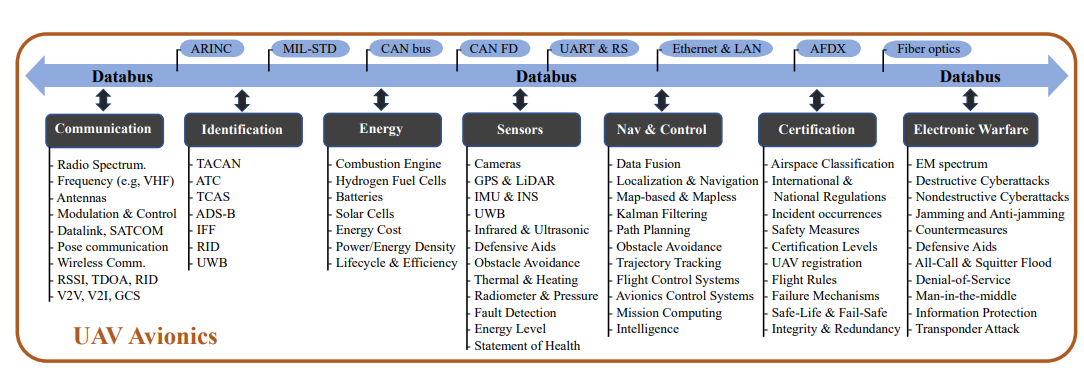
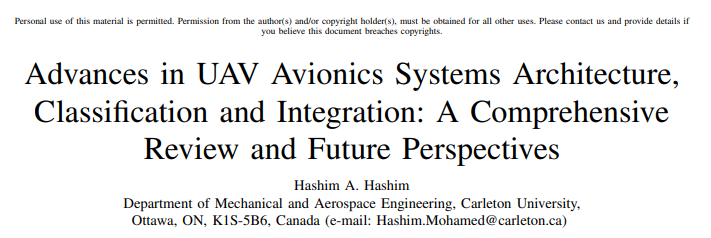
图 1:无人机航空电子元件示意图。
范围: 本综述论文的中心目标是向无人机研究界全面介绍无人机航空电子系统的结构和分类,包括每种分类法的主要特征。这项工作涵盖了无人机通信系统、持续存在的挑战、常见的战争威胁和相应的防御策略。无人机的另一个关键部件是其动力源,因此本文介绍了不同的能源、能量密度、功率密度及其相关挑战。此外,本文还介绍了无人机中使用的典型识别系统及其在通信系统、避障和电子战中各自的作用。论文概述了感知传感器、传感器融合在构建导航状态中的作用、依赖机载传感器的导航(有无外部通信)以及导航状态估计。论文还介绍了路径规划技术分类、避免碰撞的常用方法以及轨迹技术的不同控制方法。最后,还讨论了无人机法规、安全协议、空域分类以及操作员执行无人机任务所需的认证程序。图 1 提供了无人机航空电子设备组件的概念图。
结构: 本文其余部分分为九节。第二节介绍通信控制系统、无人机天线、无人机位置通信(位置和方向)以及无人机辅助无线通信。第三节讨论无人机识别系统。第四节总结了无人机使用的不同类型的能源系统。第五节讨论无人机感知和导航系统,包括传感器融合、基于地图和无地图方法以及估计器设计。第六节介绍路径规划、避障和轨迹跟踪。第七节概述无人机电子战,包括破坏性和非破坏性网络攻击、攻击转发器、干扰和反干扰,以及反制和防御措施。
实际上,无人机任务的成功有赖于与地面的无线通信。无人机无线通信包括传感器通信(如定位)、实时图像和视频馈送、与地面基站之间的信息往来、与蜂窝网络和卫星的连接,以及与其他空中/地面飞行器之间的协作,其中通信联系是通过指令建立的。本节回顾了无人机通信系统、天线、定位跟踪以及将无人机用作辅助通信系统。图 2 展示了无人机通信系统的示意图,包括有线和无线通信链路、车对车、车对基础设施以及车对人操作员。
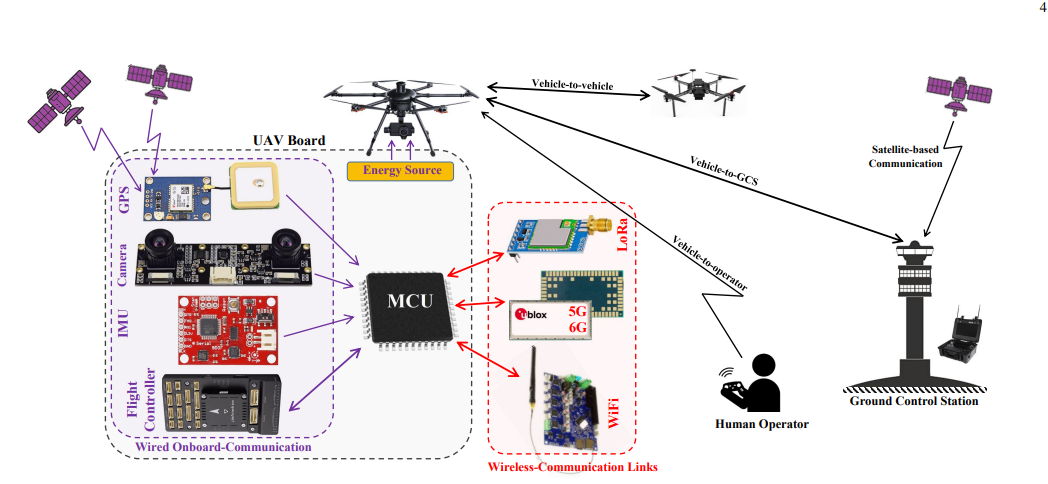
