开发适用于复杂环境的人机协作团队基础理论与验证算法(具备随环境任务认知演化自适应能力),是至关重要的研究领域。随着数据获取,需发展动态规划策略以高效利用信息。在搜救(SaR)场景中,核心目标包括定位幸存者、通过人-幸存者接触模拟救援、最小化人类队员风险。本研究旨在提升不确定条件下人机协作效能,优化团队绩效与安全性,聚焦搜救任务驱动的概率化多智能体规划方法。
首先探究多机器人非对抗性搜索问题。由于仅掌握概率性先验信息,受害者真实位置存在不确定性。目标是在任务时限内规划最优(或近优)路径,最大化搜索团队拦截目标的可能性。经证明该问题属NP难问题,提出首套混合整数线性规划(MILP)模型,同步支持多搜索者、任意捕获半径及漏检率约束。采用MILP规划范式可借助现代求解器强大功能,相较现有技术显著提升计算性能,实现更长规划周期。
在模型基础上引入危险感知概念——通过人机共享场景感知机制评估风险,使环境认知随任务推进动态演化。基于不同智能体风险耐受度,通过条件规划探索风险-收益权衡机制。进一步将研究扩展至搜索外的多类任务,最终采用概率模型描述规划路径与任务完成状态。创新性提出融合任务需求概率认知、任务间依赖关系与空间分布、智能体能力异构性及环境动态交互响应的综合问题框架。任务方案评估基于概率预测与团队组建的实体化收益概念(搜救任务关键要素)。
世贸中心灾难救援中机器人部署暴露了系统多维度局限(含人机协作)。尽管机器人对救援贡献显著,但数据分析表明无线电操控严重制约效能,导致救援结束数月后仍在录像中发现遇难者遗体[19]。近二十年至少28起灾难场景中部署了不同自主等级机器人[66],体现显著技术进步。机器人及无人系统应用激增源于其增强操作能力同时降低成本的特性[76]。但据[19]统计,超50%救援机器人故障仍归因于人为失误(如操控偏离路径)。此类数据凸显多智能体系统(MAS)人机协作能力开发的重要性。开发适用于复杂环境的人机团队基础理论与验证算法(具备环境任务认知动态适应能力),是亟待突破的研究领域。随着数据获取,需发展动态规划策略以高效利用信息。在搜救场景中,核心目标包括定位幸存者、通过人-幸存者接触模拟救援、最小化人类队员风险,最终提升不确定条件下人机协作效能及团队绩效与安全。
针对位置不确定的移动/静止目标搜索是经典研究课题[21,88],目标是将搜索者部署至团队最可能拦截目标的区域。多数多路径优化算法随搜索者数量与规划周期呈指数级复杂度,难以实际应用。[44]提出搜索者数量线性可扩展的多机器人高效搜索路径规划(MESPP)算法,采用基于模式枚举的有限时域规划近似——顺序生成各搜索者所有可能路径,选择最大化时序奖励函数的方案。但该方法在双搜索者场景下规划周期超五步即失效。搜救任务另一核心是团队组建(属多机器人任务分配MRTA范畴)。其本质是在人机能力约束与任务目标下,对可行方案的评估优选。[35]展示了多种MRTA变体的优化问题求解方法,但亟需适应动态环境与信息缺失的灵活方法,同时需兼顾任务依赖性与机器人协作。此外,多智能体系统的异构性管理(能力/传感器/通信差异)是实际搜救应用的前提,现有研究常忽视这些关键要素且未纳入不确定性考量。
本研究方法虽受搜救场景驱动,但理论与算法经微调即可适用于更广领域:仓储管理、图书馆书籍整理、超市货架补货与商品分拣、清洁作业、信息收集与监控等。例如基于图结构的概率运动目标搜索问题,与购物中心清洁机器人轨迹优化(在平面网格化与高污染概率区域最大化"清洁度"变量)具高度相似性。通过人机智能体间高效任务调度(替代中央操作员监控模式)可提升监控效能。
基于上述研究机遇,本论文探索以下核心问题:
Q1. 当目标位置仅具概率数据(无精确目标点)时,如何将多机器人搜索形式化为路径规划优化问题?问题复杂度如何?
Q2. 能否构建兼容现代优化工具的搜索问题框架?该框架相较现有技术有何优势?
Q3. 人类能否作为搜索团队成员(替代传统监督角色)?如何融合搜救专家技能与机器人感知能力以增强场景理解?
Q4. 危险概念的协同场景认知如何影响搜救任务规划效能与人员安全?
Q5. 能否数学描述在动态交互环境中基于概率任务与路径认知的任务演化过程?
Q6. 能否利用该模型预测任务成功概率(采用人类可理解概念)并客观评估方案性能?
第二章探究多机器人高效搜索路径规划(MESPP)问题[44]:在多机器人图环境部署中,限期捕获移动目标。针对Q1将问题形式化为优化命题,证明即使在简单实例中仍属NP难问题。突破现有基于路径枚举的算法局限,提出首套MILP模型(支持多搜索者/任意捕获半径/漏检率同步处理)。通过方案性能评估回应Q2:相较现有技术计算耗时降低98%,且具备分布式实施适配性。
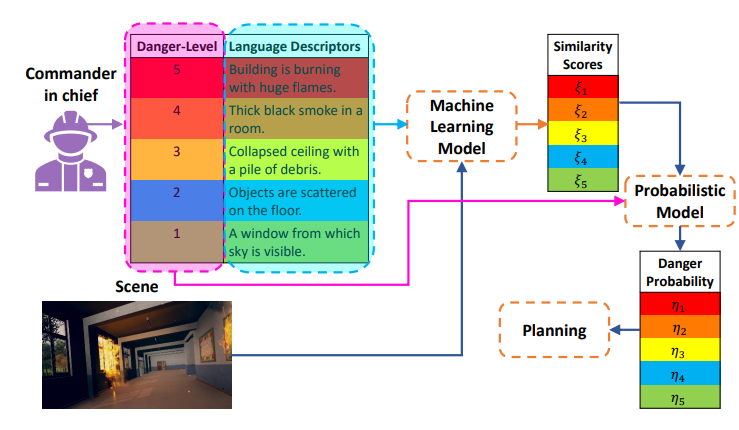
第三章基于第二章方法,研究搜救任务中普遍存在的风险-收益权衡机制如何融入多机器人搜索框架。鉴于危险感知具主观性,提出融合人类自然语言描述与机器人图像数据的场景风险评估框架。采用前沿深度神经网络计算描述-图像相似度得分,转化为危险等级概率分布。通过关联位置点与局部预估危险度的智能体损失概率,提出在线风险感知型MESPP变体。规划器据此加权危险度与目标捕获概率,结果表明风险感知规划器在任务性能(成功率与耗时)损失极小情况下显著提升安全性。本章回应Q3-Q4。
第四章形式化同步任务路径分配问题(称"不确定环境下空间分布式任务的多智能体协作"MASTU),回应Q5。融合概率论、集合论与马尔可夫过程基础概念,提出适应异构智能体团队、概率任务认知及动态交互环境的任务演化模型。该模型通过多步前瞻预测各类任务成功概率,同时评估各智能体路径可行性。通过三项目标函数(分别强调问题不同维度)展示模型如何支持不确定环境下的方案性能分析。