世界上最小、最准确和最可靠的纯惯性导航仪:ONYX™
百年来科学技术的爆炸式飞跃,海陆空天事业的迅猛发展对惯性技术提出了越来越高的要求,成为惯性技术进步的巨大推动力;而惯性技术的进步,又推动了海陆空天事业的发展,成为其不可或缺的关键技术之一。
已经广泛证明赛峰集团的半球谐振陀螺(HRG)Crystal™能够满足光学技术(环形激光陀螺(RLG)和光纤陀螺(FOG))的性能要求,具有更好的SWaP特性和更高的可靠性。基于HRG Crystal™的创新技术,赛峰电子与防务公司开发了ONYX™,OEM惯性导航系统(INS)模块可提供导航级性能,非常适合对C-SWaP要求较高的INS。ONYX™可用于太空、空中、陆地、海洋等应用,基于ONYX™模块的INS尺寸和精度为:0.001m³、1 kg和亚毫米的方位精度。凭借着ONYX™的超高SWaP性能,赛峰电子与防务公司开发了一种新的惯性导航系统,用于火炮和战车的精确导航和指向。该产品可达到出色的性能,具有市场上最短的对准时间,鲁棒性很好。新型陆地INS可以安装在任何方向上,无需外部支撑也可承受高冲击。

1
HRG:为所有应用而设计的传感器
赛峰电子与防务公司的HRG除了体积小、成本高外,还具有导航级性能和高可靠性,如图1所示。事实上,在过去十年中,赛峰电子与防务公司已经确定其HRG能够满足最高性能规格,如惯性导航应用所需,如图2所示。此前,在卡尔斯鲁厄惯性传感器与系统研讨会上已经展示了赛峰HRG在各种应用中的可实现性能,从快速寻北到无辅助惯性导航系统以及其它各种应用。第一个基于HRG的惯性测量单元(IMU)系列(PRIMUS)已于2016年推出;ONYX™ INS模块是该系列的自然演变。
