
介绍了战术战斗管理器(TBM),它是一种智能体,使用多种综合人工智能技术在模拟超视距(BVR)空战场景中控制自主无人飞行器。TBM 结合了目标推理、自动规划、对手行为识别、状态预测和差异检测等技术,可在实时、动态、不确定和敌对的环境中运行。通过实证研究证明,在 BVR 场景中,TBM 的表现明显优于专家编写的智能体。还报告了一项消融研究的结果,该结果表明智能体架构的所有组件都需要最大限度地提高任务性能。
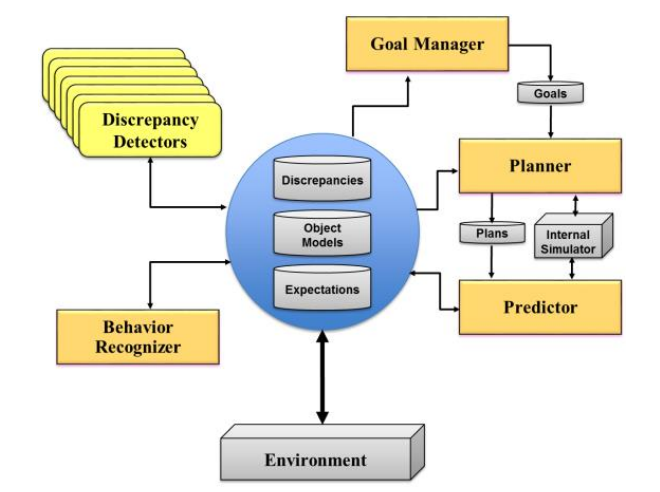
图 1:由共享资源(灰色)、推理组件(橙色)和差异检测器(黄色)组成的战术战斗管理器(TBM)概念图。箭头表示信息在各个组件之间的移动。
超视距(BVR)空战是现代空对空战斗的一种形式,在这种战斗中,飞机之间的交战距离较远,通常可达数百公里。与第一次和第二次世界大战期间常见的近距离犬牙交错的战斗相比,BVR 战斗往往不那么被动,而是涉及更多的长期规划和战略。在本文中,我们介绍了一种名为 "战术战斗管理器"(TBM)的智能体,其设计目的是在 BVR 战斗场景中利用大量综合人工智能技术控制无人驾驶飞行器(UAV)。
BVR 空中格斗有几个关键特性,使其成为一个有趣的研究领域,需要采用综合设计而不是任何单一的人工智能技术。交战涉及多架飞机,既有队友,也有对手,在有争议的空域中作战。环境是连续的、部分可观测的(即由于传感器范围有限)和嘈杂的(即由于传感器误差)。此外,飞机需要满足严格的实时约束条件,以躲避对手的攻击和避免危险动作(例如飞得太低、与队友相撞)。
我们的集成架构使用多个并行组件,每个组件都可以访问、创建和修改共享数据源中的信息。这种并行设计允许各组件实时处理信息,避免了速度较慢的组件造成的延迟。TBM 使用目标推理 [Aha 等人,2013 年;Roberts 等人,2016 年] 来动态推理其目标,并根据突发事件或机会(如对手攻击、对手与中队分离)修改目标。自动规划用于根据 TBM 的目标生成计划。由于对手飞机的计划最初是未知的,并可能随着时间的推移而改变,因此 TBM 会持续监控对手飞机的行动,并进行行为识别,以预测其当前计划和目标。
TBM 利用自己的计划以及友机和敌机的行为进行状态预测(即预测环境可能发生的变化)。然而,由于 TBM 可能使用不完整的感知信息、错误的传感器值或对对手行为的不正确假设,因此它会持续执行差异检测,以确定其预测、假设或对手模型是否存在任何缺陷。本文的其余部分将介绍我们的智能体架构,并说明包含每个集成组件的理由。在第 2 节中,我们描述了 BVR 空中格斗领域,并正式提出了要解决的问题。第 3 节介绍了我们的集成智能体设计和每个组件的作用。我们将在第 4 部分对 TBM 的设计进行实证评估,并在第 5 部分讨论相关工作。最后,我们在第 6 节讨论了我们工作的方方面面,并在第 7 节总结了我们的贡献和未来工作领域。



