最新汇总:一些基于深度学习的视觉里程计/SLAM开源代码
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文由自动驾驶科学家 黄浴老师授权转载,禁止二次转载。原文:
https://zhuanlan.zhihu.com/p/139150194
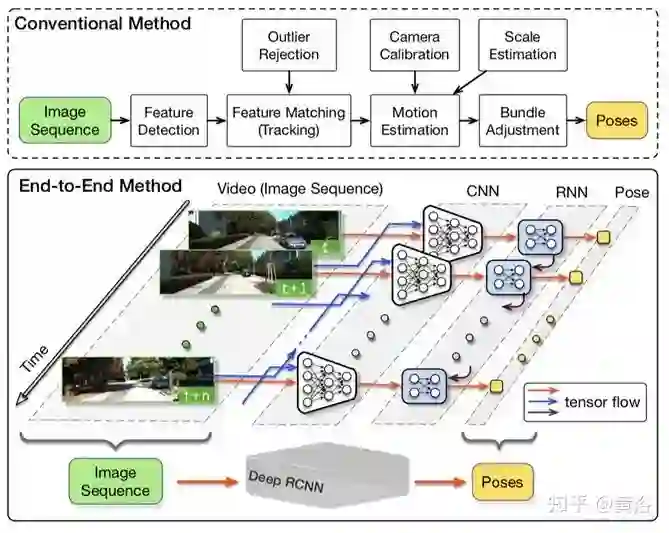
这里重点是摄像头运动估计和定位,不是地图或者路标(landmark)。以前大家都知道SLAM结合深度学习最多的是语义SLAM,比如语义分割和语义目标识别。而这里强调的是里程计和定位。另外,忽略一些特征提取和匹配的方法。
DEMON
https://github.com/lmb-freiburg/demon github.com
其方法如图所示


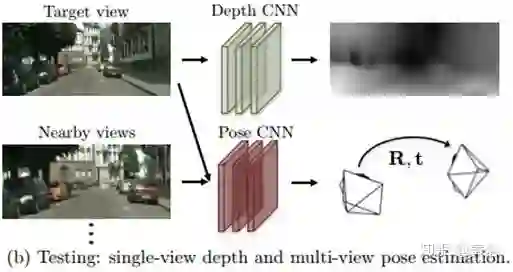
