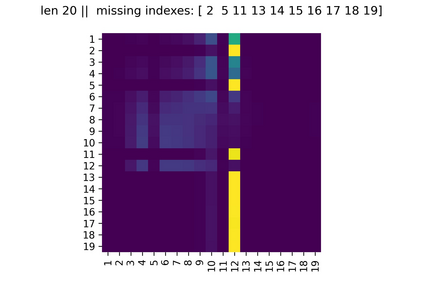
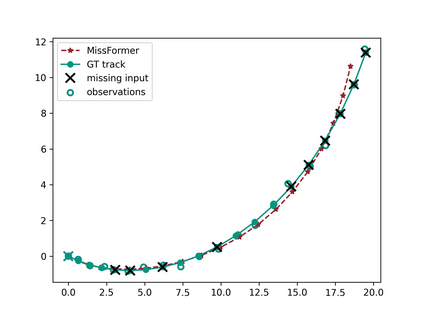
In applications such as object tracking, time-series data inevitably carry missing observations. Following the success of deep learning-based models for various sequence learning tasks, these models increasingly replace classic approaches in object tracking applications for inferring the objects' motion states. While traditional tracking approaches can deal with missing observations, most of their deep counterparts are, by default, not suited for this. Towards this end, this paper introduces a transformer-based approach for handling missing observations in variable input length trajectory data. The model is formed indirectly by successively increasing the complexity of the demanded inference tasks. Starting from reproducing noise-free trajectories, the model then learns to infer trajectories from noisy inputs. By providing missing tokens, binary-encoded missing events, the model learns to in-attend to missing data and infers a complete trajectory conditioned on the remaining inputs. In the case of a sequence of successive missing events, the model then acts as a pure prediction model. The abilities of the approach are demonstrated on synthetic data and real-world data reflecting prototypical object tracking scenarios.
翻译:在物体跟踪等应用中,时间序列数据不可避免地会丢失观测结果。在各种序列学习任务的深学习模型成功之后,这些模型越来越多地取代用于推断物体运动状态的物体跟踪应用的经典方法。传统跟踪方法可以处理缺失的观测结果,但默认情况下,其大部分深度对等方法不适于这种情况。为此,本文件引入了一种基于变压器的方法,用于处理不同输入长度轨道数据中缺失的观测结果。该模型通过不断增加所需推断任务的复杂性而间接形成。从再生成无噪音轨道开始,该模型然后学习从噪音输入中推导出弹道。通过提供缺失的标记、二元编码的缺失事件,该模型学会对缺失数据进行内置,并推导出以剩余输入为条件的完整轨迹。如果是一系列连续失踪事件,模型随后起到纯粹的预测模型作用。该方法的能力通过合成数据和反映原型物体跟踪设想的真实数据得到证明。