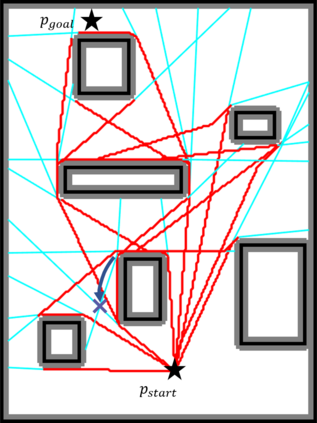
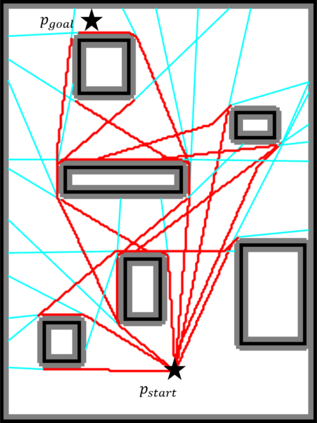
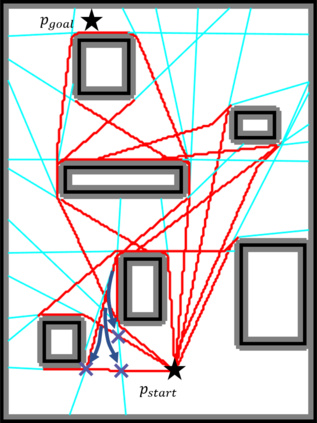
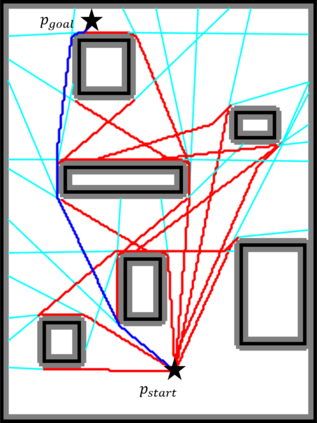
An efficient algorithm to solve the $k$ shortest non-homotopic path planning ($k$-SNPP) problem in a 2D environment is proposed in this paper. Motivated by accelerating the inefficient exploration of the homotopy-augmented space of the 2D environment, our fundamental idea is to identify the non-$k$-optimal path topologies as early as possible and terminate the pathfinding along them. This is a non-trivial practice because it has to be done at an intermediate state of the path planning process when locally shortest paths have not been fully constructed. In other words, the paths to be compared have not rendezvoused at the goal location, which makes the homotopy theory, modelling the spatial relationship among the paths having the same endpoint, not applicable. This paper is the first work that develops a systematic distance-based topology simplification mechanism to solve the $k$-SNPP task, whose core contribution is to assert the distance-based order of non-homotopic locally shortest paths before constructing them. If the order can be predicted, then those path topologies having more than $k$ better topologies are proven free of the desired $k$ paths and thus can be safely discarded during the path planning process. To this end, a hierarchical topological tree is proposed as an implementation of the mechanism, whose nodes are proven to expand in non-homotopic directions and edges (collision-free path segments) are proven locally shortest. With efficient criteria that observe the order relations between partly constructed locally shortest paths being imparted into the tree, the tree nodes that expand in non-$k$-optimal topologies will not be expanded. As a result, the computational time for solving the $k$-SNPP problem is reduced by near two orders of magnitude.
翻译:在 2D 环境下解决$k$最短的非热点路径规划问题的有效算法( k$- SNPP) 。 本文提出在 2D 环境中解决 $ 最短的非热点路径规划 (k$- SNPP) 问题的高效算法 。 由于加快对 2D 环境同质调幅空间的低效率探索, 我们的基本想法是尽早确定非k$的最优路径表层, 并终止沿此路径的路径调查 。 这是一个非边际做法, 因为当本地最短路径尚未完全建立时, 必须在路径规划过程的中间状态中完成。 换句话说, 要比较的路径没有在目标位置进行, 这使得同质理论化, 模拟具有相同终点的路径之间的空间关系。 本文是第一个开发系统基于距离的地形简化机制, 解决 $k$- SNPP的任务, 其核心贡献是维护本地最短路径的距离性秩序。 如果可以预测, 那么那些接近的路径就不会在 $ 美元 水平 的轨道上建立更安全的路径, 。 。 在最高级的路径中, 被证实的路径中, 。