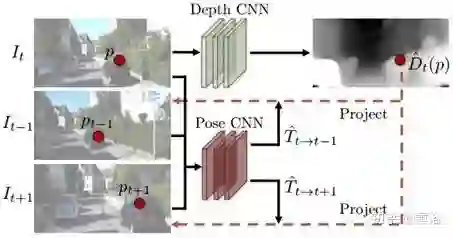
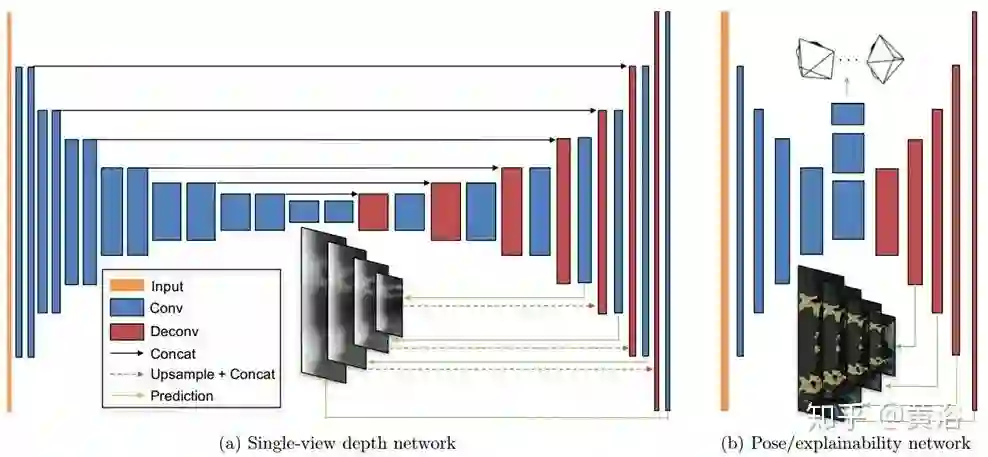
2. SfM Learner
https://github.com/tinghuiz/SfMLearner github.com
方法如图

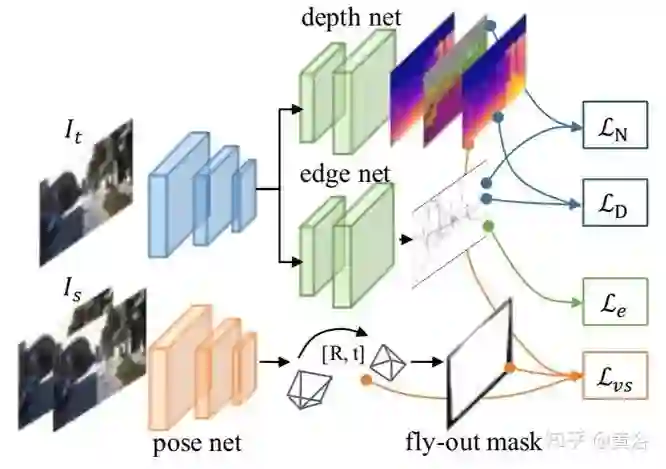
3. LEGO
zhenheny/LEGO github.com
方法如图
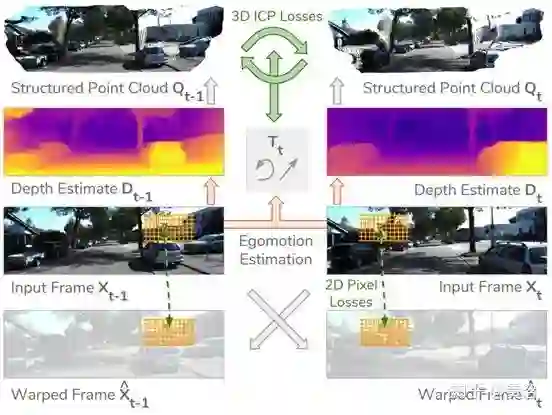
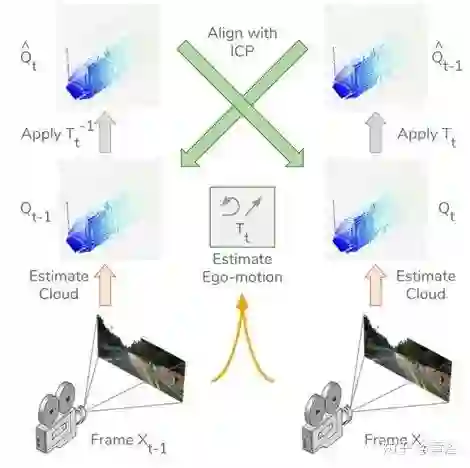
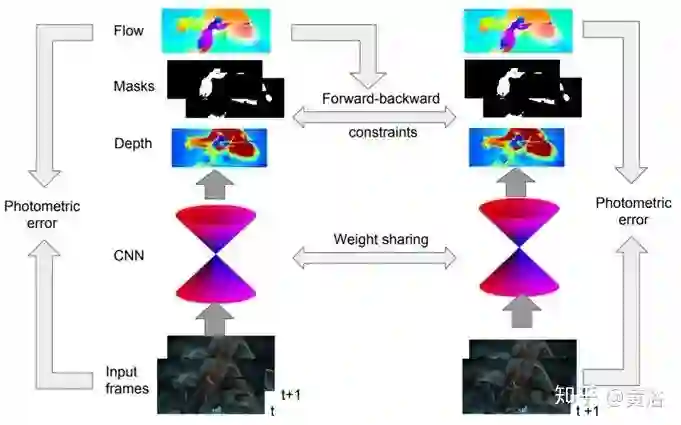
4. Vid2Depth
https://sites.google.com/view/vid2depth sites.google.com
