
要优化人类与有人驾驶和无人驾驶战车组成的异质团队的协同工作效果,就必须了解关键任务所需的通信和协调。这些知识可用于指导这些互动的人体工学界面设计,以及团队合作效果的评估方法。该项目系统地研究了下一代战车(NCGV)概念所涉及的任务,以制定人类-自主团队互动分类法,并确定适用于该环境的初步措施。
最终目标是开发能够衡量 NGCV 环境下人类-自主团队合作有效性的指标和模型。由于无法使用实际运行中的机器人战车(RCV)或现有经验丰富的机器人战车乘员,我们的方法可细分为工作说明书中的三项任务和嵌入式可交付成果:
-
任务 1(第 2 节)介绍了 NGCV 的背景以及在从移动到接触行动期间的相关互动。
-
任务 2(第 3 节)为装甲排的核心基线任务和潜在的交互策略制定交互分类法,特别是根据相关文献和有关作战车辆以往经验的主题访谈为 RCV 操作员的任务制定交互分类法。
-
任务 3(第 4 节)以任务 1 和任务 2 为基础,提出了一个全面的团队合作有效性模型,并建议了团队层面的团队合作有效性衡量标准,重点关注团队状态,包括团队态势感知、团队信任、团队工作量和团队应变能力。这些衡量标准也为以后的实证测试提供了测试平台要求。许多想法都很新颖,有别于传统的团队合作有效性静态和二元测量方法。它们的优缺点也包括在内。
未来,这些已确定的基于互动的衡量标准需要在涉及人类、自主性和互动的团队任务中进行实证测试。然后,我们的目标是构建和定义衡量标准,并找出在人类-自主团队合作背景下定义团队效率的衡量标准之间的背景变化和相互关系。
随着人工智能和机器学习技术的进步,技术越来越能够成为团队的正式成员,而不是监督或控制设备。未来的士兵不仅要与同伴互动,还要与多种形式的机器人(包括下一代战车 [NGCV])、智能辅助决策系统以及能感知其当前生理状态的可穿戴设备互动。有人驾驶车辆需要与无人驾驶车辆互动。挑战在于如何让这些异构和分布式智能体作为一个有效的团队进行互动,同时管理工作量并保持团队的态势感知(SA)、恢复力和信任。为应对这一挑战,本文介绍的研究重点是确定新颖的人类-智能体交互模型、措施以及人类-智能体团队合作有效性的衡量标准。
1.1 人类-自主性编队协同(HAT)
最近,包括军事团队在内的团队已扩展到包括智能人工体(Burke 等人,2004 年;Salas 等人,2008 年)。智能体被定义为 "任何可通过传感器感知环境并通过效应器对环境采取行动的物体"(Russell 和 Norvig,2016 年,第 34 页)。这也包括非人类(即人工)实体,如机器人、车辆和车辆中的其他自动化系统。人类-自动驾驶团队指的是由人类和智能体共同组成的团队,他们相互依存地行动,以实现团队层面的目标。与传统的全人类团队相比,当协调行动能更安全、更高效地完成任务,或达到全人类团队以前无法达到的更高绩效水平时,这些人类-自主团队可能更受青睐。例如,在倒塌的建筑物中穿行对于人类来说可能是危险、困难或不可能的,但对于城市搜救行动来说却是至关重要的(Burke 等人,2004 年)。
