
本文设计并验证了一种用于高效开发多机器人海洋任务的新型模拟器。为了加快合作行为的开发,该模拟器以中等高保真度模拟机器人的工作条件,运行速度明显快于实时速度,包括声学通信、动态环境数据和大型世界中的高分辨率测深。该模拟器的实时系数(RTF)超过 100,这一点已通过强大的持续集成套件进行了测试,并被用于开发多机器人现场实验。
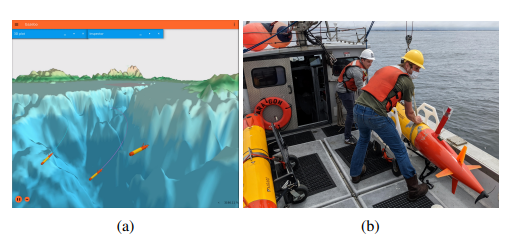
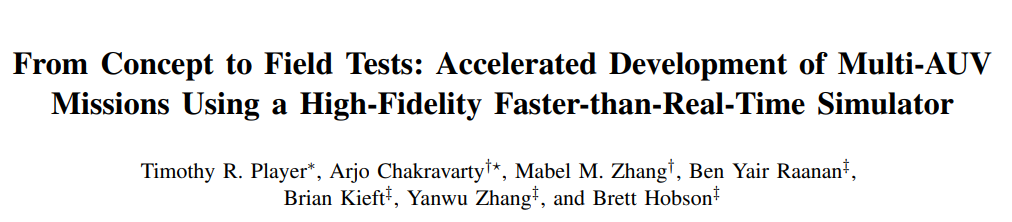
图 1: (a) 多车模拟。(b) 在蒙特雷湾从 R/V Paragon 上实地部署的 LRAUV
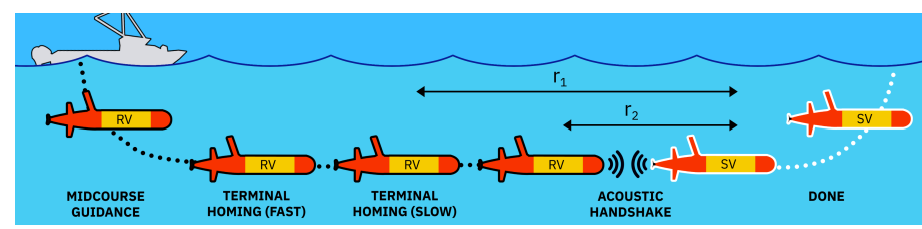
图 4:热掩体任务阶段。部署完成后,救生飞行器(RV)开始向漂移的采样飞行器(SV)进行三阶段归航:在中途制导过程中到达 GPS 航点后,RV 切换到声学终端归航阶段,速度很快,然后在距离减小到 r1 时减速。一旦距离达到 r2,就会发生双向声学握手,RV 命令 SV 浮出水面,SV 则确认命令并浮出水面。在 "完成 "阶段,RV 开始采样。
自主机器人是现代海洋勘探的主流。与传统的船舶作业相比,机器人收集的现场测量数据尺度更大、精度更高、成本更低。此外,与单个自主潜水器(AUV)相比,长时间部署的多机器人系统能更有效地收集更大规模的数据[1], [2], [3]。然而,复杂的水下多机器人系统需要在模拟和现场进行严格验证才能可靠运行。
开发长时间的多潜航器任务具有挑战性,因为许多故障模式可能会危及为期一周或一个月的部署的成功。水下平台必须在通信受限、电力紧张和定位不确定的情况下可靠运行。故障可能导致昂贵的有效载荷和数据丢失。多个智能体的故障点越多,风险就越大。仿真技术发挥着关键作用,它允许在高风险部署前对代码进行测试。然而,现有的模拟器速度太慢,或者不支持多车辆。
我们设计了一个模拟堆栈 LRAUV Sim,用于开发复杂的多无人飞行器任务。该模拟器可以扩展到任意螺旋桨驱动的水下航行器,但目前模拟的是长距离自主水下航行器(LRAUV),这是一种细长型 AUV,在现实世界中经常由两个机构部署。LRAUV Sim 扩展了新的 Gazebo 模拟器[4],并以我们认为比以前的模拟器更快的速度模拟了流体力学、声学通信和海洋传感器,同时允许从用户提供的标量场可视化科学数据。LRAUV Sim 为野外机器人技术提供了一种开发模式,可以快速模拟多个动作序列,以测试复杂系统中的故障情况和任务逻辑。
虽然任务开发仍需要真实世界的验证,但快速模拟各种场景的能力可让从业人员在现场集中时间对任务进行微调,以考虑到模拟中未完全建模的因素,如微妙的流体力学行为以及传感器和执行器特性,而不是在现场发现任务逻辑或控制流中的软件错误。
我们通过持续集成(CI)测试验证了模拟器,并从模拟到成功的现场试验,开发了一种复杂的行为,以维持多机器人团队的观测。在这一行为中,一个自动潜航器利用声学定位和通信技术精确地替换另一个自动潜航器,使被替换的潜航器能够重新充电或重新调度:这是一种与海洋研究人员相关的监测技术。
贡献如下
-
多机器人快于实时(FTRT)海洋模拟,具有我们所知的最快 RTF
-
基于坚实理论基础的流体力学验证的连续控制器集成
-
物理模拟时间步长与黑盒控制器迭代同步
-
在现实世界中演示模拟加速任务开发和验证
-
模拟器内可视化大规模密集数据,包括动态插值科学数据和高分辨率真实世界水深测量数据
-
软件贡献被接受为通用模拟器(新的 Gazebo [4])的本地内置功能