方法如图
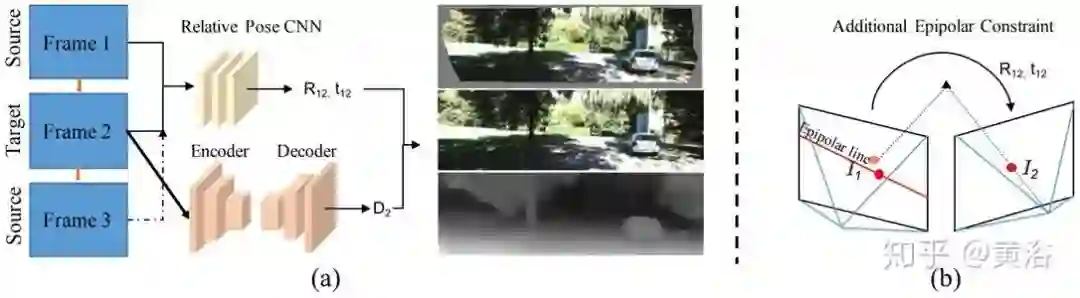
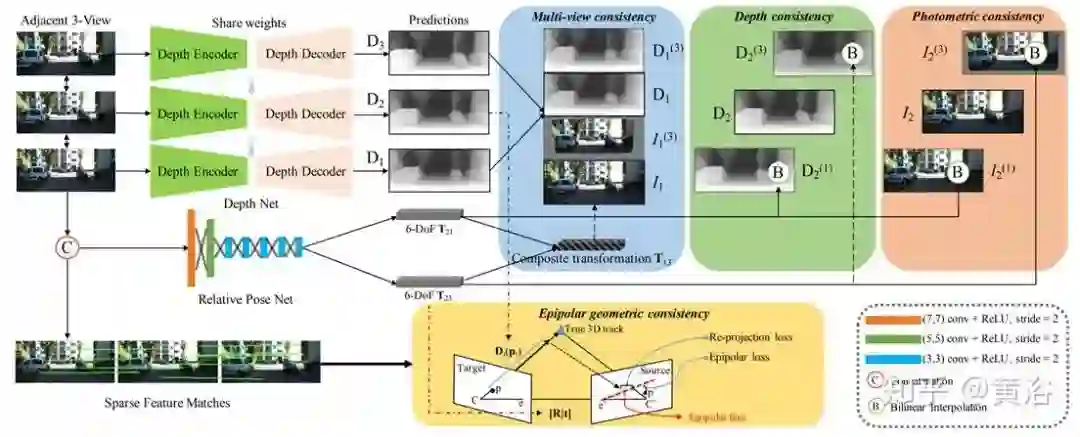
5. DeepMatchVO
https://github.com/hlzz/DeepMatchVO github.com
方法如图
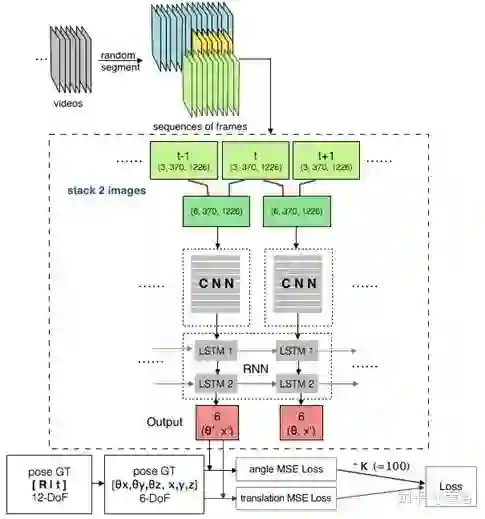
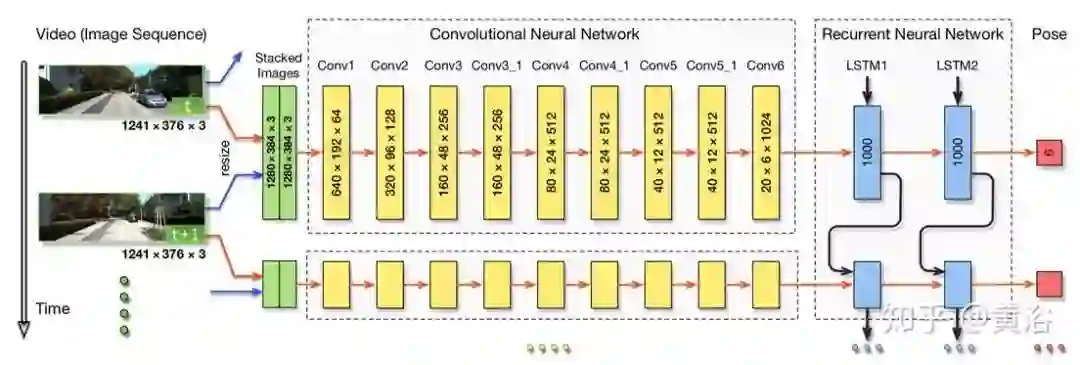
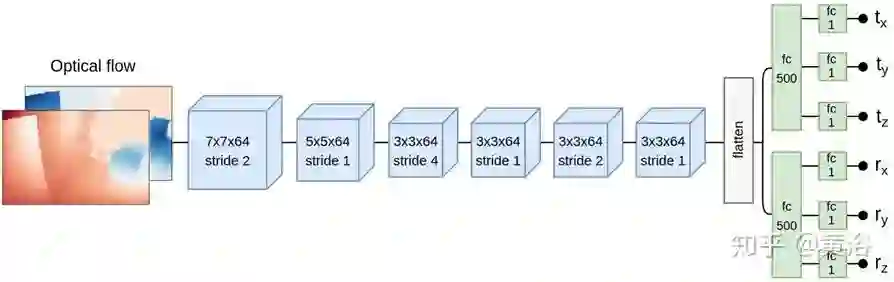
6. DeepVO
ChiWeiHsiao/DeepVO-pytorch github.com
krrish94/DeepVO github.com
方法如图
7. DDVO
