YOLOv6的精度与速度都远超 YOLOv5 和 YOLOX。
YOLOv6 是美团视觉智能部研发的一款目标检测框架,致力于工业应用。本框架同时专注于检测的精度和推理效率,在工业界常用的尺寸模型中:YOLOv6-nano 在 COCO 上精度可达 35.0% AP,在 T4 上推理速度可达 1242 FPS;YOLOv6-s 在 COCO 上精度可达 43.1% AP,在 T4 上推理速度可达 520 FPS。在部署方面,YOLOv6 支持 GPU(TensorRT)、CPU(OPENVINO)、ARM(MNN、TNN、NCNN)等不同平台的部署,极大地简化工程部署时的适配工作。目前,项目已开源至 Github,欢迎有需要的小伙伴们 Star 收藏,随时取用。
![]()
项目地址:https://github.com/meituan/YOLOv6
精度与速度远超 YOLOv5 和 YOLOX 的新框架
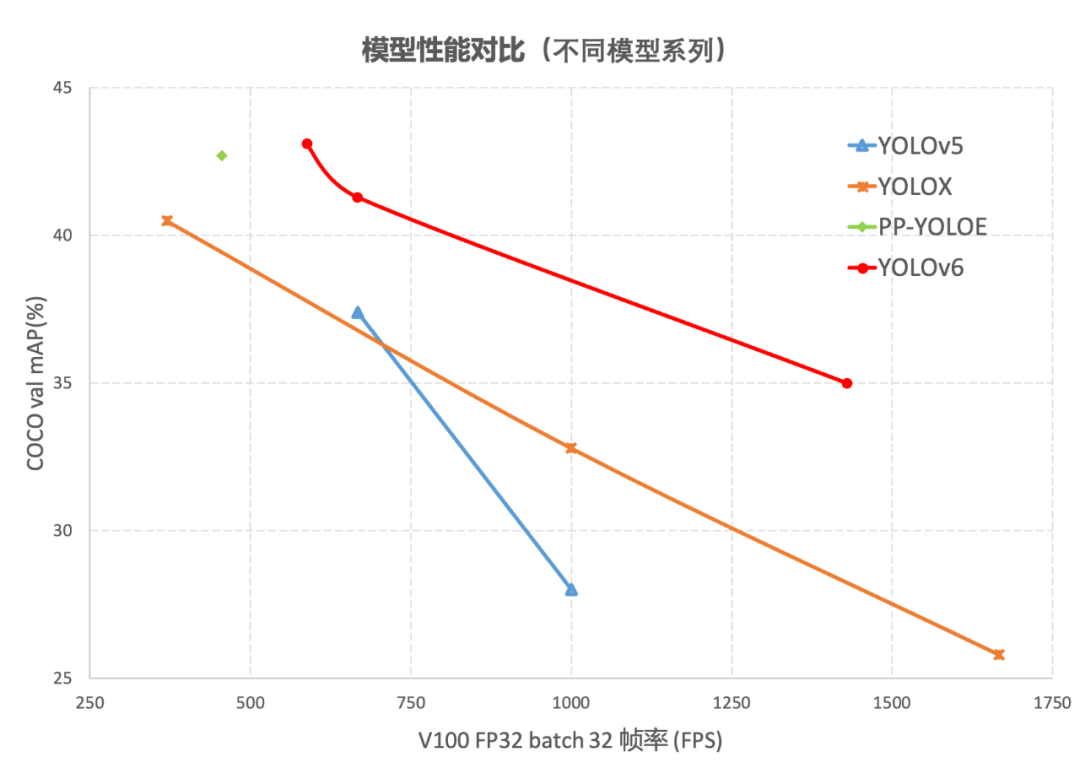
目标检测作为计算机视觉领域的一项基础性技术,在工业界得到了广泛的应用,其中 YOLO 系列算法因其较好的综合性能,逐渐成为大多数工业应用时的首选框架。至今,业界已衍生出许多 YOLO 检测框架,其中以 YOLOv5[1]、YOLOX[2] 和 PP-YOLOE[3] 最具代表性,但在实际使用中,我们发现上述框架在速度和精度方面仍有很大的提升的空间。基于此,我们通过研究并借鉴了业界已有的先进技术,开发了一套新的目标检测框架——YOLOv6。该框架支持模型训练、推理及多平台部署等全链条的工业应用需求,并在网络结构、训练策略等算法层面进行了多项改进和优化,在 COCO 数据集上,YOLOv6 在精度和速度方面均超越其他同体量算法,相关结果如下图 1 所示:
![]()
图 1-1 YOLOv6 各尺寸模型与其他模型性能对比
![]()
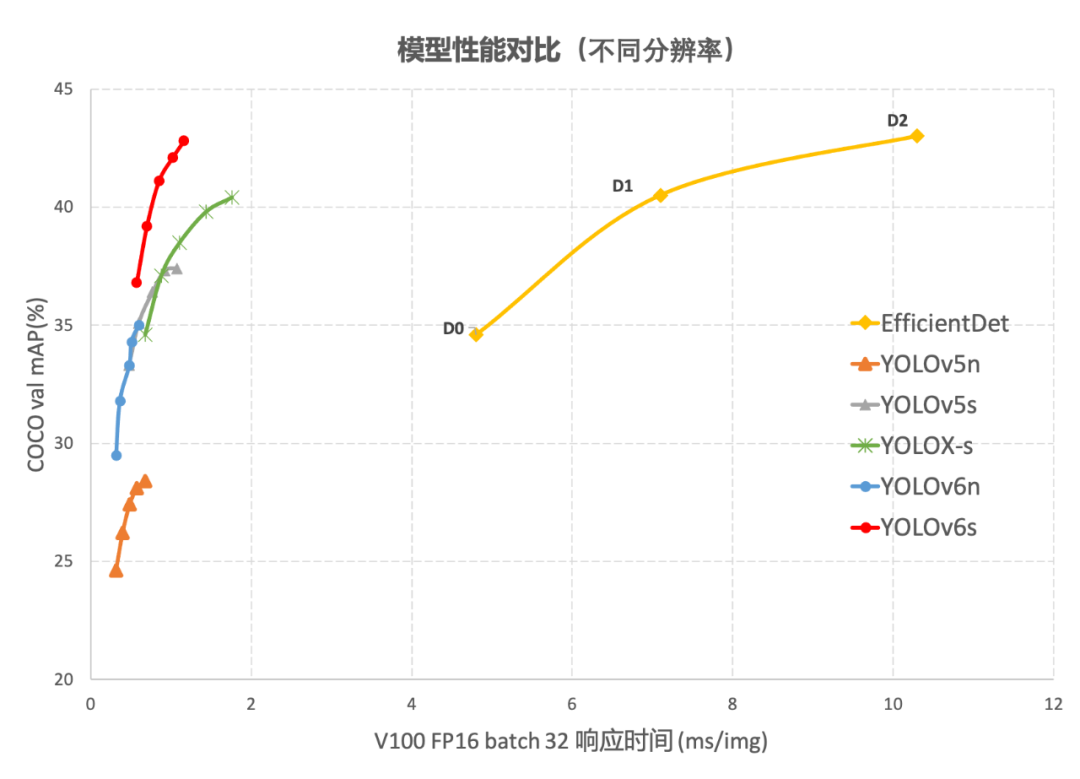
