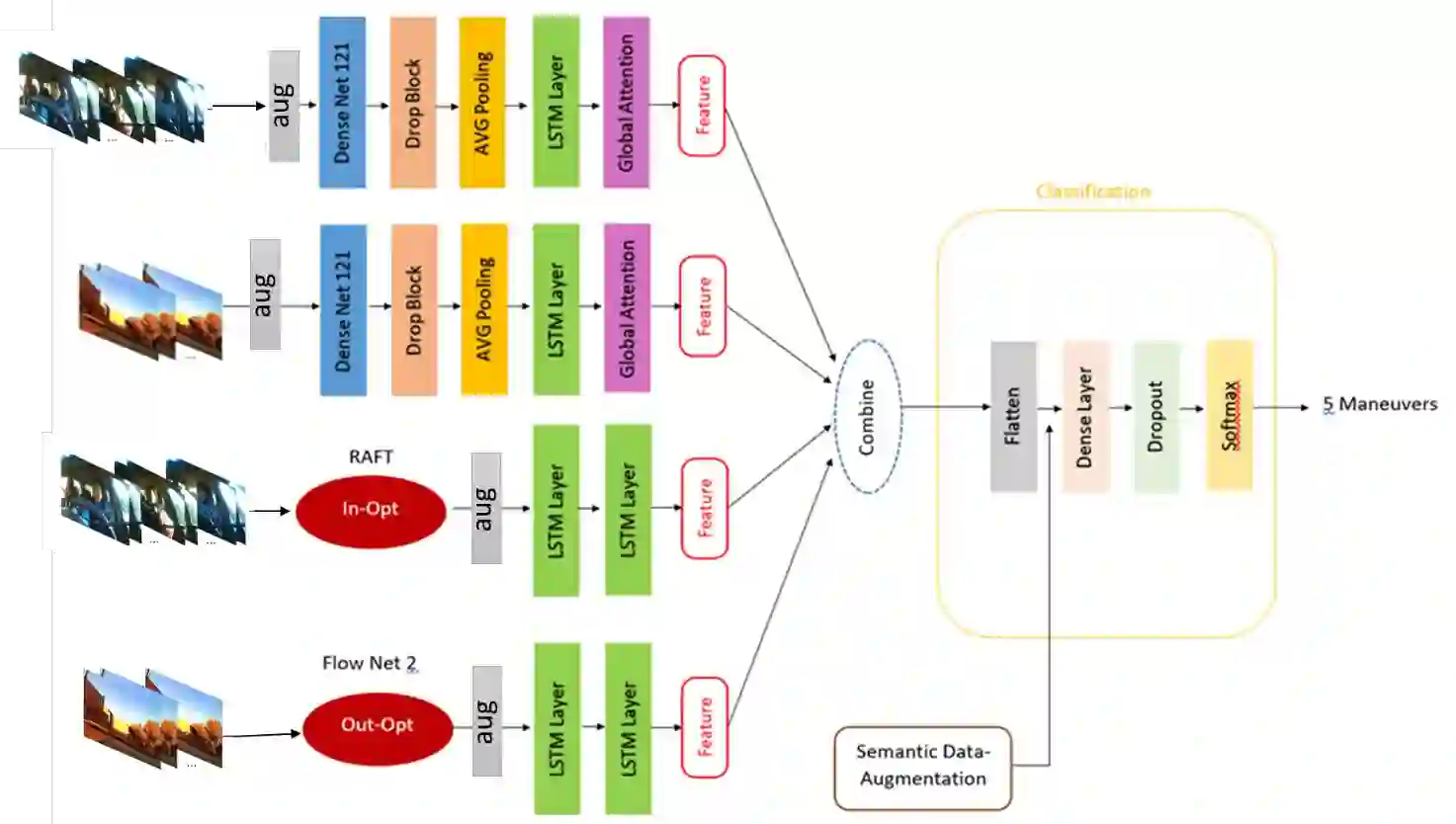
To improve driving safety and avoid car accidents, Advanced Driver Assistance Systems (ADAS) are given significant attention. Recent studies have focused on predicting driver intention as a key part of these systems. In this study, we proposed new framework in which 4 inputs are employed to anticipate diver maneuver using Brain4Cars dataset and the maneuver prediction is achieved from 5, 4, 3, 2, 1 seconds before the actual action occurs. We evaluated our framework in three scenarios: using only 1) inside view 2) outside view and 3) both inside and outside view. We divided the dataset into training, validation and test sets, also K-fold cross validation is utilized. Compared with state-of-the-art studies, our architecture is faster and achieved higher performance in second and third scenario. Accuracy, precision, recall and f1-score as evaluation metrics were utilized and the result of 82.41%, 82.28%, 82,42% and 82.24% for outside view and 98.90%, 98.96%, 98.90% and 98.88% for both inside and outside view were gained, respectively.
翻译:为提高驾驶安全和避免汽车事故,高度关注高级驾驶协助系统(ADAS),最近的研究侧重于预测驾驶员的意图,作为这些系统的一个关键部分。在本研究中,我们提出了新的框架,其中使用4种投入来预测潜水员使用脑4cars数据集进行潜水,并在实际行动发生之前5、4、3、4、2、3、2、1秒后实现机动预测。我们在三种情景中评估了我们的框架:仅使用1个内部视图2)外部视图,3个内部和外部视图;我们将数据集分为培训、验证和测试组,并使用K倍交叉验证。与最先进的研究相比,我们的建筑在第二和第三情景中都更快并取得了更高的性能。使用精确度、精确度、回溯和F1分数作为评价指标,结果分别为外部视图82.41%、82.28%、82.42%和82.24%,外部视图98.90%、98.96%、98.90%和98.88%获得内部和外部视图的准确度、82.41%和98.88%。