https://github.com/MightyChaos/LKVOLearner github.com
方法如图

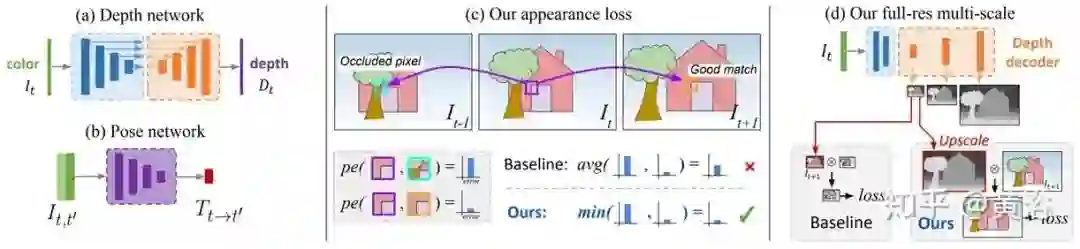
8. MonoDepth2
https://github.com/nianticlabs/monodepth2 github.com
方法如图
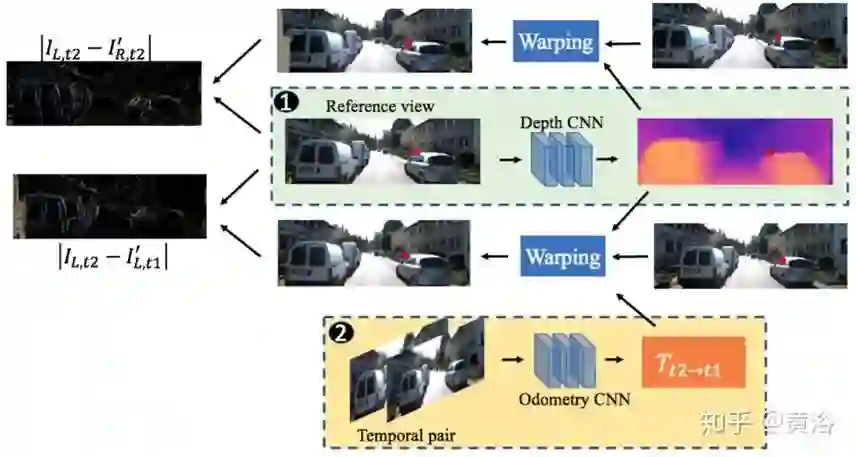
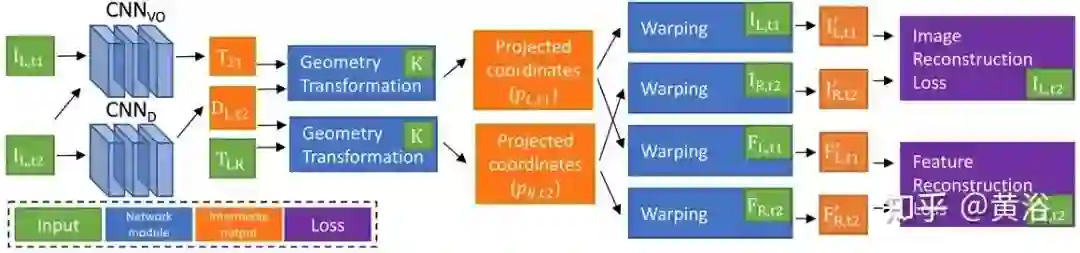
9. Depth VO Feat
Huangying-Zhan/Depth-VO-Feat github.com
方法如图
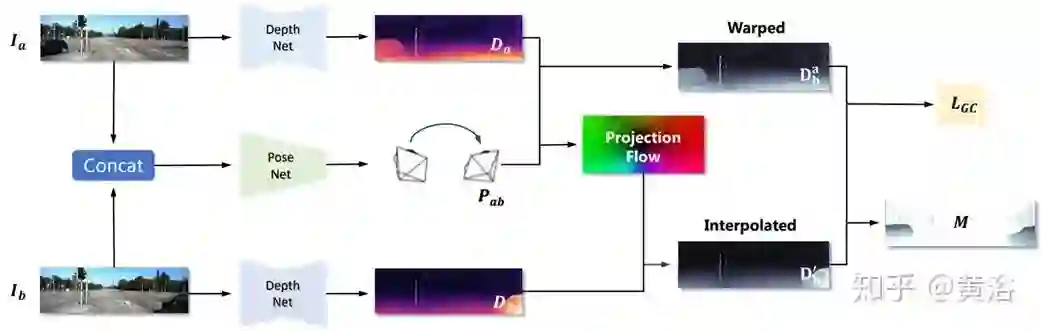
10. SC SfM Learner
https://github.com/JiawangBian/SC-SfMLearner-Release github.com