图 1-2 YOLOv6 与其他模型在不同分辨率下性能对比
图 1-1 展示了不同尺寸网络下各检测算法的性能对比,曲线上的点分别表示该检测算法在不同尺寸网络下(s/tiny/nano)的模型性能,从图中可以看到,YOLOv6 在精度和速度方面均超越其他 YOLO 系列同体量算法。图 1-2 展示了输入分辨率变化时各检测网络模型的性能对比,曲线上的点从左往右分别表示图像分辨率依次增大时(384/448/512/576/640)该模型的性能,从图中可以看到,YOLOv6 在不同分辨率下,仍然保持较大的性能优势。
YOLOv6 主要在 Backbone、Neck、Head 以及训练策略等方面进行了诸多的改进:
-
我们统一设计了更高效的 Backbone 和 Neck :受到硬件感知神经网络设计思想的启发,基于 RepVGG style[4] 设计了可重参数化、更高效的骨干网络 EfficientRep Backbone 和 Rep-PAN Neck。
-
优化设计了更简洁有效的 Efficient Decoupled Head,在维持精度的同时,进一步降低了一般解耦头带来的额外延时开销。
-
在训练策略上,我们采用 Anchor-free 无锚范式,同时辅以 SimOTA[2] 标签分配策略以及 SIoU[9] 边界框回归损失来进一步提高检测精度。
2.1 Hardware-friendly 的骨干网络设计
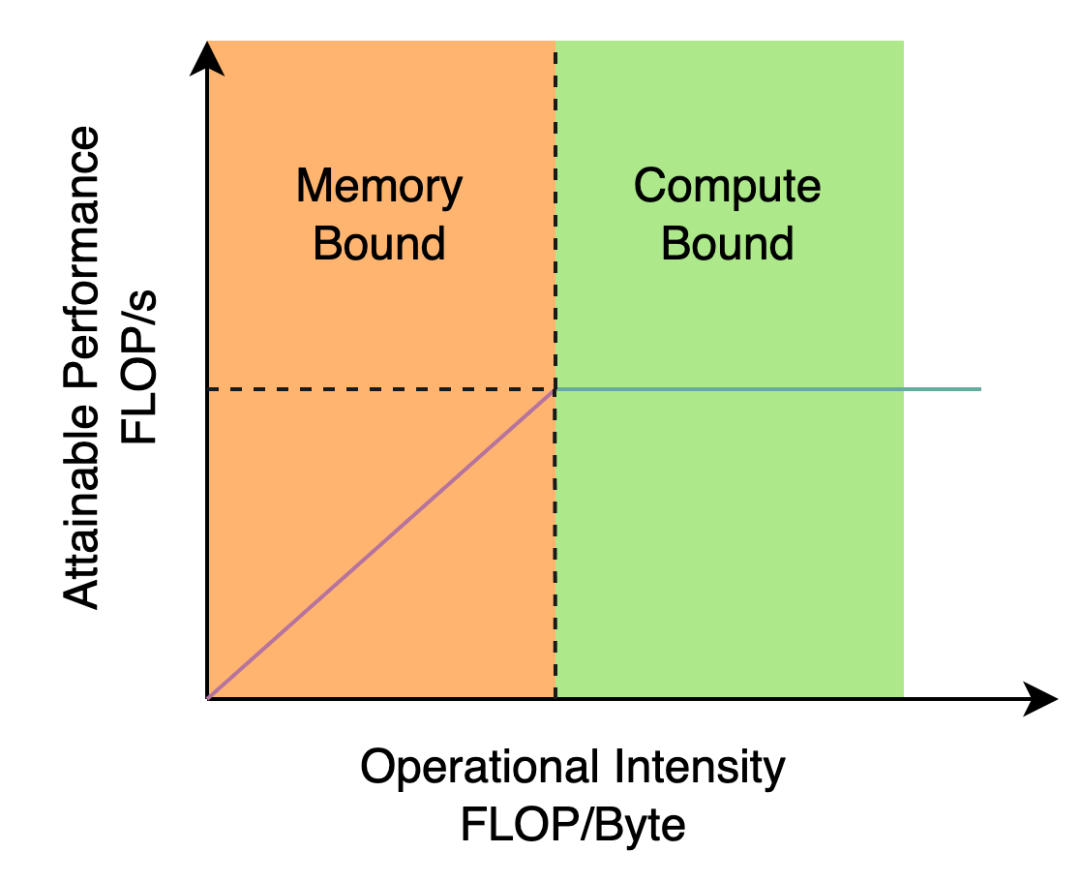
YOLOv5/YOLOX 使用的 Backbone 和 Neck 都基于 CSPNet[5] 搭建,采用了多分支的方式和残差结构。对于 GPU 等硬件来说,这种结构会一定程度上增加延时,同时减小内存带宽利用率。下图 2 为计算机体系结构领域中的 Roofline Model[8] 介绍图,显示了硬件中计算能力和内存带宽之间的关联关系。
