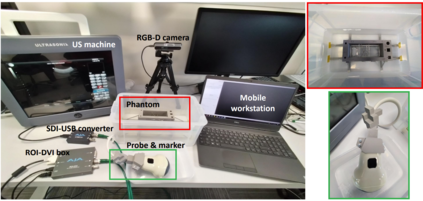
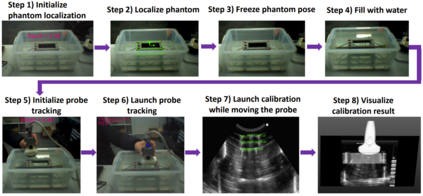
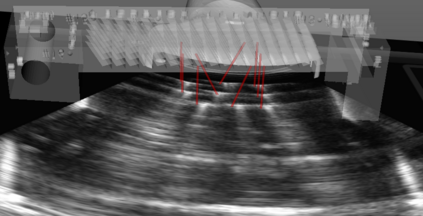
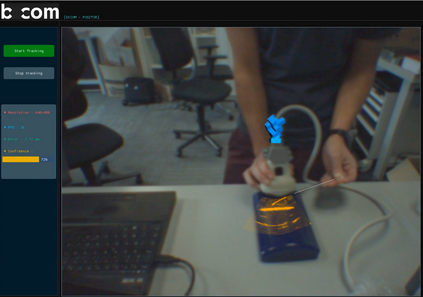
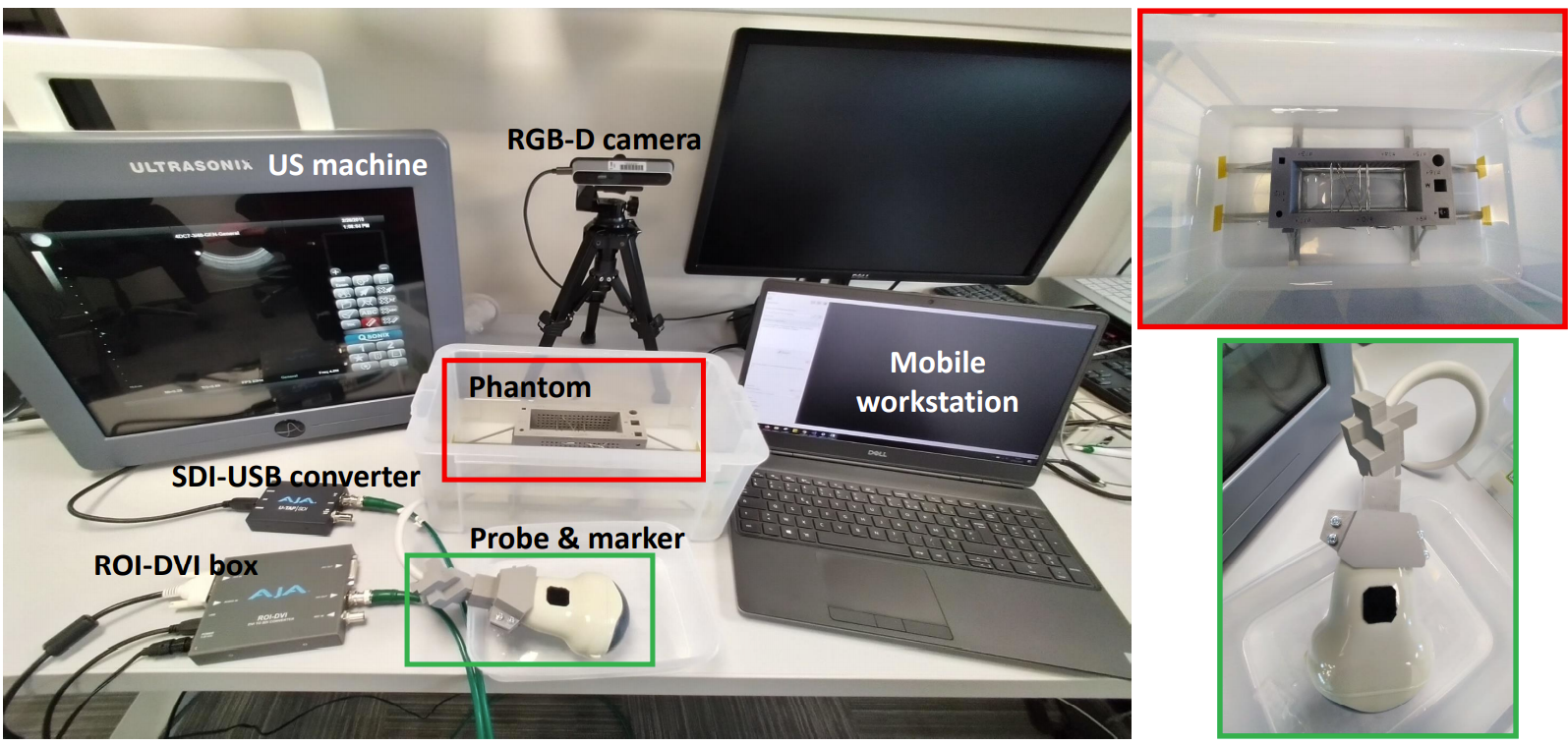
Purpose. Ability to locate and track ultrasound images in the 3D operating space is of great benefit for multiple clinical applications. This is often accomplished by tracking the probe using a precise but expensive optical or electromagnetic tracking system. Our goal is to develop a simple and low cost augmented reality echography framework using a standard RGB-D Camera. Methods. A prototype system consisting of an Occipital Structure Core RGB-D camera, a specifically-designed 3D marker, and a fast point cloud registration algorithm FaVoR was developed and evaluated on an Ultrasonix ultrasound system. The probe was calibrated on a 3D-printed N-wire phantom using the software PLUS toolkit. The proposed calibration method is simplified, requiring no additional markers or sensors attached to the phantom. Also, a visualization software based on OpenGL was developed for the augmented reality application. Results. The calibrated probe was used to augment a real-world video in a simulated needle insertion scenario. The