
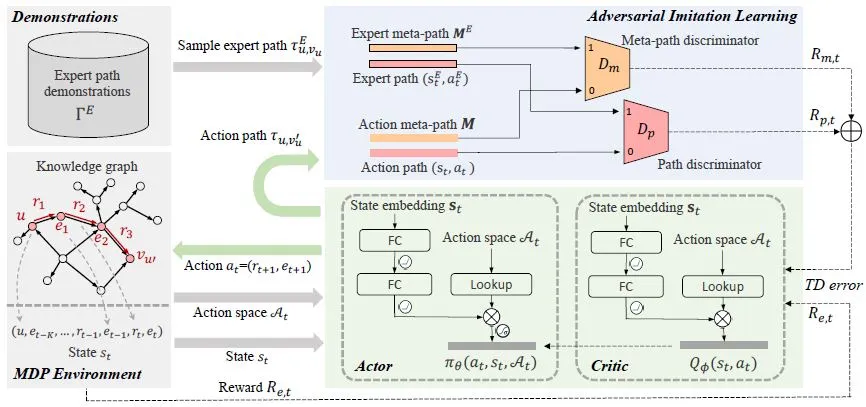
知识图谱被广泛用于提高推荐准确度。知识图谱上的多跳用户-物品连接还提供了关于为什么推荐某个项的推理。然而,路径推理是一个复杂的组合优化问题。传统的推荐方法通常采用蛮力方法来寻找可行路径,这导致了与可解释性和收敛性相关的问题。在本文中,我们通过更好地监督寻路过程来解决这些问题。关键思想是用最小的标记努力提取不完美的路径演示,并有效地利用这些演示来指导寻路。特别地,我们设计了一个基于演示的知识图推理框架用于可解释推荐。我们还提出了一个反面的actor批评家(ADAC)模型用于演示导向的寻路。在三个真实基准上的实验表明,我们的方法比最先进的基准更快地收敛,并且具有更好的推荐精度和可解释性。
成为VIP会员查看完整内容
相关内容

知识图谱(Knowledge Graph),在图书情报界称为知识域可视化或知识领域映射地图,是显示知识发展进程与结构关系的一系列各种不同的图形,用可视化技术描述知识资源及其载体,挖掘、分析、构建、绘制和显示知识及它们之间的相互联系。
知识图谱是通过将应用数学、图形学、信息可视化技术、信息科学等学科的理论与方法与计量学引文分析、共现分析等方法结合,并利用可视化的图谱形象地展示学科的核心结构、发展历史、前沿领域以及整体知识架构达到多学科融合目的的现代理论。它能为学科研究提供切实的、有价值的参考。
Arxiv
5+阅读 · 2020年4月2日
Arxiv
11+阅读 · 2018年5月9日
相关VIP内容
相关资讯