本文展示了本研究第一部分讨论的 L-V-C 模拟框架的实施。在空战 TTP 的测试与评估 (T&E) 中演示了该框架的实施。TTP 由描述飞机飞行员如何协调行动以实现空战目标的规则组成。在演示中,TTP 规则分别在 C、V 和 L 模拟阶段反复制定。在 C 阶段,在不考虑人机交互(HMI)中人类行为影响的情况下,确定与飞机存活概率(Ps)和击落概率(Pk)相关的最优规则。在 V 阶段,通过评估 Pk 和 Ps 的适用性,以及有关飞行员态势感知、心理工作量和 TTP 规则遵守情况的人机交互措施,对最佳规则进行修改。在 L 阶段,使用 F/A-18 飞机和合格的战斗机飞行员来评估在 C 和 L 阶段开发的 TTP 是否能在真实环境中实现可接受的 Pk、Ps 和 HMI 测量。
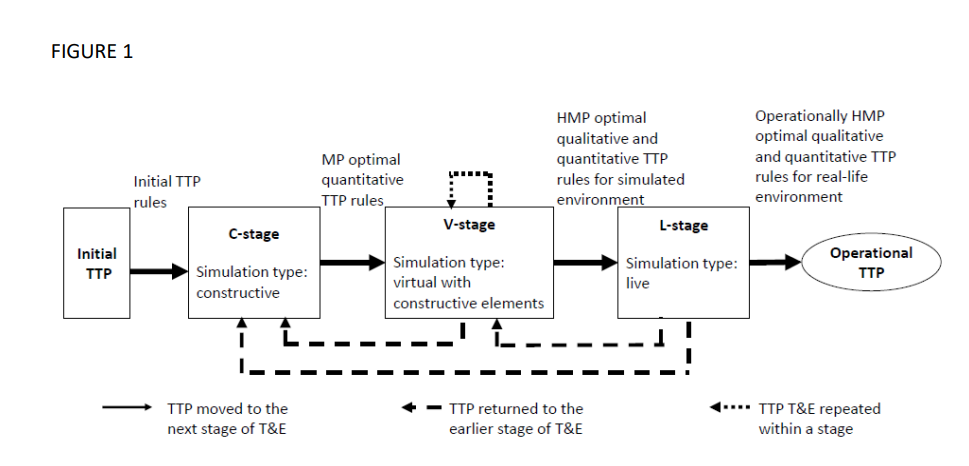
如图 1 所示,L-V-C 仿真框架分为 C、V 和 L 三个阶段。在第一个 C 阶段,初始 TTP 的定量规则被实施到 C 仿真中,敌机被设定为遵循初始场景中确定的行为。进行 C 模拟运行,直到找到最大杀伤概率(Pk)和满足生存概率(Ps)=1 约束条件的机器性能(MP)最优值(见第 1 部分)。C 阶段不考虑僚机的态势感知 (SA)、脑力劳动负荷 (MWL)、标准性能 (NP) 或人机性能 (HMP) 输出。有关 SA、MWL、NP、HMP 及其测量的完整说明,请参见第 1 部分。如果因 Vor L 阶段的 SA、MWL、NP 或 HMP 输出不可接受而重复 C 阶段(见图 1 中从 V- 和 L 阶段到 C 阶段的虚线),则通过最小化 (Pk-Pkref)^2 放宽原始优化标准,其中参考杀伤概率(用 Pkref 表示)根据 V- 或 L 阶段的结果以及之前 C 阶段获得的 Pk 最佳值进行选择。通过分析前一个 V 或 L 阶段的结果,选出在新的 C 阶段应调整其值的定量规则。
第一个 V 阶段既考虑初始 TTP 的定性规则,也考虑源自 C 阶段的 MP 最佳定量规则。如果重复 V 阶段,则定性规则源自前一个 V 阶段或 L 阶段(见图 1 中从 L 阶段到 V 阶段的虚线,以及从 V 阶段到 V 阶段的虚线)。
僚机作为参与者在 V 仿真中飞行,而所有其他飞机则作为构造实体在仿真中执行。记录僚机的 NP、SA、MWL 和 HMP 输出。Pk 是根据模拟开始和结束时敌机存活率估算的,Ps 是根据模拟开始和结束时友机存活率估算的。友方建设性实体被设定为遵循 TTP T&E 前几个阶段得出的规则,敌方建设性实体被设定为遵循与 C 阶段相同的情景。参与者的任务是遵循定向定性规则和 MP 最佳定量规则。参与者不会被告知情景是如何展开的。
如果在 V 阶段结束时 Pk 和 Ps 不尽如人意,则会确定可修改的规则,以改进总体 HMP 输出。如果 Pk 和 Ps 都令人满意,则目标是确定可改善 NP、SA 或 MWL 的规则。如果修改了定量规则,则 TTP 返回 C 阶段,而不修改定性规则(见图 1 中从 V 阶段到 C 阶段的虚线)。如果定性规则被修改,则重复 V 阶段,对参与者的定性规则进行精炼的口头描述(见图 1 中从 V- 到 V 阶段的虚线)。只有当建构实体的定性规则影响到参与者遵守规则的能力时,才会对其进行调整。
每次重复 V 阶段时,都会将 NP、SA、MWL、Pk 和 Ps 与前一个 V 阶段的结果进行比较,目的是找出模拟的 Pk、Ps 与 NP、SA 和 MWL 分数之间的显著差异。一旦 V 阶段的结果令人满意,就会获得模拟环境中的 HMP 最佳规则,TTP T&E 就会进入 L 阶段。
在 L 阶段,先前确定的 HMP 最佳规则将在真实环境中进行评估。L 阶段使用真实的飞机和飞行员。参与者的任务是遵循 V 阶段确定的 HMP 最佳规则。所有其他飞行员作为辅助飞行员,遵循前一阶段使用的建设性实体规则。以 Pk 和 Ps 衡量的 HMP 输出以及参与者的 NP、SA 和 MWL 分数将被记录下来。这里,Pk 和 Ps 的估算方法与 V 仿真相同。对 V 阶段和 L 阶段的结果进行综合比较。如果 L 阶段的 Pk 和 Ps 是可接受的,并且 NP、MWL 和 SA 的得分没有明显低于 V 阶段的得分,则结果是平衡的。如果情况并非如此,则以与 V 阶段相同的方式确定可能需要修订的规则。然后,根据对规则进行定性或定量调整的需要,将 TTP 返回 C 阶段或 V 阶段(见图 1 中从 L 阶段到 C 阶段和 V 阶段的虚线)。如果 V 阶段和 L 阶段的结果平衡,则 TTP T&E 结束。下一节将演示 L-V-C 模拟框架的实施。