

宾夕法尼亚州立大学与海军水面作战中心卡德鲁克分部(NSWCCD)合作,对一个完整的自动降落系统进行了规模试验。这些试验利用了低成本的商品、电子设备和多旋翼飞机,通过在卡德洛克波浪槽设施的船舶模型上着陆来展示自动着陆能力。这些实验涉及到轨迹生成方法、可扩展的飞行控制法、甲板运动预测算法、基于视觉的传感和状态估计的开发和实施。
这个项目提供了三个主要贡献:
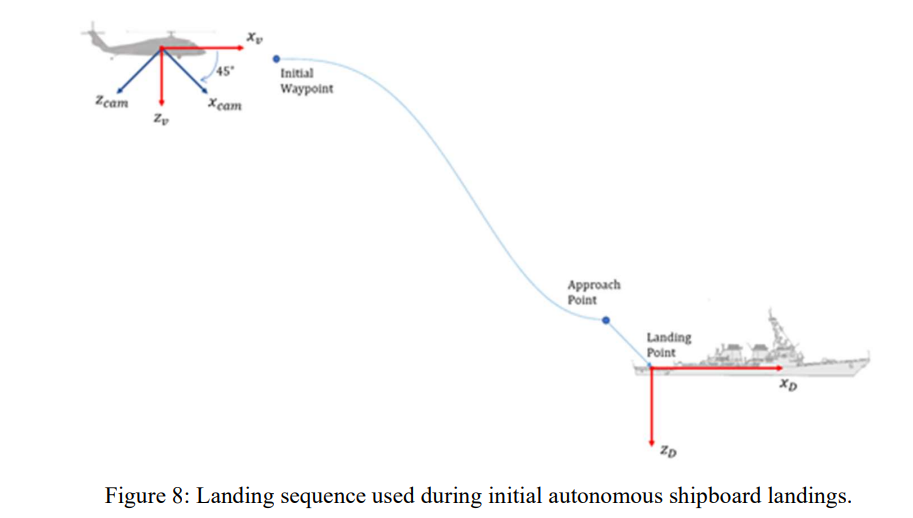
1.首次对自主着陆引导算法进行了严格的模型规模的实验评估,其中考虑到了规模的缩小。这些测试需要开发可扩展的飞行控制法则,使飞机的闭环动力学与不同的测试规模相关。此外,作为这项工作的一部分,开发了两种引导算法:一种是基线的 "甲板跟踪 "方法,它跟随甲板运动,同时以恒定的速度缩小甲板和飞机之间的差距;另一种是先进的方法,它利用二次编程优化,直接规划着陆路径,预测着陆时的甲板状态。这些结果使人们深入了解了在着陆路径优化中直接使用典型的甲板运动预测方法的可行性,以及采取这种方法的潜在好处。
2.演示了在按比例的波浪条件下的自主着陆,并在控制环路中直接使用基于视觉的传感和估计方法。估算方法利用了专门用于相对姿势估算的靶标("AprilTags")的测量,并通过无痕卡尔曼滤波器融合了视觉和IMU测量。
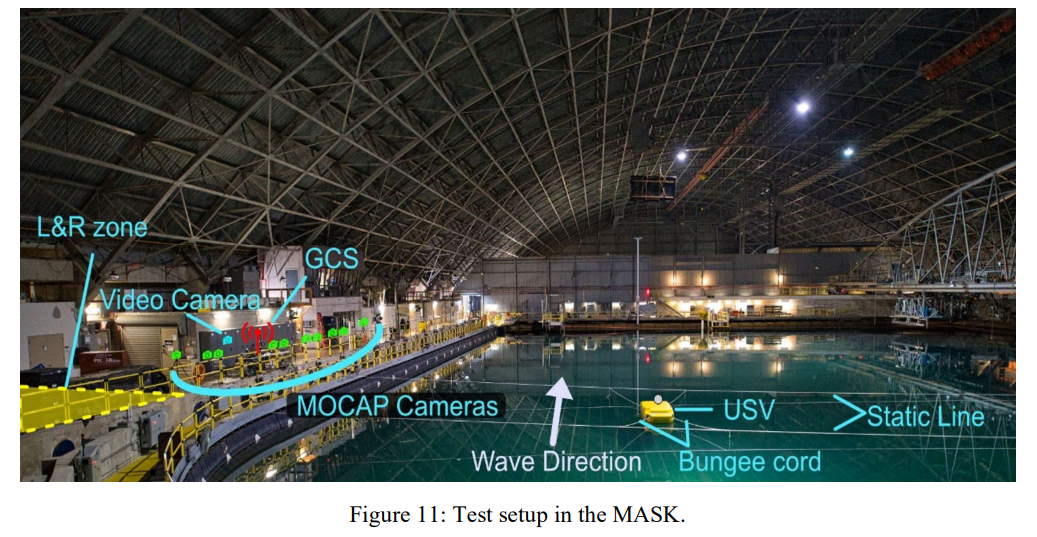
3.建立了一个硬件和软件配置,用于在机动和航海盆地(MASK)进行自主飞行测试。该测试装置已在200多次自主飞行测试中进行了全面测试,并可用于MASK设施中未来的自主着舰和飞行控制研究。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年8月21日
Arxiv
0+阅读 · 2023年8月18日
Arxiv
0+阅读 · 2023年8月18日
Arxiv
224+阅读 · 2023年4月7日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年8月21日
Arxiv
0+阅读 · 2023年8月18日
Arxiv
0+阅读 · 2023年8月18日
Arxiv
224+阅读 · 2023年4月7日