【CAA智库】陈杰院士:有人/无人系统自主协同的关键科学问题

有人/无人系统的自主协同是一项可能对未来战争模式产生颠覆性变革的重要技术. 《中国科学:信息科学》第9期发表的陈杰院士观点文章, 分别从系统、决策、控制与安全4个层面分析了有人/无人系统自主协同研究面临的各种挑战和重要科学问题.
引 言
有人/无人自主协同是指有人系统与无人系统之间在组织、决策、规划、控制、感知等方面既各自进行独立的计算、存储、处理, 又通过自发且平等的交互共融, 达成共同目标的群体行为.
与单纯的无人系统相比, 在有人/无人自主协同系统中, 人类智能与机器智能的平行交互与融合有利于实现有人系统与无人系统的双向互补, 使系统在执行复杂任务时能够更好地适应人类目标导向而产生更优的性能. 人/机智能的差异性直接导致两类系统的行为差异性. 无人系统因无人化而便于实现灵活的设计, 容易实现功能的多样化, 尤其适合执行繁琐、危险的任务. 另外, 为适应人类特点而设计的有人系统在结构上与具有同等功能的无人系统也往往存在显著的差异, 从而进一步导致两类系统在性能上的差异. 两类系统在智能与行为、功能与性能上的差异性是有人/无人自主协同产生双向互补性的重要基础.
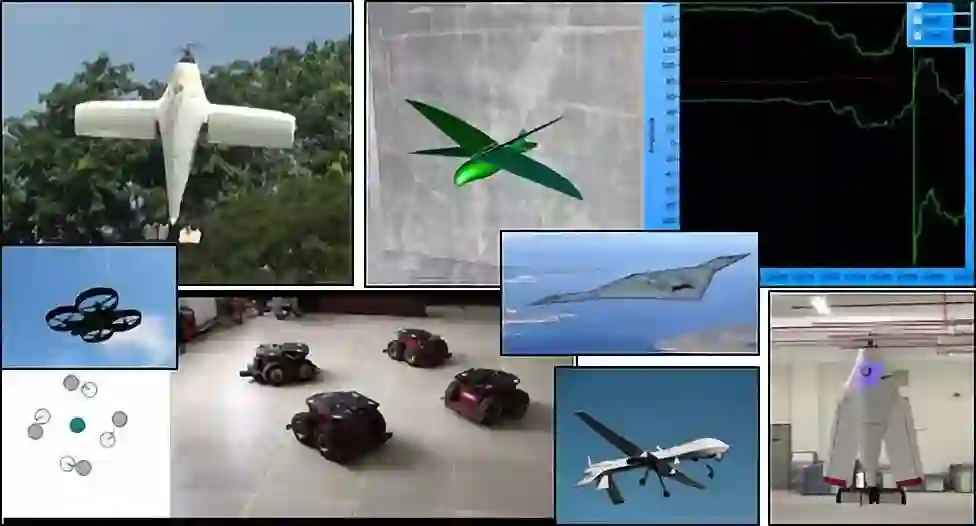
有人/无人自主协同技术被美军视为一项重要的颠覆性技术. 根据美国国防部《2011–2036年无人系统综合路线图》, 截止2010年9月, 美军在伊拉克和阿富汗战场总计投入约8000个无人地面平台, 在超过125000个任务中使用. 有人/无人平台协同正在成为地面作战的主要模式.
美国国防部《2013–2038年无人系统综合路线图》中指出: “在美国全球战略重心重返亚太地区的态势下, 建立有人/无人协同系统MUM-T成为美国国防部的必要使命”. 美国安全研究中心于2014年1月发布《为机器人时代的战争做准备》, 其中指出: “未来将在没有作战人员干涉的情况下自主选择并打击目标, 进而催生出自主作战概念”. 美军在无人平台投入使用的初期, 有人/无人平台在共同作战中暴露出了组织混乱、控制不力、行动盲目等严重问题, 其根本原因在于有人/无人系统的自主协同缺乏控制和优化的有效机制. 无人装备已成为我军陆用武器发展的重要方向,已应用于反恐、维稳、排爆、侦察. 随着无人化装备投入使用, 在体系对抗的现代战争中, 逐渐形成了有人/无人共同作战的模式.
