
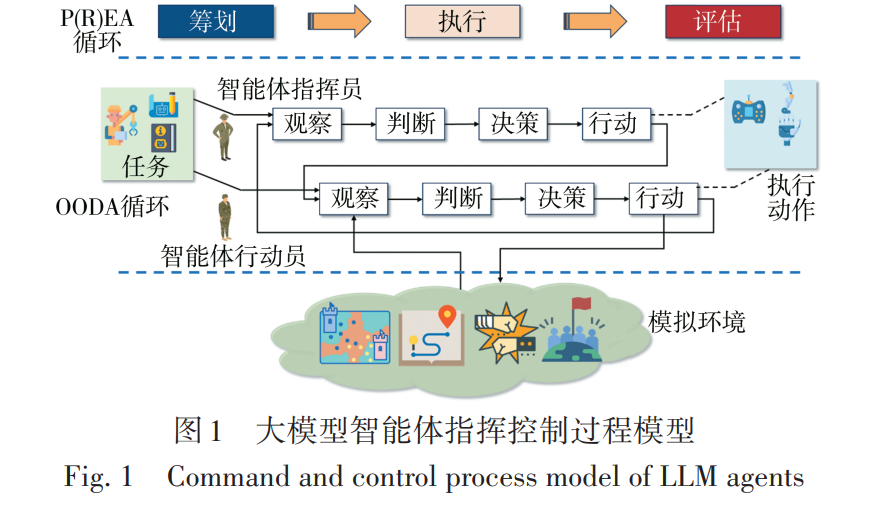
聚焦于闭合指挥控制链路中大语言模型多智能体系统,旨在探索大模型多智能体在指挥控制链路中的关键技术,提出多循环嵌套的大语言模型多智能体指挥控制模型,为突破无人化指挥控制、自主协同打下坚实的理论和技术基础。充分考虑到大语言模型问答式的交互模式,提出P (R)EA&OODA多循环嵌套的大模型多智能体指挥控制过程模型,以大模型系统提示词为切入点,提出大模型指挥控制智能体框架,设计指挥员和行动员两种 “拟人化” 大模型智能体,设计实现基于物理引擎的文本指挥控制仿真任务 “追击游戏” 从多个维度对系统进行评估和分析,验证模型的有效性。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2024年12月25日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2024年12月25日