未来的自主战车可能会利用多种控制结构与其他智能体进行协调。现有的一些人机交互控制模型包括远程操作、监督控制(Sheridan,2002 年)以及各种共享控制模型(Allen 等,1999 年;Chen 和 Barnes,2014 年;Johnson 等,2014 年)。每种模式都涉及实现能力各异的多个人类和智能体之间有效协调的基本策略。在战场上,任何个体都不可能完全了解局势。相反,需要积极整合不同的视角来协调努力,实现集体目标。团队层面的认知过程,如计划、推理、决策和行动(即团队认知)都需要团队互动(Cooke 等人,2013 年)。在开发 NGCV 以支持有效的 HAT 设计时,需要对团队互动和协调测量进行研究。
1.2 下一代战车(NGCV)的背景
NGCV 是未来军用车辆的一个系列,旨在利用现代技术发展移动防护火力,保护士兵的生命安全。在 NGCV 中,团队组成可能会有所不同,例如乘员人数和作战车辆。本研究中的概念版 NGCV 包括七名乘员、一辆载人战车(MCV* )和两辆作为僚机的无人机器人战车(RCV),以提高乘员的生存能力和杀伤力。然而,在与移动中的有人驾驶战车分离并坐在其中的情况下操作无人战车,会改变当前许多任务的性质,这就需要适当地重新分配功能并提供有效的界面,以支持人类决策和团队表现。当问题空间充满不确定性和可能性时,这一点尤其具有挑战性。
在一种设想的使用变化中,NGCV 的排由两个部分组成(图 1),每个部分包括一辆 MCV 和两辆无人遥控车。每辆车主要由两人操作,一个分队的所有操作员都坐在该分队的 MCV 车内,第七人可能担任车长和分队长。其中一名分队长(又称车长)可能担任排长,负责监督一个排中的两个分队;另一名车长可能担任排长。排长还可能与排外的实体进行互动,包括连长、地区指挥官和其他步兵单元。作为未来装甲战斗的一部分,NGCV 排应能够执行进攻、防御和稳定任务,以支持统一的陆地行动。我们选择了一个 NGCV 排在运动接触(MTC)场景中的部分,作为第一阶段详细研究的可控部分。
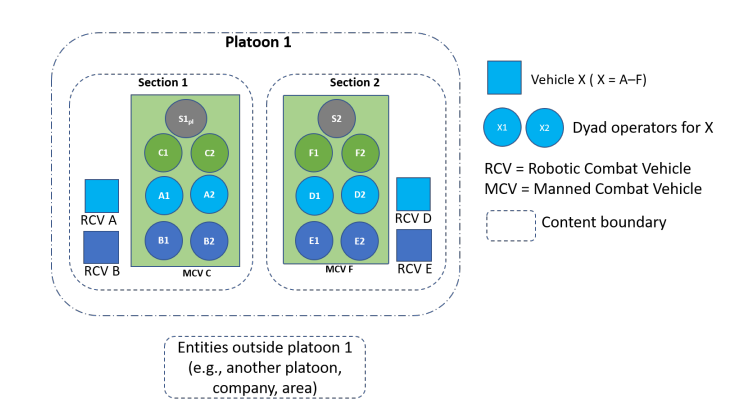
图 1 NGCV 排的可能坐姿结构。A-F 是车辆的标记,每辆车由同一 MCV 中的两人控制,颜色与所控制的车辆相同(例如,A1 和 A2 控制 RCV A,均为浅蓝色)。分队长的颜色为灰色(S1pl = 排长,S2 = 排中士),可分别担任车辆指挥官和监督 1 分区和 2 分区,而 S1pl 还负责监督整个排。
1.3 当前工作
本报告的目标是开发能够衡量 HAT 在 NGCV 环境中有效性的指标和模型。由于无法使用实际运行中的 NGCV 或现有经验丰富的 RCV 人员,我们的方法分为三项任务:
-
任务 1(第 2 节): NGCV 的背景以及 MTC 运行期间的相关互动
-
任务 2(第 3 节): 装甲排核心基线任务的交互分类法和潜在的交互策略
-
任务 3(第 4 节): 综合团队合作有效性模型和团队层面的团队合作有效性潜在衡量标准建议
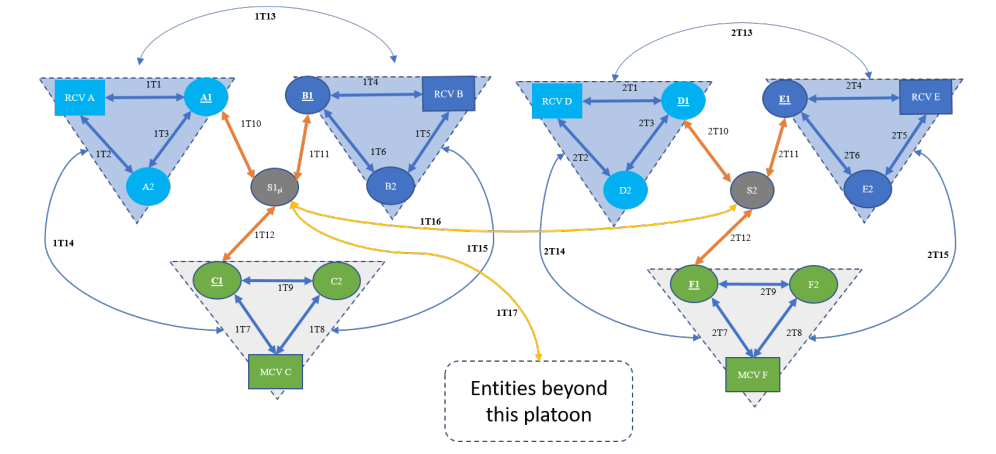
图 12 排中的通信渠道。为了跟踪每次互动,我们使用了互动标签,例如 "1T1":T 前的数字 = 第一节,T = 两人小组/小队,T 后的数字 = 互动的 ID 代码;本排以外的实体 = 主要是连长。