图 2:无人机通信系统: 有线、无线、车对车、车对基础设施和车对操作员。
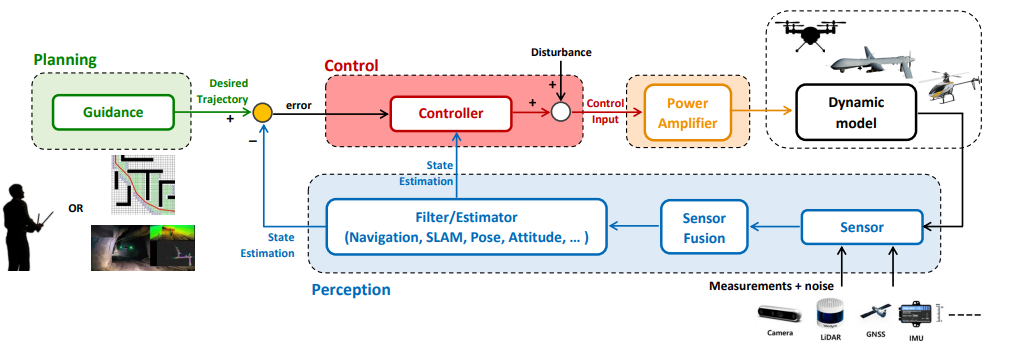
图 4:感知、运动规划和控制概念图
无人机导航是一个自我定位的过程,有助于无人机规划如何安全、快速地从当前位置前往目标目的地(运动规划和控制)。要成功完成导航任务,无人机必须能够获得自己在三维空间中的位置、航向角和导航速度,也就是通常所说的无人机运动状态(由姿态组成,通常称为方位、位置和线速度)。最早的导航方法包括引航、天体导航和惯性导航。引航法利用可视的自然和人造地标(如城镇、河流、灯塔或浮标)来确定飞行器的位置。天体导航依靠太阳、月亮、星星和行星来确定位置。惯性导航是一种惯性导航方法,它根据最后已知位置计算车辆当前位置,并根据已知或估计线速度(利用位置信息进行整合)在经过的时间和路线上前进。现代导航技术已经取得了长足进步,无人飞行器通常依靠全球导航卫星系统和卫星通信进行路由选择(确定其位置)。最先进的无人机导航技术包括:卫星导航、惯性导航和基于视觉的惯性导航。有些方法被用作主要导航技术,而其他方法则被用作备用解决方案。安全完成无人机任务至关重要,因此,同时采用多种导航技术可确保在所有行驶条件下都能获得可靠的导航数据。
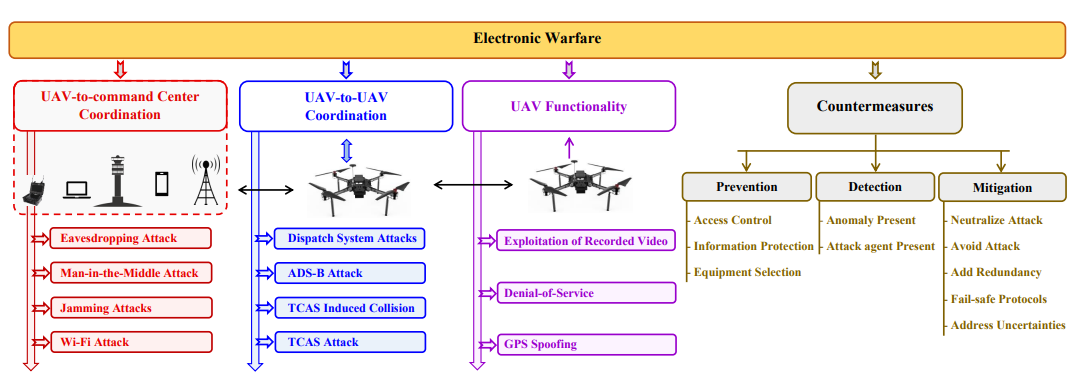
图 7:无人机电子战攻击和反制措施分类。
长期以来,对手一直在研究战争,以评估对手的强项和弱点,从而最大限度地降低风险。战场上的关键因素包括:军事规划,确保战场上和参谋总部所有部队之间的通信;防空,利用雷达探测来袭空中威胁并处理通过固定电话或数据链收到的情报;空中优势飞机,利用快速反应警报干扰或减缓敌方空中巡逻;防御压制,利用雷达进行地形跟踪和目标捕捉;进攻行动,依靠雷达定位目标并引导导弹。电磁(EM)频谱与定向能一起构成了电子战的基本组成部分。因此,电子战可定义为一门科学,既要维持友方对电磁频谱的使用,又要阻止敌方使用。具体来说,电子战旨在控制电磁频谱,有可能干扰或阻断敌方雷达信号和数据通信,从而使其系统无法工作。