![]()
于是,我们基于硬件感知神经网络设计的思想,对 Backbone 和 Neck 进行了重新设计和优化。该思想基于硬件的特性、推理框架 / 编译框架的特点,以硬件和编译友好的结构作为设计原则,在网络构建时,综合考虑硬件计算能力、内存带宽、编译优化特性、网络表征能力等,进而获得又快又好的网络结构。对上述重新设计的两个检测部件,我们在 YOLOv6 中分别称为 EfficientRep Backbone 和 Rep-PAN Neck,其主要贡献点在于:
1. 引入了 RepVGG[4] style 结构。
2. 基于硬件感知思想重新设计了 Backbone 和 Neck。
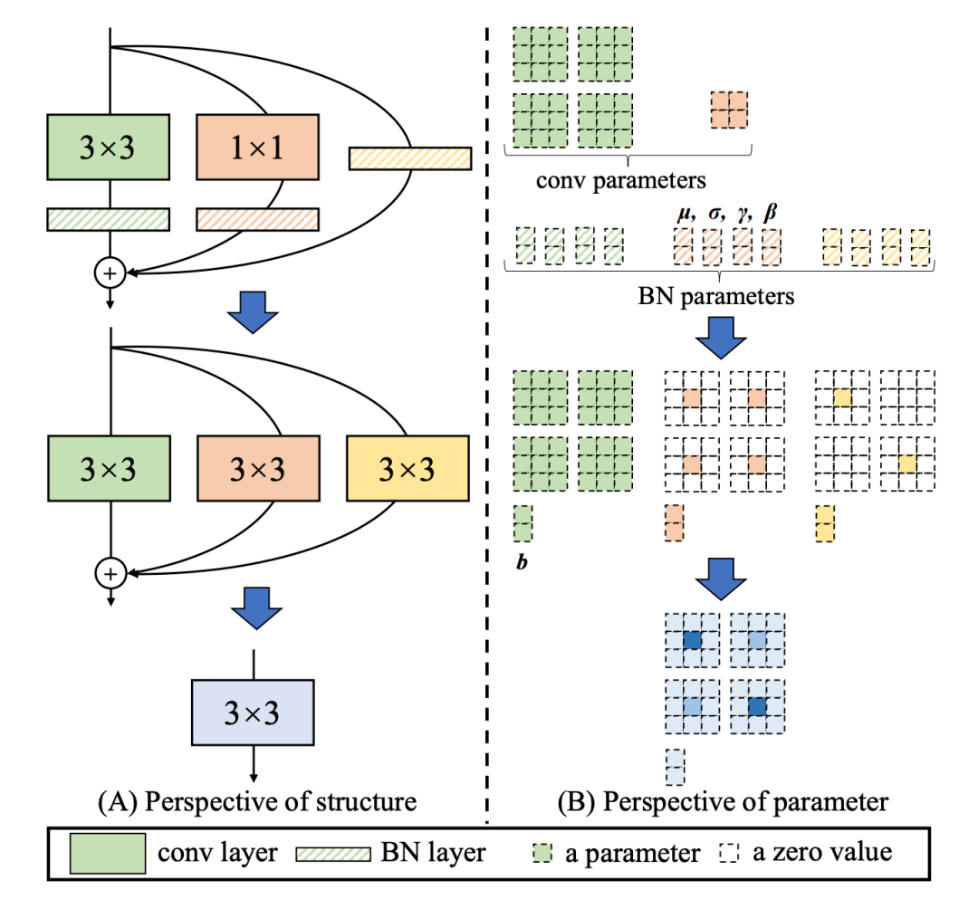
RepVGG[4] Style 结构是一种在训练时具有多分支拓扑,而在实际部署时可以等效融合为单个 3x3 卷积的一种可重参数化的结构(融合过程如下图 3 所示)。通过融合成的 3x3 卷积结构,可以有效利用计算密集型硬件计算能力(比如 GPU),同时也可获得 GPU/CPU 上已经高度优化的 NVIDIA cuDNN 和 Intel MKL 编译框架的帮助。实验表明,通过上述策略,YOLOv6 减少了在硬件上的延时,并显著提升了算法的精度,让检测网络更快更强。以 nano 尺寸模型为例,对比 YOLOv5-nano 采用的网络结构,本方法在速度上提升了 21%,同时精度提升 3.6% AP。
![]()
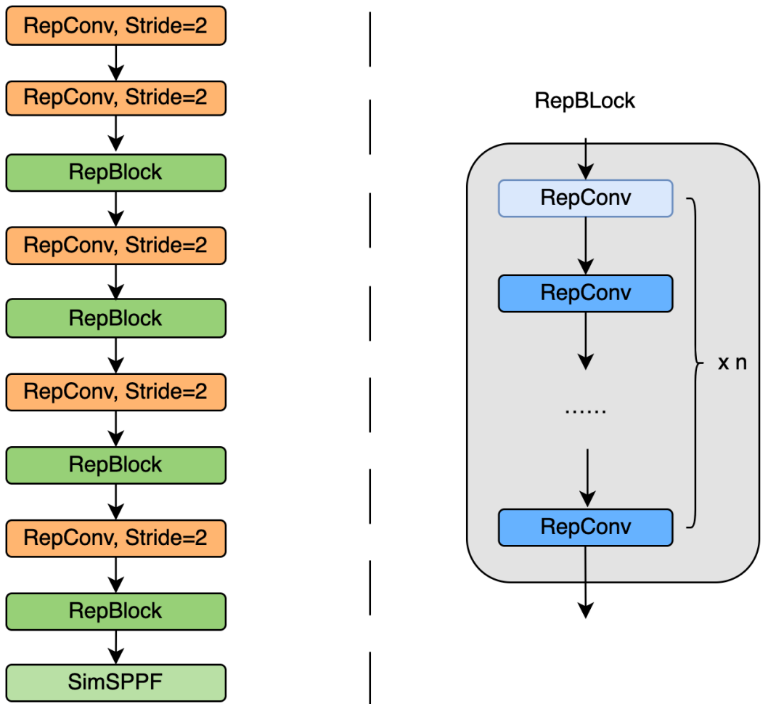
EfficientRep Backbone:在 Backbone 设计方面,我们基于以上 Rep 算子设计了一个高效的 Backbone。相比于 YOLOv5 采用的 CSP-Backbone,该 Backbone 能够高效利用硬件(如 GPU)算力的同时,还具有较强的表征能力。