方法如图
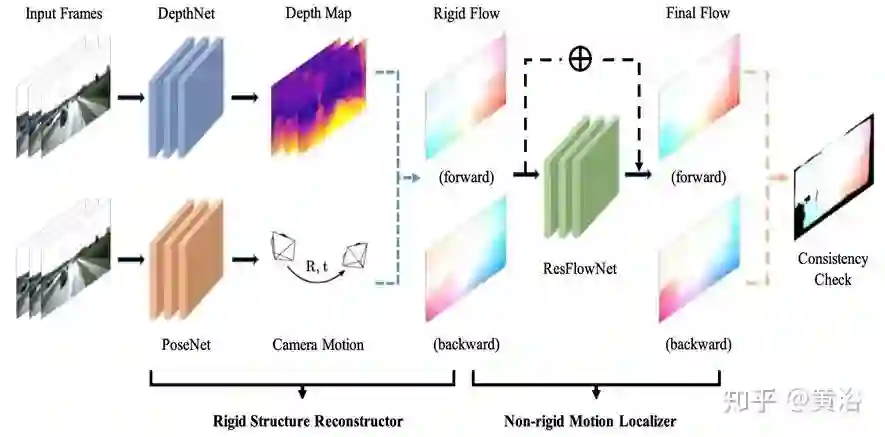
11. GeoNet
https://github.com/yzcjtr/GeoNet github.com
方法如图
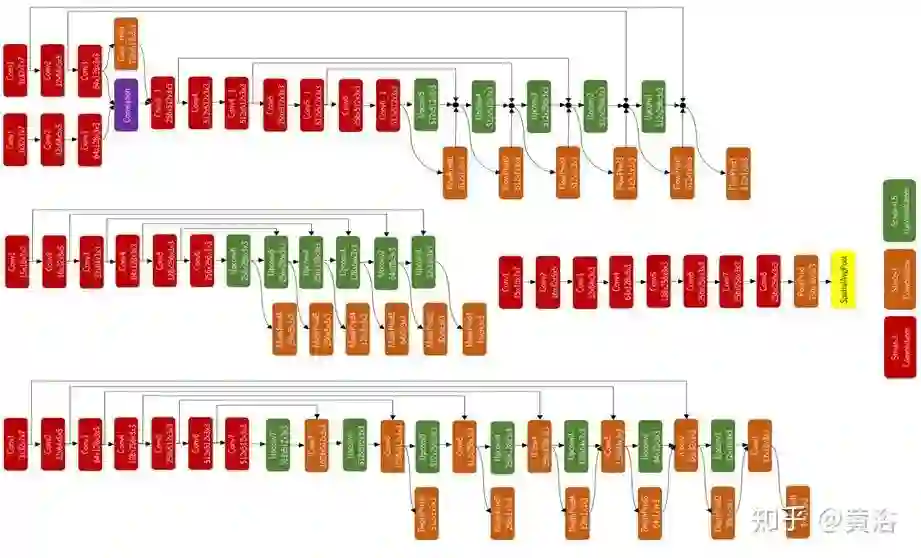
12. Nvidia CC
anuragranj/cc github.com
方法如图

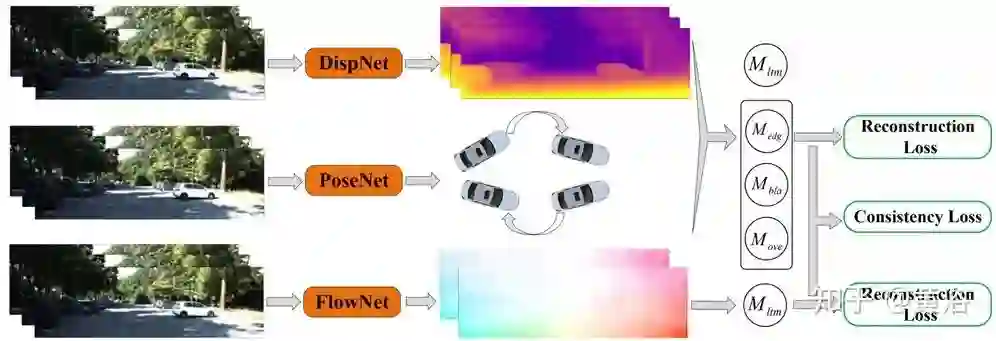
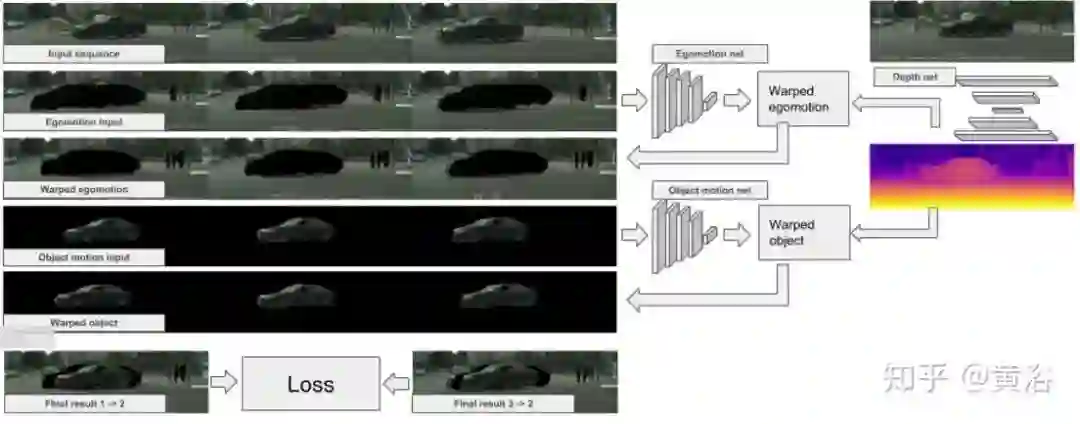
13. DOP Learning
guangmingw/DOPlearning github.com
方法如图
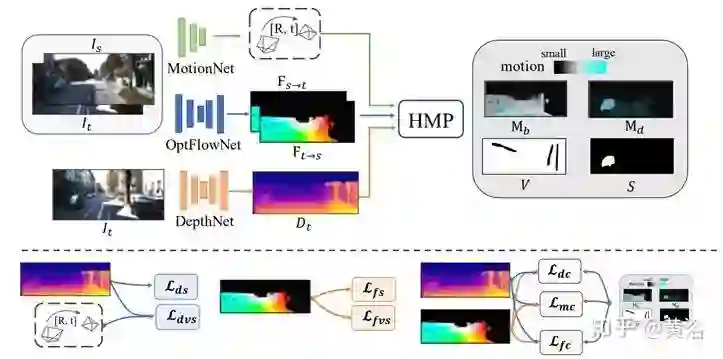