研究界正在积极开发先进的战略和技术,利用电磁频谱保护友方无人机免受敌方威胁,同时干扰或消除敌方无人机的行动。数字操作航空器的快速发展进一步将网络攻击定位为电子战中的一个重要领域。针对无人机的常见电子战网络攻击威胁可分为三个主要领域: 无人机与指挥中心之间的协调、无人机与无人机之间的协调以及无人机的功能。无人机与指挥中心之间的协调威胁包括窃听攻击、中间人(MITM)攻击、干扰攻击和基于 Wi-Fi 的攻击。无人机与无人机之间的协调威胁包括调度系统攻击、ADS-B(自动监视广播)攻击、TCAS(交通防撞系统)诱发的碰撞以及 TCAS 特有的攻击。无人机功能威胁通常集中在利用录制的视频馈送、拒绝服务(DoS)攻击和 GPS 欺骗。针对这些威胁的对策分为三类:预防、检测和缓解。预防对策包括访问控制、信息保护和谨慎选择设备等措施。检测对策依赖于识别异常或检测攻击智能体的存在。缓解对策包括中和或避免攻击、增加冗余、实施故障安全协议和解决不确定性。图 7 展示了这些常见无人机网络攻击威胁和应对措施的分类。
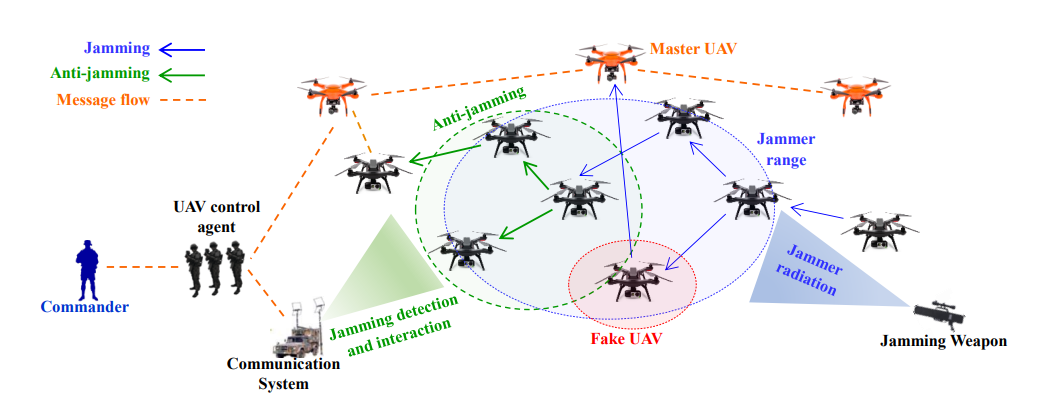
图 8:电子战中的无人机,说明欺骗、MITM、干扰攻击和反干扰反应。
破坏性网络攻击方法侧重于开放系统互连(OSI)的低层,主要针对使用多个系统和机械系统所必需的单个硬件元件。此外,破坏性网络攻击可以集中在使无人机电池系统过热上。无人机严重依赖无线通信,因此,无人机最常见的电子战威胁包括服务中断、劫持、数据完整性破坏和远程代码执行[124]。此外,全球控制系统也可能成为电子战的攻击目标。图 8 展示了多种电子战攻击技术和抗干扰缓解措施。此外,恶意软件也是一种危险的电子战工具。恶意软件是一种旨在造成破坏的软件,可通过网络组群传播或从全球控制系统到达,感染一架或多架无人机,从而达到控制无人机的目的。另一种常见的破坏性威胁是硬件木马,主要是对飞行控制器电路进行硬件级恶意修改。构成飞行控制器的底层系统非常复杂,因此木马病毒也很常用。将仿制硬件引入供应链会造成电路本身的安全漏洞,导致组件永久性失效,并可能导致无人机毁坏。