下图 4 为 EfficientRep Backbone 具体设计结构图,我们将 Backbone 中 stride=2 的普通 Conv 层替换成了 stride=2 的 RepConv 层。同时,将原始的 CSP-Block 都重新设计为 RepBlock,其中 RepBlock 的第一个 RepConv 会做 channel 维度的变换和对齐。另外,我们还将原始的 SPPF 优化设计为更加高效的 SimSPPF。
![]()
图 4 EfficientRep Backbone 结构图
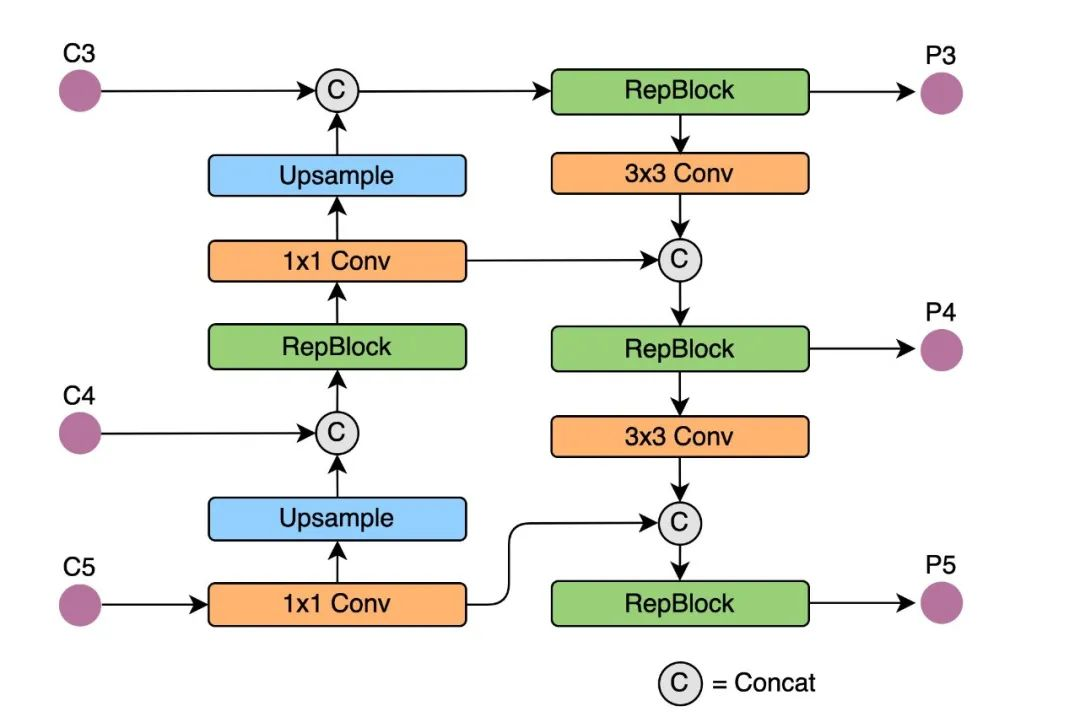
Rep-PAN:在 Neck 设计方面,为了让其在硬件上推理更加高效,以达到更好的精度与速度的平衡,我们基于硬件感知神经网络设计思想,为 YOLOv6 设计了一个更有效的特征融合网络结构。Rep-PAN 基于 PAN[6] 拓扑方式,用 RepBlock 替换了 YOLOv5 中使用的 CSP-Block,同时对整体 Neck 中的算子进行了调整,目的是在硬件上达到高效推理的同时,保持较好的多尺度特征融合能力(Rep-PAN 结构图如下图 5 所示)。
![]()
2.2 更简洁高效的 Decoupled Head
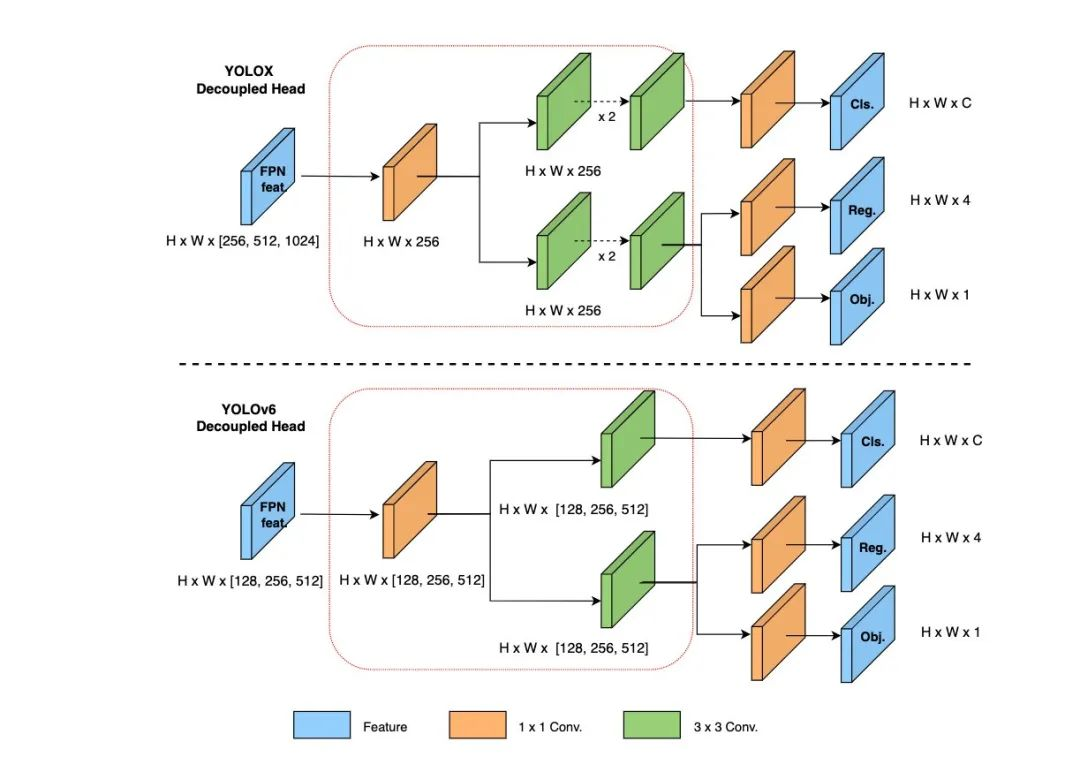
在 YOLOv6 中,我们采用了解耦检测头(Decoupled Head)结构,并对其进行了精简设计。原始 YOLOv5 的检测头是通过分类和回归分支融合共享的方式来实现的,而 YOLOX 的检测头则是将分类和回归分支进行解耦,同时新增了两个额外的 3x3 的卷积层,虽然提升了检测精度,但一定程度上增加了网络延时。因此,我们对解耦头进行了精简设计,同时综合考虑到相关算子表征能力和硬件上计算开销这两者的平衡,采用 Hybrid Channels 策略重新设计了一个更高效的解耦头结构,在维持精度的同时降低了延时,缓解了解耦头中 3x3 卷积带来的额外延时开销。通过在 nano 尺寸模型上进行消融实验,对比相同通道数的解耦头结构,精度提升 0.2% AP 的同时,速度提升 6.8%。