有人/无人系统协同技术大致分为有人/无人遥控、有人/无人半自主协同、有人/无人自主协同3个阶段. 在有人/无人遥控模式下, 无人平台没有自主性, 决策与行为完全依靠有人平台. 在有人/无人半自主协同模式下, 无人平台自主完成行为操作, 有人平台完成复杂决策操作. 在高级的有人/无人自主协同模式下, 有人/无人平台功能对等, 协同关系自发形成且强度动态可调.
随着有人/无人系统的规模不断增大, 节点各异性突出, 以往的指控系统无法有效地自组织和管控作战单元. 仅依靠机器智能还无法高效指挥有人/无人系统的自主协同.无人平台的行为控制能力还无法自主应对苛刻的战场环境. 有人/无人系统的潜在对手的攻击和干扰手段多样, 安全性面临严重考验.
有人/无人系统的自主协同对分布式智能优化与控制提出了迫切需求, 主要体现在4个方面:
动态、抗毁、自组织的有人/无人控制系统架构;
实时、高效、团队化的有人/无人协调指挥决策;
稳定、一致、高精度的有人/无人合作行为控制;
安全、容错、抗攻击的有人/无人协同控制系统.
对应于上述需求, 主要的研究挑战表现在:
大规模异构节点与有人/无人系统自主协同的高动态、自组织之间的矛盾;
有人/无人系统自主协同的局部信息获取与全局最优决策之间的矛盾;
人/机智能深度融合与分布式自治系统稳定性之间的矛盾;
分布式系统结构的灵活性与系统控制的安全性之间的矛盾.
上述研究挑战蕴含了有人/无人自主协同的4个层面的科学问题:
系统层面: 有人/无人自主协同的组织架构和协同模式;
决策层面: 有人/无人自主协同的任务分配与行为规划;
控制层面: 有人/无人自主协同的合作行为控制;
安全层面: 有人/无人自主协同的安全指挥控制.
这4个层面之间的逻辑关系如下图所示, 其中系统层面通过体系架构的限定作用对决策和控制形成了约束, 同时对信息安全层面的问题具有诱导作用; 安全层面对整个系统的信息安全具有支撑作用, 对决策与控制过程形成信息保护; 决策层面对控制层面具有引导作用, 而控制层面主要是对决策的实现, 同时对决策层面也具有一定的约束作用.
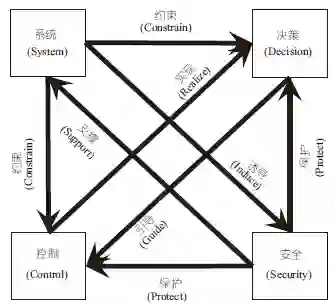
有人/无人自主协同系统4个层面的逻辑关系
组织架构和协同模式
有人/无人平台差异性大、任务需求各异, 急需建立面向协同任务的自主编配模式. 有人/无人平台种类繁多、模型各异、区域分散, 亟需形成有序、扁平化的指挥体系. 任务复杂、多变, 环境困难、恶劣, 因此指挥体系必须具有灵活性与抗毁性.
需解决的基础问题包括:
面向任务的协同能力建模与自主编配规则建立;
局部信息获取条件下, 指控系统体系结构优化设计;
指挥控制体系的抗毁性和动态可重构架构设计.
涉及的关键技术包括:
面向任务协同能力建模与自主编配;
核心子网的选取与静态层次型体系结构;
动态重组及抗毁性设计.
实际对象的物理特性复杂、多变, 对象的物理特性对于协同能力的影响, 对于自主决策的影响, 以及对于体系结构的影响还需要精确刻画. 需要将有人/无人能力模型设计、体系结构设计与实际对象的物理特性相结合, 体现设计与实际对象的物理特性的统一.
