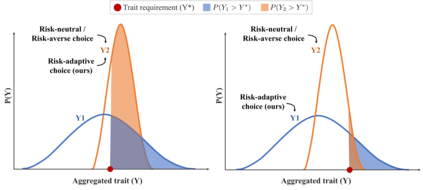
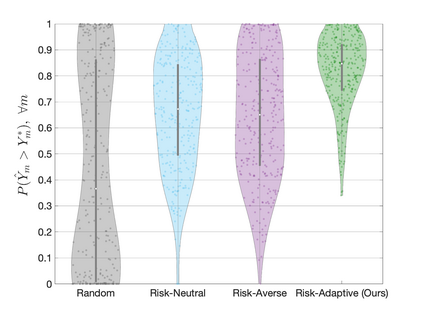
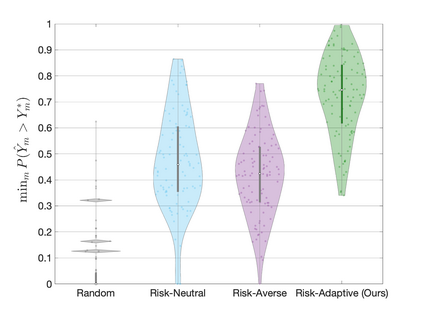
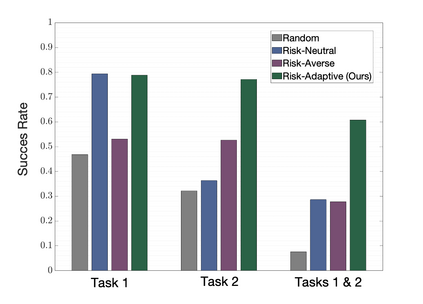
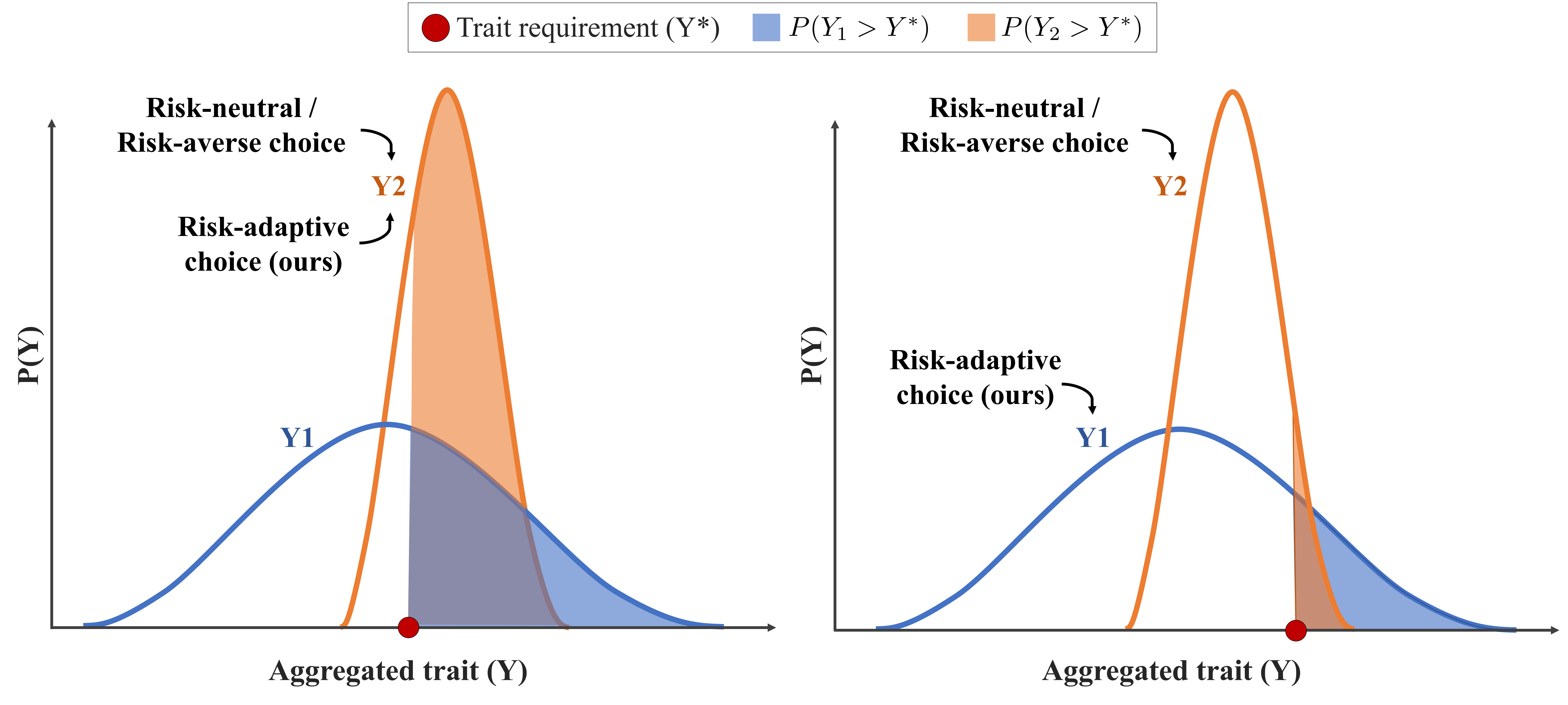
Multi-robot task allocation (MRTA) problems involve optimizing the allocation of robots to tasks. MRTA problems are known to be challenging when tasks require multiple robots and the team is composed of heterogeneous robots. These challenges are further exacerbated when we need to account for uncertainties encountered in the real-world. In this work, we address coalition formation in heterogeneous multi-robot teams with uncertain capabilities. We specifically focus on tasks that require coalitions to collectively satisfy certain minimum requirements. Existing approaches to uncertainty-aware task allocation either maximize expected pay-off (risk-neutral approaches) or improve worst-case or near-worst-case outcomes (risk-averse approaches). Within the context of our problem, we demonstrate the inherent limitations of unilaterally ignoring or avoiding risk