14. EPC
chenxuluo/EPC github.com
方法如图
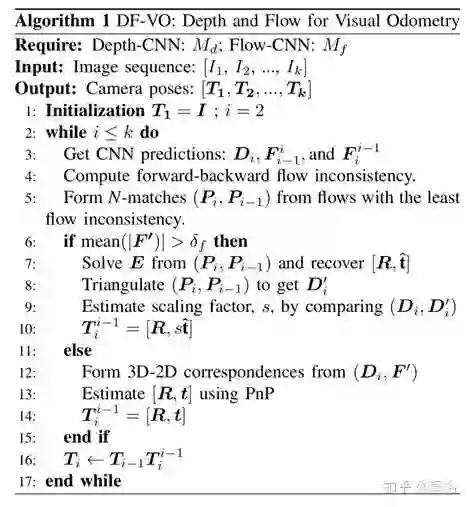
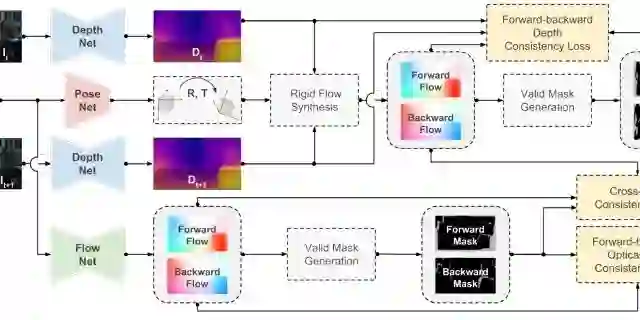
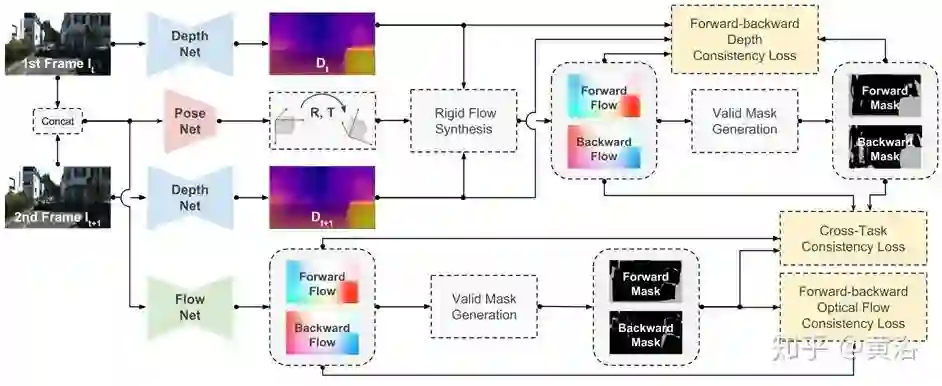
15. DF-VO
Huangying-Zhan/DF-VO github.com
算法如图
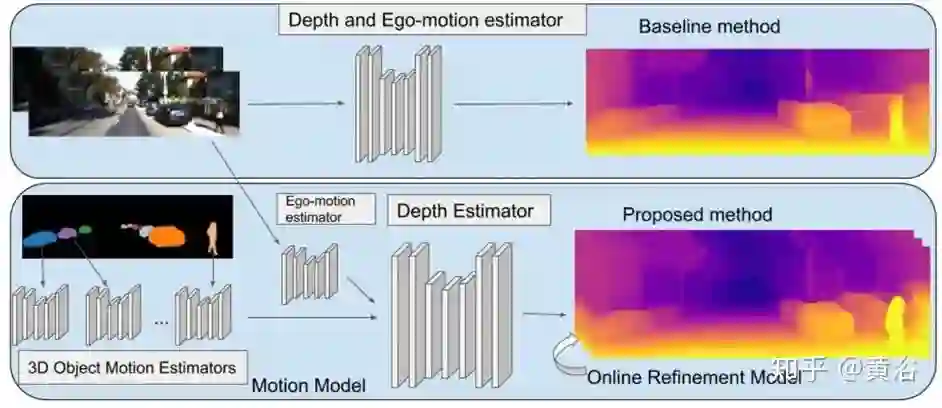
16. struct2depth
https://sites.google.com/view/struct2depth sites.google.com
方法如图
17. DF-Net
DF-Net
yuliang.vision
方法如图
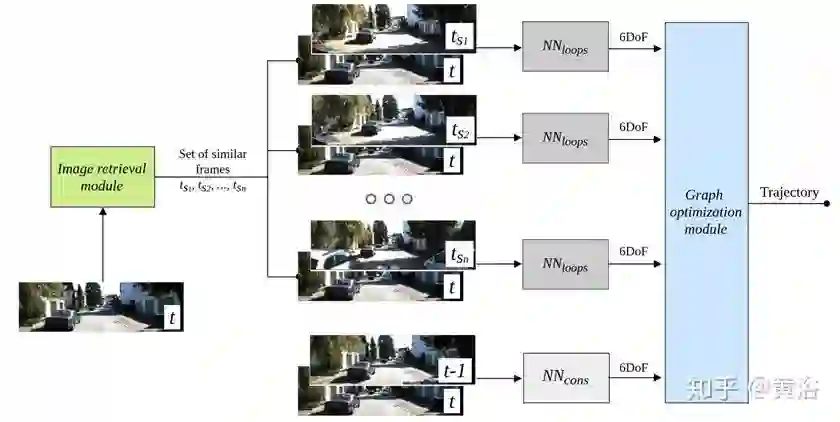