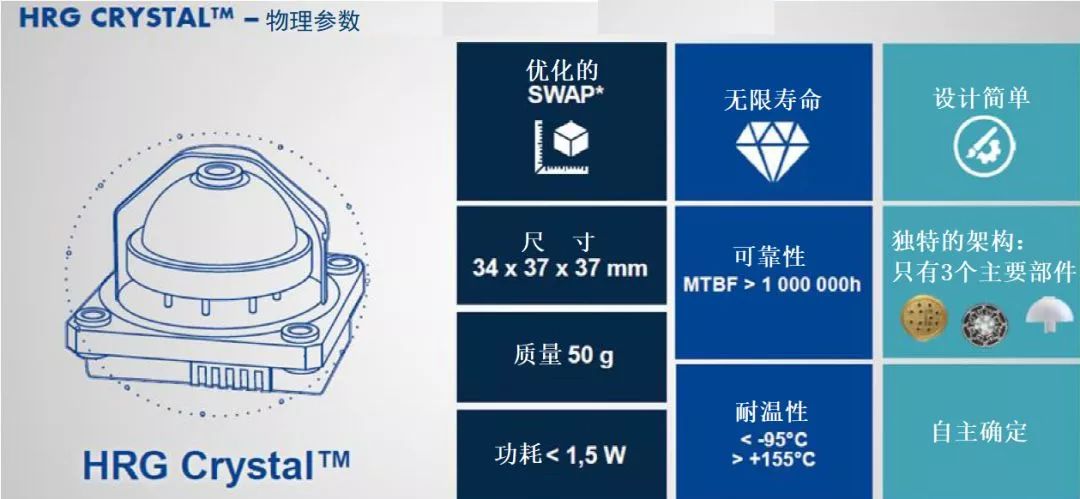
图1 HRG Crystal™——物理特性
自2005年引入AASM“Hammer”导弹(模块化空对地武器)以来,赛峰电子与防务公司一直在制造基于HRG的产品,向世界各地客户提供数千个HRG,用于陆地、海洋、太空和导弹应用。

图2 HRG应用
HRG已经被几家行业主制造商选为导航系统,是一款成熟的传感器,如图3~4所示。由图4可得出以下几点:
1) 主要受限于维护,很少用于新项目;
2) HRG和MEMS是越来越受欢迎的陀螺技术;
3) 新兴的加速度计技术是谐振元件加速度计;
4) 目前使用石英谐振微机械加速度计(VBA或RBA);
谐振硅微机械加速度计更多地集成到惯性导航级系统中。
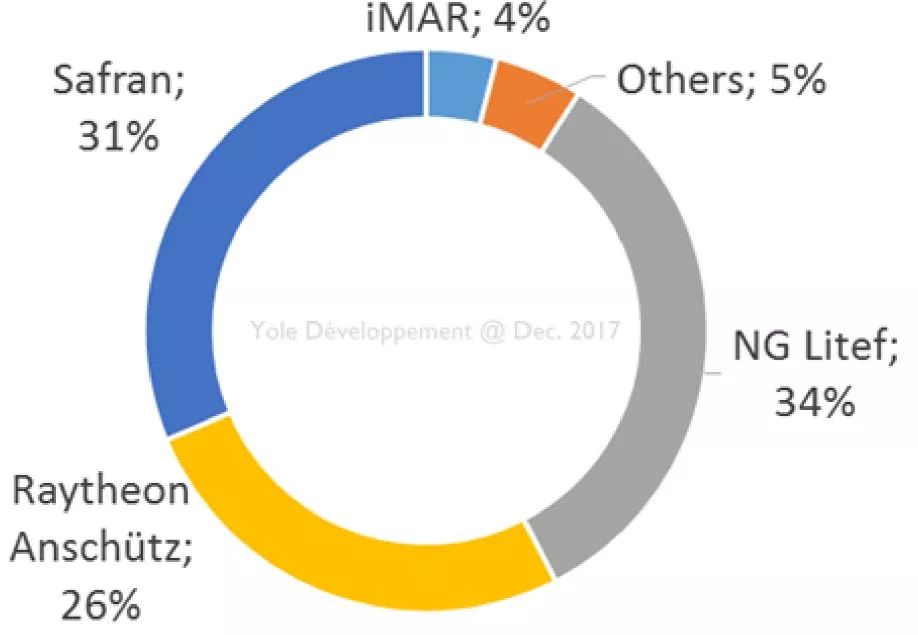
图3 HRG年度产量市场份额
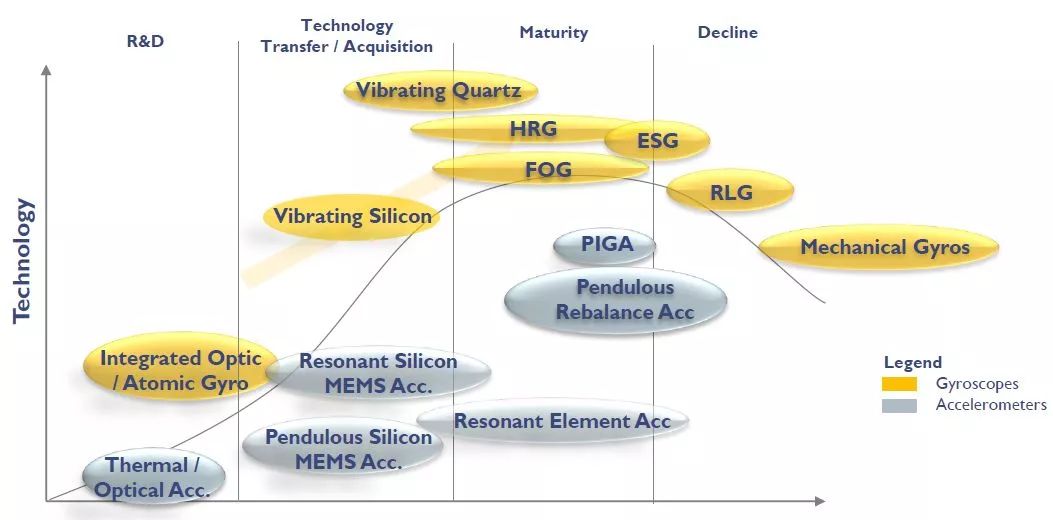
图4 不同传感器技术的生命周期
2
HRG:成本、制造和可靠性的最佳设计
对于众多产品,成本主要与人工相关,陀螺仪成本与其制造过程中所需安装操作的数量直接相关。换句话说,陀螺仪的成本与部件的数量成正比。
赛峰电子与防务公司设计了一种简化的HRG,受“设计到成本”约束的驱动:陀螺仪由3个主要部件组成,极大地提高了传感器的简易性和制造便利性。如图5所示,赛峰HRG主要组成部分如下:
1)高Q值振动半球谐振器;
