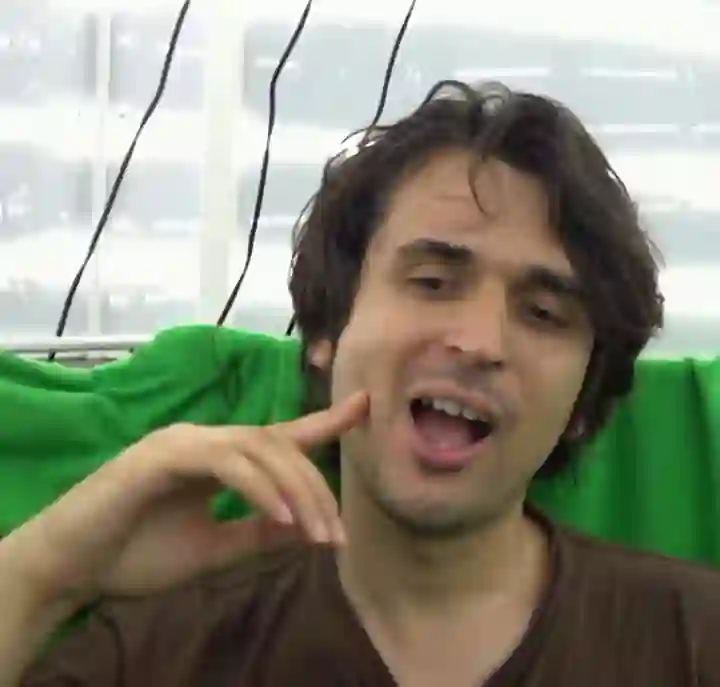
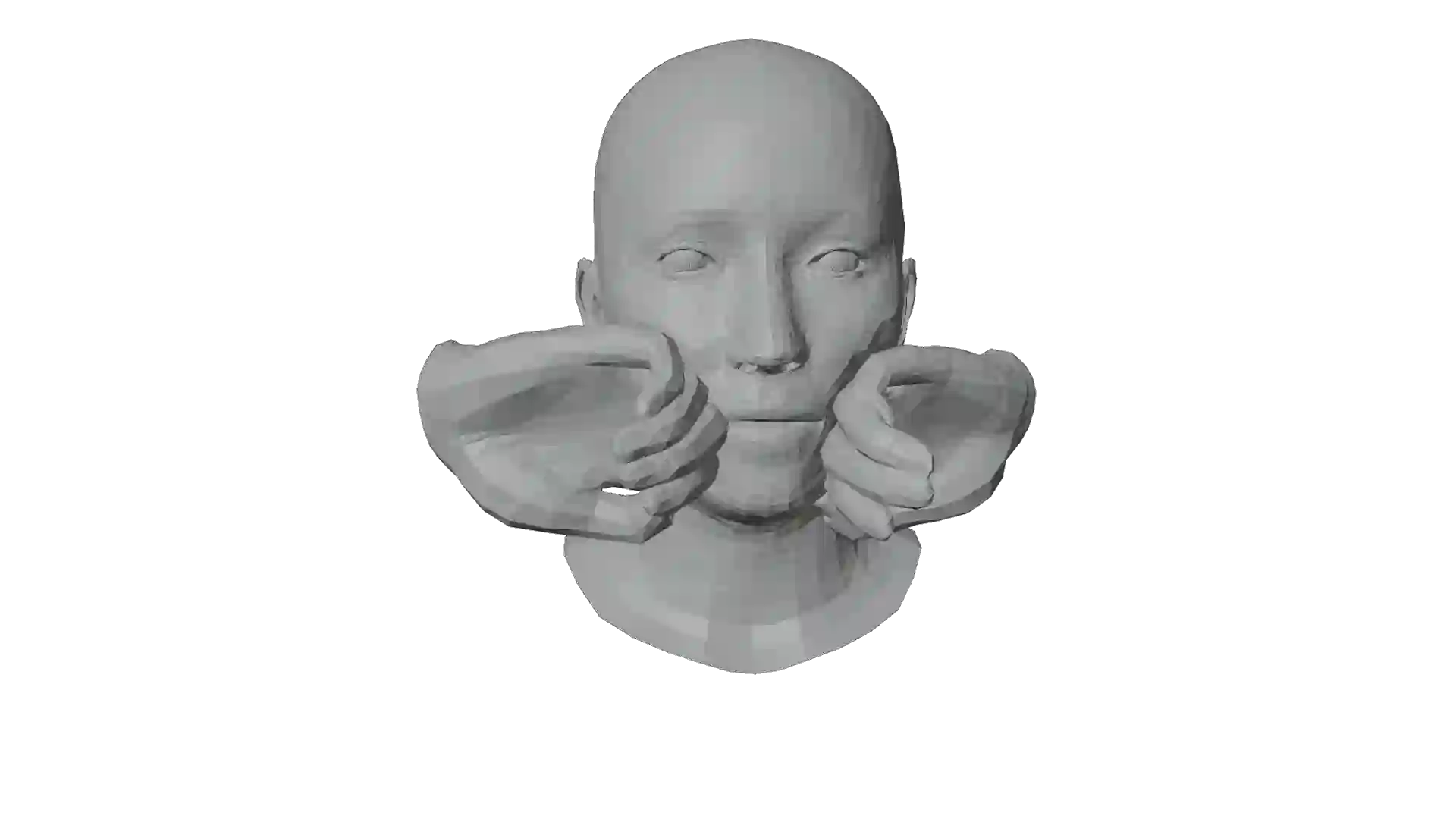
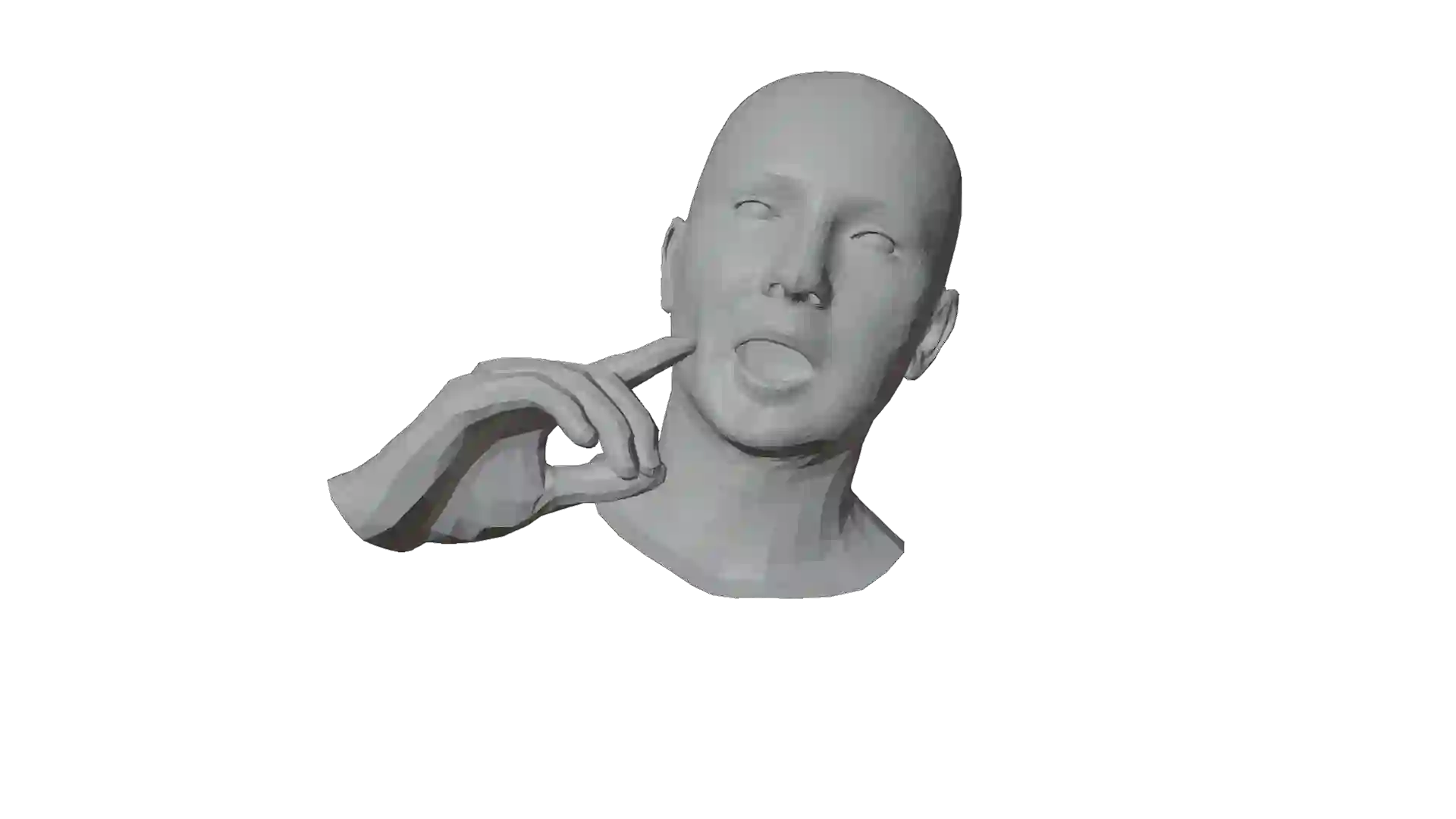
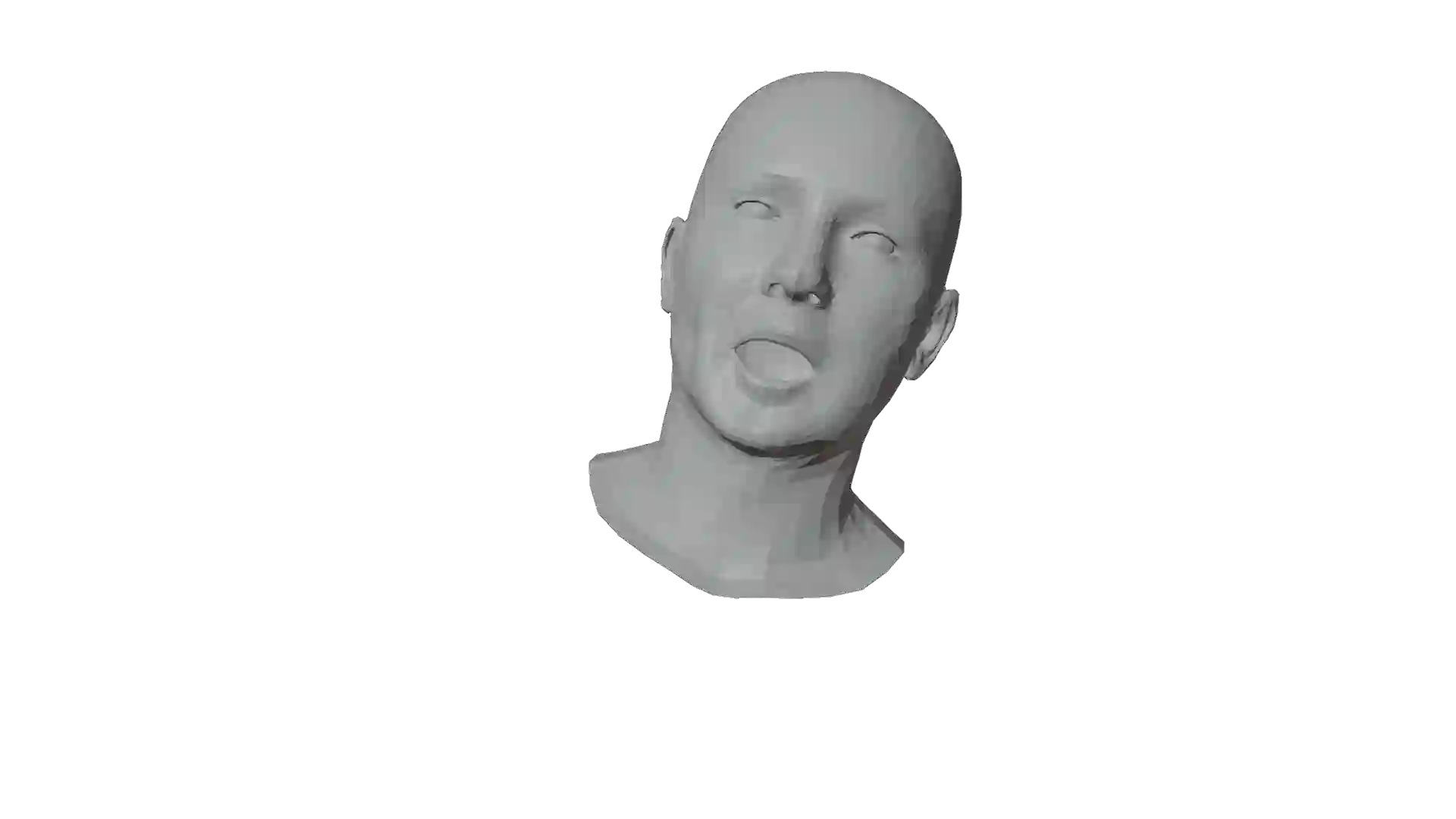
Existing methods for 3D tracking from monocular RGB videos predominantly consider articulated and rigid objects. Modelling dense non-rigid object deformations in this setting remained largely unaddressed so far, although such effects can improve the realism of the downstream applications such as AR/VR and avatar communications. This is due to the severe ill-posedness of the monocular view setting and the associated challenges. While it is possible to naively track multiple non-rigid objects independently using 3D templates or parametric 3D models, such an approach would suffer from multiple artefacts in the resulting 3D estimates such as depth ambiguity, unnatural intra-object collisions and missing or implausible deformations. Hence, this paper introduces the first method that addresses the fundamental challenges depicted above and that allows tracking human hands interacting with human faces in 3D from single monocular RGB videos. We model hands as articulated objects inducing non-rigid face deformations during an active interaction. Our method relies on a new hand-face motion and interaction capture dataset with realistic face deformations acquired with a markerless multi-view camera system. As a pivotal step in its creation, we process the reconstructed raw 3D shapes with position-based dynamics and an approach for non-uniform stiffness estimation of the head tissues, which results in plausible annotations of the surface deformations, hand-face contact regions and head-hand positions. At the core of our neural approach are a variational auto-encoder supplying the hand-face depth prior and modules that guide the 3D tracking by estimating the contacts and the deformations. Our final 3D hand and face reconstructions are realistic and more plausible compared to several baselines applicable in our setting, both quantitatively and qualitatively. https://vcai.mpi-inf.mpg.de/projects/Decaf
翻译:暂无翻译