ultrasound images were rendered on the video, and visually-coherent results were observed. We evaluated the end-to-end accuracy of our AR US framework on localizing a cube of 5 cm size. From our two experiments, the target pose localization error ranges from 5.6 to 5.9 mm and from -3.9 to 4.2 degrees. Conclusion. We believe that with the potential democratization of RGB-D cameras integrated in mobile devices and AR glasses in the future, our prototype solution may facilitate the use of 3D freehand ultrasound in clinical routine. Future work should include a more rigorous and thorough evaluation, by comparing the calibration accuracy with those obtained by commercial tracking solutions in both simulated and real medical scenarios.
翻译:目的 。 在 3D 操作空间定位和跟踪超声图像的能力对于多个临床应用大有裨益。 这通常是通过使用精确但昂贵的光学或电磁跟踪系统跟踪探测器来实现的。 我们的目标是利用标准 RGB-D 相机开发一个简单和低成本的、能增强现实回声框架。 方法。 一个原型系统,由3D 专门设计的 Occispital结构核心 RGB-D 相机、一个3D 标记和快速点云登记算法 FaVoR 组成,在Ultrasonix 常规超声波系统上开发并进行评估。 探测器是用3D 打印的 Nwire phantom 用软件PLUS 工具包跟踪的 3D 3 D 光谱。 拟议的校准方法是简化,不需要额外的标志或传感器。 此外,一个基于 OpenGLL的直观软件系统,用于增强现实应用。 校准探测器用来在模拟针头插入的情景中增强真实世界的视频。 超声波图像应该放在视频上, 并观测到未来镜像焦能结果。,,用AR- der- 3 der3 der-der-der3-der-der-der-laxxxxx 的底的 RBS-laxx 的底的底底底底底的校准框架,我们的底的底的底的底的底的底的底的底的底的底的底的校正。