2)电极和电极支撑,用于启动和保持谐振器的振动,并感知波的特性;
3)支撑部件。

图5 HRG突破(从左到右:支持、电极支架和谐振器)
这种非常简单的设计不仅能使成本降低,还能提高可靠性:传感器的平均故障间隔时间(MTBF)为1 000 000小时,不仅降低了购置成本,而且降低了维护价格。
3
HRG:具有最佳SWaP的高端性能
与FOG不同,为提高精度通常需要增加光纤的长度,这导致IMU的尺寸、质量和成本的增加,赛峰HRG的良好可扩展特性和微调使其能以同样的尺寸满足不同系统类型和性能范围的要求。
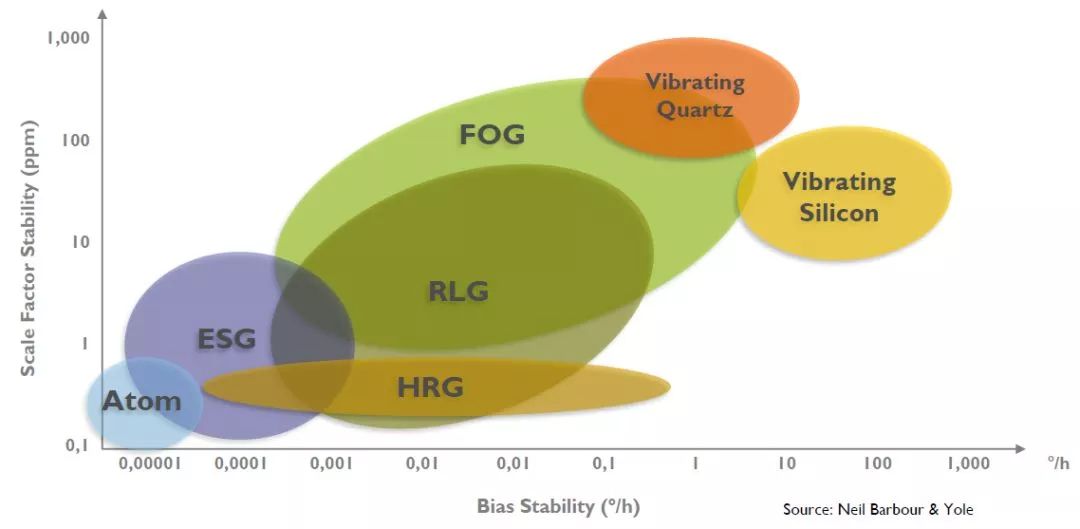
图6 HRG与其它传感器的零偏稳定性范围
在DARPA公布的比较研究中,赛峰HRG被评为导航级领域中具有最佳成本、尺寸、重量和功率(C-SWaP)的传感器,可与霍尼韦尔公司的HG9900或诺格公司的HRG竞争。如图7所示,其它陀螺仪技术始终遵循性能与C-SWaP相关的趋势,而HRG正在改善这一趋势。
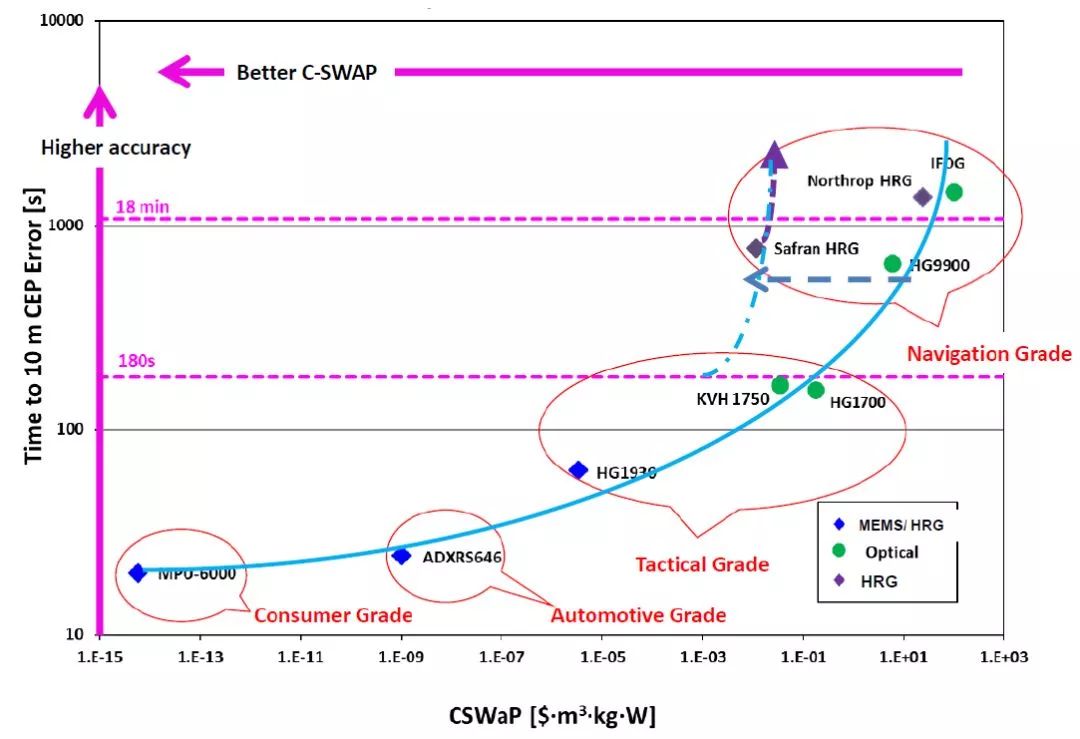
图7 不同传感器C-SWaP随导航性能的变化
赛峰电子与防务公司充分利用其在HRG制造方面的技术优势,提供了一款具有最佳C-SWaP性能的INS模块ONYX™。
ONYX™是一种新型INS模块,其设计依赖于赛峰电子与防务公司的最新一代惯性传感器技术,除了3个A600摆式加速度计,还有3个HRG。在对尺寸和成本要求高的市场中,赛峰电子与防务公司充分利用其传感器,设计能够满足各种应用的INS模块,具有相同的尺寸、质量和功耗。