任务分配与行为规划
有人/无人系统中个体的智能水平和自主程度不同, 难以统一指挥, 亟需形成规则化、高效能的协调框架. 作战任务复杂、多变, 作战环境困难、恶劣, 战场信息来源众多、不完整, 亟需提高有人/无人系统指挥决策系统的协调性和快速响应能力.
需解决的基础问题包括:
针对动态、复杂的协调指挥决策, 设计合理的决策知识体系和智能表征模式;
针对有人系统与无人系统的团队化协调指挥, 设计出分布式协调任务分配与指挥决策机制.
涉及的关键技术包括:
协同指挥知识体系及智能表征模式;
基于角色知识的有人/无人协调指挥.
对信息获取的不确定性与不精确性考虑不够. 为了实现跨领域知识共享和协同推理判断能力, 需要建立协同态势感知与态势共享机制, 构建有人/无人双向自然交互, 将人的心理模式、计算机模式和环境因素有机融为一体. 结合群智能技术的最新成果, 集群武器的协同指挥控制也成为新的发展趋势.
合作行为控制
无人系统的自主行为控制能力愈发强大, 人与无人系统之间的控制关系须由简单、低效的主从式协同转变为复杂、高效的合作式协同. 无人系统的行为既需要与人的行为相互配合, 又需要保持适度的自主性, 能在人为干预与局部自主间进行权衡.
需解决的基础问题包括:
人为干预的数学建模与意图推理;
合作行为控制器的基本结构设计及其多回路控制稳定性分析.
涉及的关键技术包括:
人为干预意图的理解与建模;
合作行为控制器的设计与实现.
在“一对一”和“一对多”合作行为控制的基础上, 对人工干预的性能指标进一步提出了定量化需求, 干预的性能指标可调、可控. 干预方式从连续遥控转变为触发式干预, 何时对无人系统施加人为干预、从众多的无人平台中找出最佳干预的节点, 都是新涌现出来的问题. 将复杂网络与多智能体理论相结合, 将提供有效的解决之道.
安全指挥控制
现有的信息安全方法无法完全解决分布式控制系统安全问题, 亟需开展与其特点相适应的安全指挥控制研究工作.
需解决的基础问题包括:
攻击策略的数学描述与攻击性能的指标建模;
基于个体模型与拓扑模型的攻击检测与定位;
非合作状态估计与安全补偿控制.
涉及的关键技术包括:
攻击建模与设计;
攻击检测、辨识与定位技术;
弹性状态估计与控制技术.
需要深入研究:
如何充分利用有人/无人自主协同过程中产生的冗余交互信息, 提高对攻击行为检测的准确率;
如何在一个控制系统的框架下实现攻击和防御的协调统一.
总 结
有人/无人系统的自主协同研究可能对未来战争模式产生颠覆性变革. 通过深入研究分布式控制与优化、多智能体系统、网络化系统信息安全等技术, 有可能大幅提高有人/无人系统自主协同的指挥与控制效率, 满足未来协同作战需求, 并推动与促进计算机、人工智能、通信、微电子等多学科在基础、技术与应用多层面的交叉融合与协同创新.


有人/无人系统自主协同的关键科学问题.
陈杰, 辛斌.
中国科学: 信息科学, 2018, 48(9): 1270-1274

(扫描二维码下载完整PPT)
来源:中国科学信息科学
往期文章推荐
🔗【2018 NIMF】2018国家智能制造论坛将于中秋佳节后(9月25日至26日)在宁波举行,敬请期待!
🔗【CAA党建】重温入党志愿 传承革命精神——复杂、学会党支部双融双聚联合党日活动
🔗【通知】2018全国第二十三届 自动化应用技术学术交流会会议通知
🔗【CAC 2018】2018中国自动化大会截稿日期延至9月25日,敬请踊跃投稿!
🔗【ASSIA 7】第七期智能自动化学科前沿讲习班在北京成功召开
🔗【征文】首届ABB杯全国智能技术大赛征文中, 丰厚的奖励等你拿!
🔗【会员服务】中国自动化学会会员:现可免费申请IEEE Xplore数据库及InnovationQ Plus专利检索分析工具试用!