
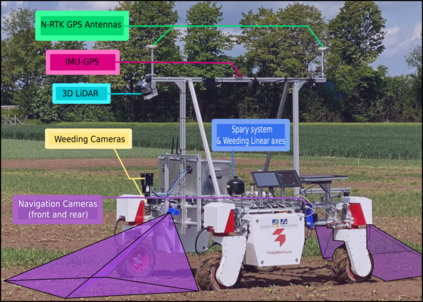
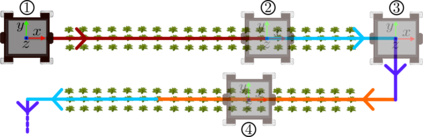
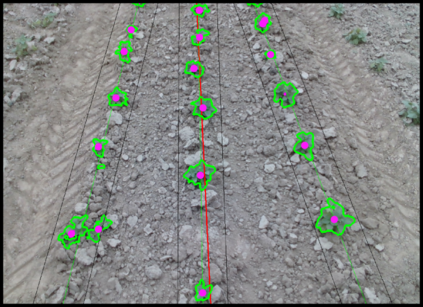
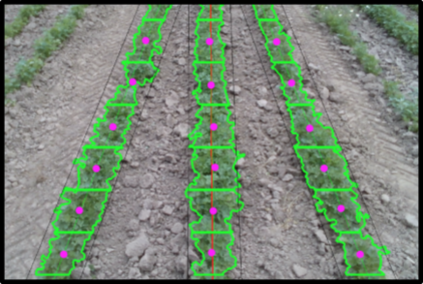
Autonomous navigation of a robot in agricultural fields is essential for every task from crop monitoring through to weed management and fertilizer application. Many current approaches rely on accurate GPS, however, such technology is expensive and also prone to failure~(e.g. through lack of coverage). As such, navigation through sensors that can interpret their environment (such as cameras) is important to achieve the goal of autonomy in agriculture. In this paper, we introduce a purely vision-based navigation scheme which is able to reliably guide the robot through row-crop fields. Independent of any global localization or mapping, this approach is able to accurately follow the crop-rows and switch between the rows, only using on-board cameras. With the help of a novel crop-row detection and a novel crop-row switching technique, our navigation scheme can be deployed in a wide range of fields with different canopy types in various growth stages. We have extensively tested our approach in five different fields under various illumination conditions using our agricultural robotic platform (BonnBot-I). And our evaluations show that we have achieved a navigation accuracy of 3.82cm over five different crop fields.
翻译:从作物监测到杂草管理和肥料应用等每一项任务都离不开农地机器人自主导航,从作物监测到杂草管理和化肥应用都是必要的。但是,许多现行方法都依赖精确的全球定位系统,这种技术费用昂贵,而且容易失败(例如,由于覆盖面不足)。因此,通过能够解释其环境的传感器(例如照相机)进行导航对于实现农业自主目标十分重要。在本文中,我们引入了一个纯粹基于愿景的导航计划,它能够可靠地引导机器人通过行块田。除了任何全球本地化或绘图之外,这种方法能够准确跟踪作物行和行之间开关,但只能使用机上摄像机。在新型作物行探测和新型作物行开关技术的帮助下,我们的导航计划可以部署在五大领域,在不同增长阶段使用不同型的树冠。我们利用农业机器人平台(BonnBot-I)在各种污染条件下对五个不同领域的导航方法进行了广泛的测试。我们的评估显示,我们在五个不同作物场上实现了3.82厘米的导航精确度。




相关内容

- Today (iOS and OS X): widgets for the Today view of Notification Center
- Share (iOS and OS X): post content to web services or share content with others
- Actions (iOS and OS X): app extensions to view or manipulate inside another app
- Photo Editing (iOS): edit a photo or video in Apple's Photos app with extensions from a third-party apps
- Finder Sync (OS X): remote file storage in the Finder with support for Finder content annotation
- Storage Provider (iOS): an interface between files inside an app and other apps on a user's device
- Custom Keyboard (iOS): system-wide alternative keyboards
Source: iOS 8 Extensions: Apple’s Plan for a Powerful App Ecosystem