18. Samsung Odometry
saic-vul/odometry github.com
方法如图
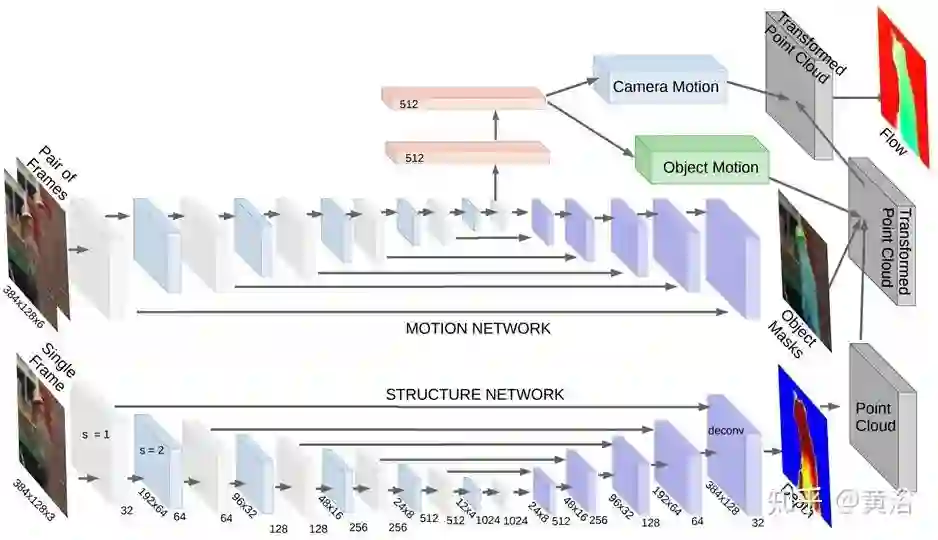
19. SfM-Net
augustelalande/sfm github.com
方法如图
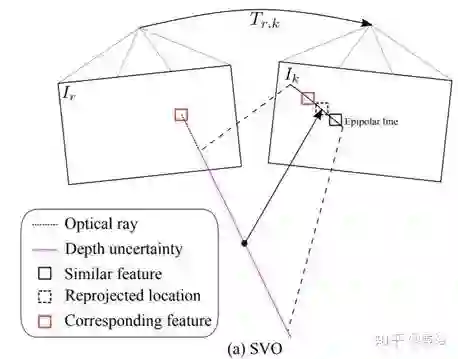
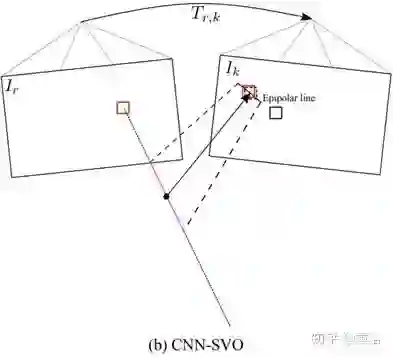
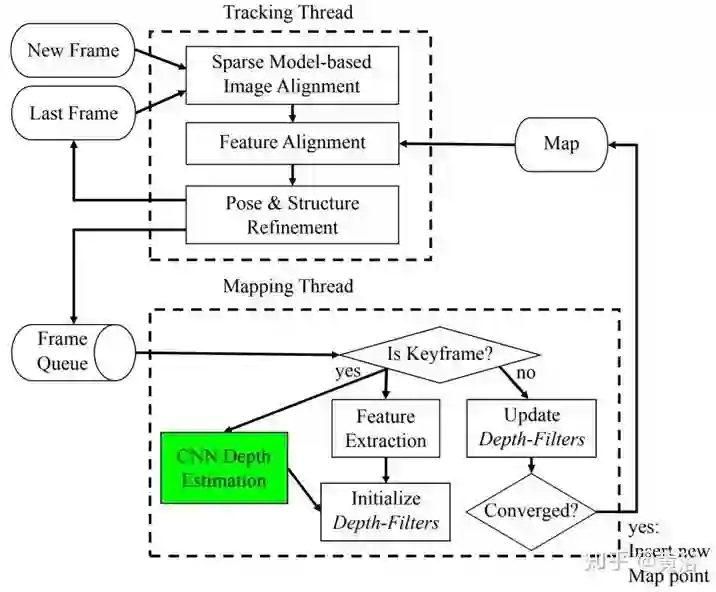
20. CNN-SVO
https://github.com/yan99033/CNN-SVO github.com
方法如图
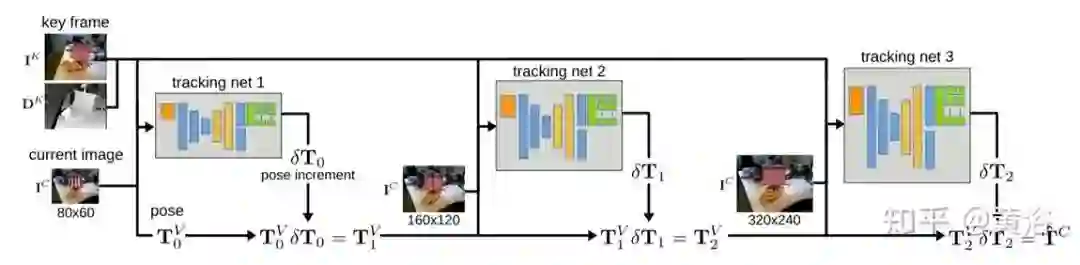
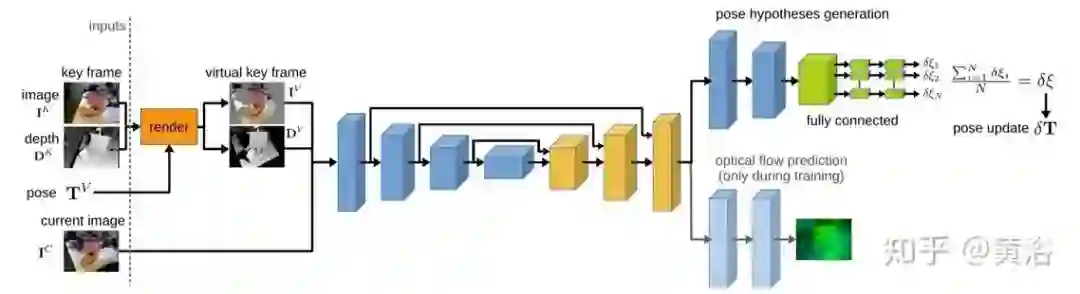