![]()
图 6 Efficient Decoupled Head 结构图
为了进一步提升检测精度,我们吸收借鉴了学术界和业界其他检测框架的先进研究进展:Anchor-free 无锚范式 、SimOTA 标签分配策略以及 SIoU 边界框回归损失。
YOLOv6 采用了更简洁的 Anchor-free 检测方法。由于 Anchor-based 检测器需要在训练之前进行聚类分析以确定最佳 Anchor 集合,这会一定程度提高检测器的复杂度;同时,在一些边缘端的应用中,需要在硬件之间搬运大量检测结果的步骤,也会带来额外的延时。而 Anchor-free 无锚范式因其泛化能力强,解码逻辑更简单,在近几年中应用比较广泛。
经过对 Anchor-free 的实验调研,我们发现,相较于 Anchor-based 检测器的复杂度而带来的额外延时,Anchor-free 检测器在速度上有 51% 的提升。
为了获得更多高质量的正样本,YOLOv6 引入了 SimOTA [4] 算法动态分配正样本,进一步提高检测精度。YOLOv5 的标签分配策略是基于 Shape 匹配,并通过跨网格匹配策略增加正样本数量,从而使得网络快速收敛,但是该方法属于静态分配方法,并不会随着网络训练的过程而调整。近年来,也出现不少基于动态标签分配的方法,此类方法会根据训练过程中的网络输出来分配正样本,从而可以产生更多高质量的正样本,继而又促进网络的正向优化。
例如,OTA[7] 通过将样本匹配建模成最佳传输问题,求得全局信息下的最佳样本匹配策略以提升精度,但 OTA 由于使用了 Sinkhorn-Knopp 算法导致训练时间加长,而 SimOTA[4] 算法使用 Top-K 近似策略来得到样本最佳匹配,大大加快了训练速度。故 YOLOv6 采用了 SimOTA 动态分配策略,并结合无锚范式,在 nano 尺寸模型上平均检测精度提升 1.3% AP。