and show that these approaches can in fact reduce the probability of satisfying task requirements. Inspired by models that explain foraging behaviors in animals, we develop a risk-adaptive approach to task allocation. Our approach adaptively switches between risk-averse and risk-seeking behavior in order to maximize the probability of satisfying task requirements. Comprehensive numerical experiments conclusively demonstrate that our risk-adaptive approach outperforms risk-neutral and risk-averse approaches. We also demonstrate the effectiveness of our approach using a simulated multi-robot emergency response scenario.
翻译:多机器人任务分配(MRTA)问题涉及优化机器人的任务分配。当任务需要多个机器人时,MRTA问题众所周知具有挑战性,当任务需要多个机器人,而团队由不同机器人组成时,挑战就更加严峻。当我们需要考虑到现实世界中遇到的不确定因素时,这些挑战就更加严峻。在这项工作中,我们处理在具有不确定能力的多元多机器人小组中组成联盟的问题。我们特别侧重于需要联合才能集体满足某些最低要求的任务。现有的对不确定性任务分配办法,要么最大限度地实现预期的回报(风险中性办法),要么改进最坏或最接近最坏情况或最坏情况的结果(风险中性办法)。在我们的问题中,我们展示了单方面忽略或避免风险的内在局限性,并表明这些办法实际上可以降低满足任务要求的可能性。在模型的启发下,我们开发了一种风险适应性的任务分配办法。我们采用适应性办法,在风险反向风险和寻求风险行为之间作出适应性交换,以便最大限度地达到任务要求的概率。我们的全面数字实验还表明,我们的风险对风险-适应性方法也表明我们采用了一种不偏向风险的模型式的多种反应。