21. DeepTAM
https://github.com/lmb-freiburg/deeptam github.com
方法如图
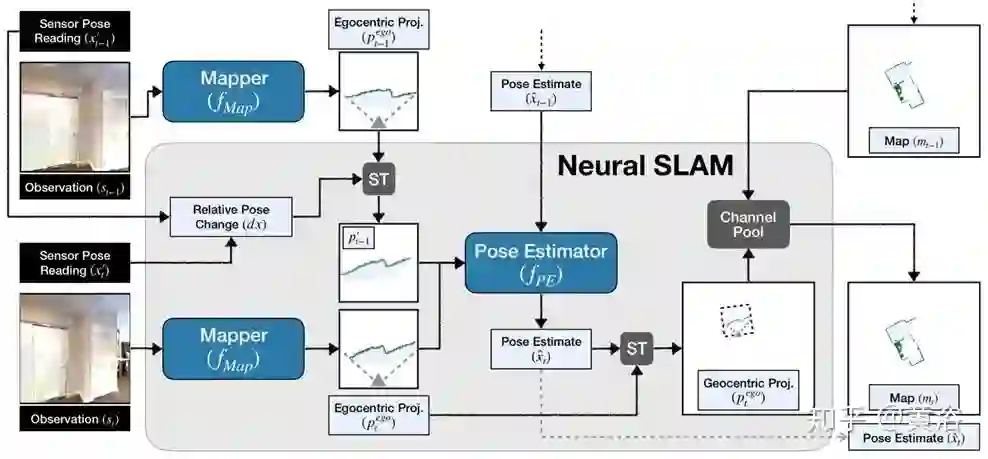
22. Active Neural SLAM
https://github.com/devendrachaplot/Neural-SLAM github.com
方法如图

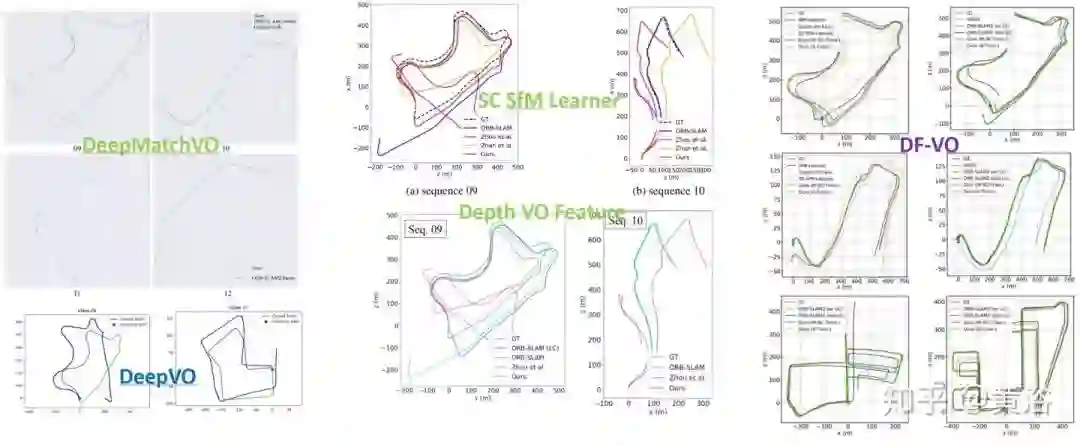
关于性能比较,除了题目上方的误差比较表格,这里再附上一个轨迹比较图:
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
不错哦,点个赞

相关内容

http://Gitlab.com
国内类似服务:
http://Coding.net




