
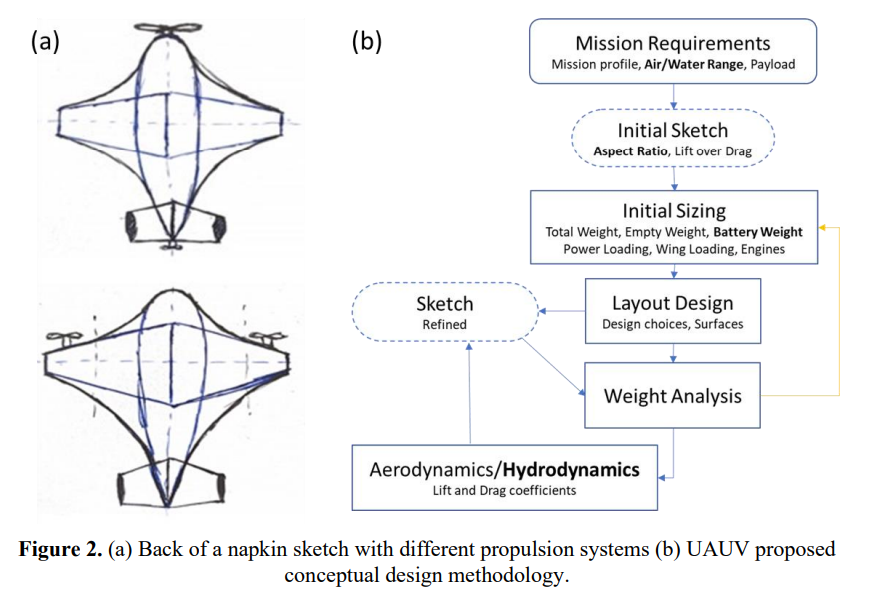
在这项工作中,提出了混合无人驾驶航空器(UAV)--无人驾驶潜航器(UUV)平台的概念设计方法。随着任务的复杂性和不同平台之间的互操作性的需求与日俱增,混合平台正成为一个重要的解决方案。混合型UAV-UUV可以在空中和水下环境中进行无缝和重复的操作,这一点众多动物物种已经以优化的方式执行。设计方法从审查少数可用的原型开始,创造最初的设计趋势,并继续进行分析计算。这些计算以飞机设计教科书为基础,并考虑到混合平台的特殊性进行了修改,如水和空气之间的过渡手段。混合翼体(BWB)的布局配置被选中,因为它具有许多空气动力学的优势。然后通过使用高保真CFD计算来验证分析计算结果。概念设计阶段的结果表明,所提出的混合无人机-UUV配置的方法提供了一个良好的设计精度。最后,这种方法的结果,即混合UAV-UUV平台,有可能解决包括水下和空中环境的任务的操作差距。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年5月22日
Arxiv
0+阅读 · 2023年5月18日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年5月22日
Arxiv
0+阅读 · 2023年5月18日