
一只游隼在空中追逐鸽子的行为为无人机自主系统、飞行控制、抓取、栖落以及无舵变形飞行系统设计提供了极具说服力的灵感来源,这得益于游隼的多功能能力。高机动自主无人机DESI项目涉及斯坦福大学两个实验室(Lentink和Cutkosky)及其行业合作伙伴(Skydio)之间的密切合作,旨在开发能够在湍流中实现无舵变形飞行、在树枝等复杂表面栖落以及捕获飞行中空中目标(如小型无人机)的飞行器。为了将游隼的能力转化到无人机领域,在两年合作研发期间,将仿生机器人多功能结构与自主追踪研究的重点放在了四个关键挑战上。首先,开发了“定型自然启发空中抓取器”(SNAG),这是一个安装在四旋翼飞行器上的机器人腿部和末端执行器,能够栖落在覆盖泥土、苔藓和地衣的多种树枝上,并能动态抓取物体。其次,开发了首款无舵变形飞行器“鸽子机器人2号”(PigeonBot 2),这是一种生物混合的无舵变形飞行器,具有欠驱动的软质羽毛翼和尾翼。它不仅揭示了此前未知的无舵变形飞行原理,还在风洞的高湍流环境和广泛的室外自主飞行测试中验证了这些原理。接着,专注于实现四旋翼飞行器的飞行中动态抓取,使其能够抓取飞行中的目标无人机,并从触发抓取的碰撞中恢复稳定。最后,展示了一种集成在自主Skydio X2平台上的空中抓取机制。随后利用Skydio基于视觉的自主引擎来测试飞行中的抓取目标。这项工作启发开发了一种轨迹生成器,它将微分平坦性与轨迹优化相结合,以更直接、更快速地满足状态约束。通过这四项主要的合作成果,展示了DESI项目的基本成果如何普遍推动开发更多功能、更鲁棒的飞行器。
项目成果概述
该项目涉及斯坦福大学两个实验室(Lentink和Cutkosky)与工业界(Skydio)的密切合作,以开发敏捷的无舵变形飞行器,演示在树枝等复杂表面栖落以及捕获飞行中的机动空中目标(小型无人机)。该团队的四项主要成果和四个飞行演示器包括:
-
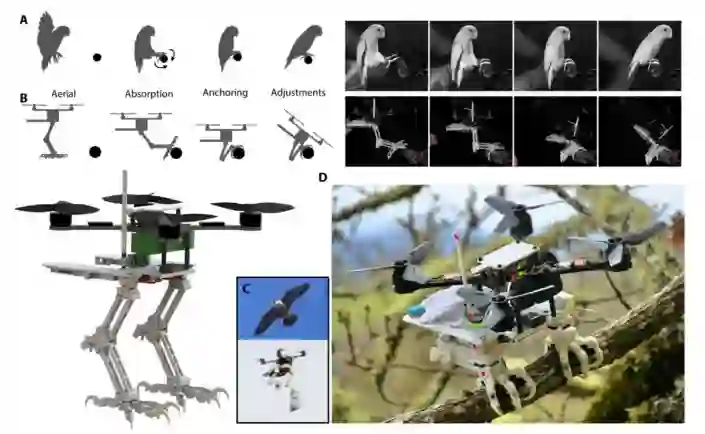
定型化自然启发空中抓取器(SNAG):受鸟类启发的定型化栖落技术,实现在复杂表面(包括覆盖泥土、地衣和苔藓的真实树枝)的栖落,并能动态抓取复杂物体。
-
无舵变形飞行器(PigeonBot 2):首架“无舵变形飞行器”,具备由分层软表面构成的欠驱动变形机翼和尾翼,并在高湍流环境下展现出鲁棒的飞行控制能力。
-
空中无人机抓取器:能够抓取飞行中的小型空中无人机,并在撞击后恢复飞行控制;其利用轻量级抓取器,借助碰撞能量牢固抓握无人机。
-
集成自主平台:该协作平台将自主飞行器Skydio X2与斯坦福抓取器相集成,通过基于视觉的自主技术实现对空中小型无人机的抓取操作。