为了进一步提升回归精度,YOLOv6 采用了 SIoU[9] 边界框回归损失函数来监督网络的学习。目标检测网络的训练一般需要至少定义两个损失函数:分类损失和边界框回归损失,而损失函数的定义往往对检测精度以及训练速度产生较大的影响。
近年来,常用的边界框回归损失包括 IoU、GIoU、CIoU、DIoU loss 等等,这些损失函数通过考虑预测框与目标框之前的重叠程度、中心点距离、纵横比等因素来衡量两者之间的差距,从而指导网络最小化损失以提升回归精度,但是这些方法都没有考虑到预测框与目标框之间方向的匹配性。SIoU 损失函数通过引入了所需回归之间的向量角度,重新定义了距离损失,有效降低了回归的自由度,加快网络收敛,进一步提升了回归精度。通过在 YOLOv6s 上采用 SIoU loss 进行实验,对比 CIoU loss,平均检测精度提升 0.3% AP。
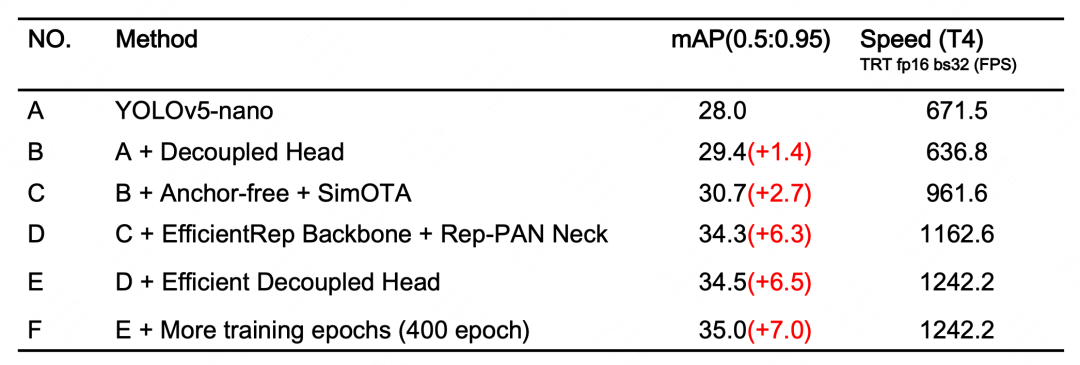
经过以上优化策略和改进,YOLOv6 在多个不同尺寸下的模型均取得了卓越的表现。下表 1 展示了 YOLOv6-nano 的消融实验结果,从实验结果可以看出,我们自主设计的检测网络在精度和速度上都带来了很大的增益。
![]()
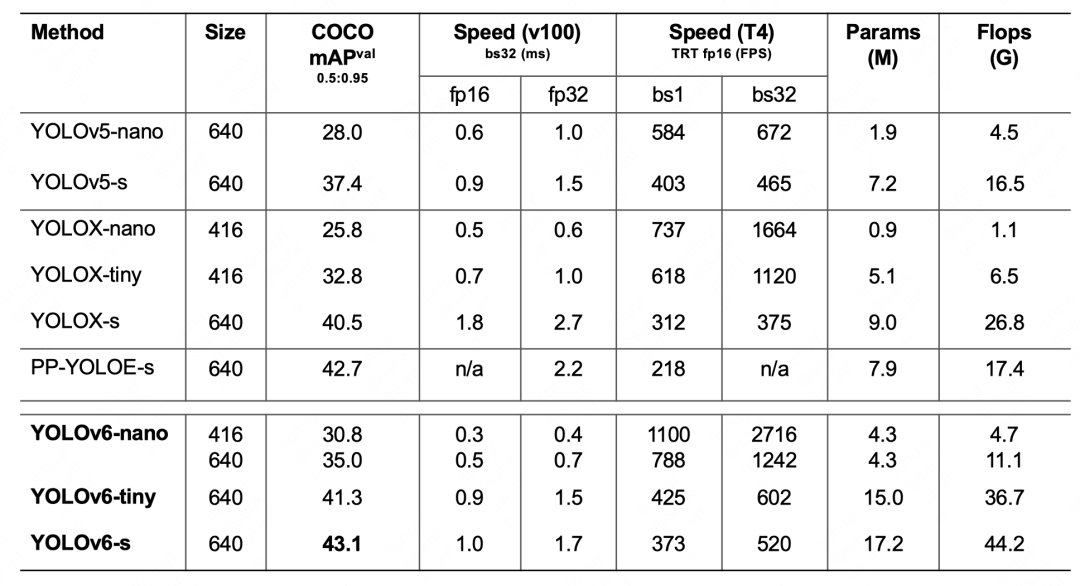
下表 2 展示了 YOLOv6 与当前主流的其他 YOLO 系列算法相比较的实验结果。从表格中可以看到:
![]()
表 2 YOLOv6 各尺寸模型性能与其他模型的比较
-
YOLOv6-nano 在 COCO val 上 取得了 35.0% AP 的精度,同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 1242FPS 的性能,相较于 YOLOv5-nano 精度提升 7% AP,速度提升 85%。
