
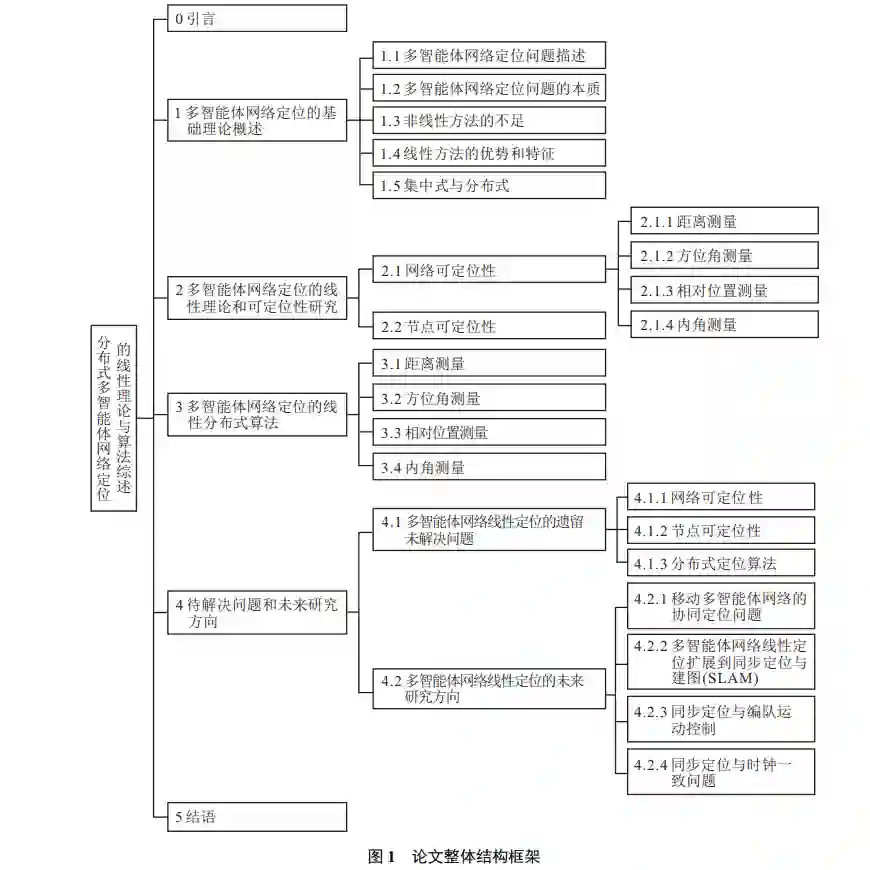
多智能体网络定位在智慧物流、工厂监控、无人系统集群等领域具有广阔的应用,然而网络中节点测量量相对于节点位置的非线性本质给定位问题带来了巨大的挑战.鉴于此,对分布式多智能体网络定位问题进行综述.首先通过比较分析非线性定位方法与线性定位方法以及集中式定位方法与分布式定位方法,凸显了分布式线性定位方法的明显优势;然后从可定位性的判定条件与线性定位算法两个方面对目前已有的相关成果进行梳理与综述,其中包括距离、方位角、相对位置以及内角等4种测量量下的相关结果;最后总结目前尚未解决的难题以及未来的研究方向. 本文围绕分布式多智能体网络定位的线性理论与算法展开综述, 主要从多智能体网络定位的问题描述、线性理论和可定位性研究、线性分布式算法、待解决的问题以及未来扩展研究方向4个方面进行详细介绍.着重探讨基于距离测量、方位角测量、相对位置测量以及内角测量的多智能体网络可定位性和线性分布式定位算法, 试图给出多智能体网络线性定位理论和方法的完整框架与最新进展.论文整体结构如图 1所示.
成为VIP会员查看完整内容
相关内容
Arxiv
42+阅读 · 2023年4月19日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
153+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
153+阅读 · 2023年3月29日