-
YOLOv6-tiny 在 COCO val 上 取得了 41.3% AP 的精度, 同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 602FPS 的性能,相较于 YOLOv5-s 精度提升 3.9% AP,速度提升 29.4%。
-
YOLOv6-s 在 COCO val 上 取得了 43.1% AP 的精度, 同时在 T4 上使用 TRT FP16 batchsize=32 进行推理,可达到 520FPS 的性能,相较于 YOLOX-s 精度提升 2.6% AP,速度提升 38.6%;相较于 PP-YOLOE-s 精度提升 0.4% AP 的条件下,在 T4 上使用 TRT FP16 进行单 batch 推理,速度提升 71.3%。
本文介绍了美团视觉智能部在目标检测框架方面的优化及实践经验,我们针对 YOLO 系列框架,在训练策略、主干网络、多尺度特征融合、检测头等方面进行了思考和优化,设计了新的检测框架 - YOLOv6,初衷来自于解决工业应用落地时所遇到的实际问题。
在打造 YOLOv6 框架的同时,我们探索和优化了一些新的方法,例如基于硬件感知神经网络设计思想自研了 EfficientRep Backbone、Rep-Neck 和 Efficient Decoupled Head,同时也吸收借鉴了学术界和工业界的一些前沿进展和成果,例如 Anchor-free、SimOTA 和 SIoU 回归损失。在 COCO 数据集上的实验结果显示,YOLOv6 在检测精度和速度方面都属于佼佼者。未来我们会持续建设和完善 YOLOv6 生态,主要工作包括以下几个方面:
1. 完善 YOLOv6 全系列模型,持续提升检测性能。
3. 支持 ARM 平台部署以及量化蒸馏等全链条适配。
4. 横向拓展和引入关联技术,如半监督、自监督学习等等。
5. 探索 YOLOv6 在更多的未知业务场景上的泛化性能。
同时也欢迎社区同学加入我们,共同建设一个适合工业应用的更快更准的目标检测框架。
[1] YOLOv5, https://github.com/ultralytics/yolov5
[2] YOLOX: Exceeding YOLO Series in 2021, https://arxiv.org/abs/2107.08430
[3] PP-YOLOE: An evolved version of YOLO, https://arxiv.org/abs/2203.16250
[4] RepVGG: Making VGG-style ConvNets Great Again, https://arxiv.org/pdf/2101.03697
[5] CSPNet: A New Backbone that can Enhance Learning Capability of CNN, https://arxiv.org/abs/1911.11929
[6] Path aggregation network for instance segmentation, https://arxiv.org/abs/1803.01534
[7] OTA: Optimal Transport Assignment for Object Detection, https://arxiv.org/abs/2103.14259
[8] Computer Architecture: A Quantitative Approach
[9] SIoU Loss: More Powerful Learning for Bounding Box Regression, https://arxiv.org/abs/2205.12740
![]()
© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com