ONYX™ INS模块是多年开发的成果,其主要目标是获得高精度导航模块,能够应对严苛的机械/热环境,并具有最佳的C-SWaP性能。
1
C-SWaP和可靠性
ONYX™设计的主要驱动力是减小尺寸和质量,以便能够在各种导航系统中使用。ONYX™由3个新一代HRG、3个A600摆式加速度计和4个专为陆地导航环境设计的阻尼器组成。为充分利用惯性传感器组件,电子板还提供了电源、滤波器、最先进的I/O(RS、以太网、CANBUS、离散......)以及导航计算等常用和必要的功能,该自主模块的主要特征如表1所示。
除了体积小、质量轻外,ONYX™的主要特点之一还包括功耗。 事实上,该设计已经过优化,以尽可能降低功耗。通过对电子板进行特殊设计,使ONYX™在所有条件下的功耗都低于12 W。相同性能的传感器体积减小到原来的1/5。
表1 ONYX™机械设计的关键数字

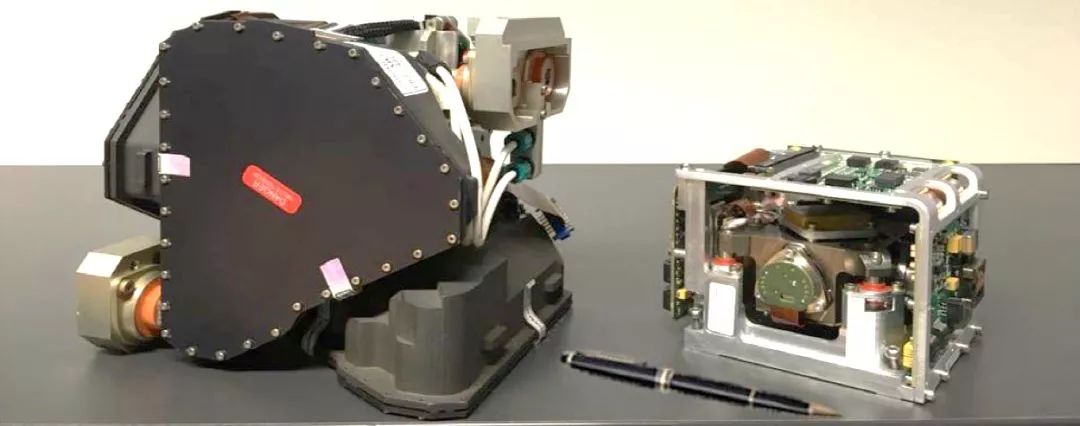
图8 集成了32cm RLG UMI和ONYX™的INS组件
可靠性同样也受益于传感器的换代升级,基于年平均任务情况,ONYX™的MTBF大于250 000 h。
2
机械环境稳健性
ONYX™ INS模块开发的主要初始要求之一是能够针对许多潜在市场,从船舶导航到火炮指向,不仅提升传感器性能,而且提高其在典型机械环境中的性能。
HRG的简单而坚固的设计使其非常难以应对所有应用的机械环境:在传感器性能水平(无任何阻尼系统)降低到600g/2ms的半正弦冲击中,已经证明了其内部鲁棒性。
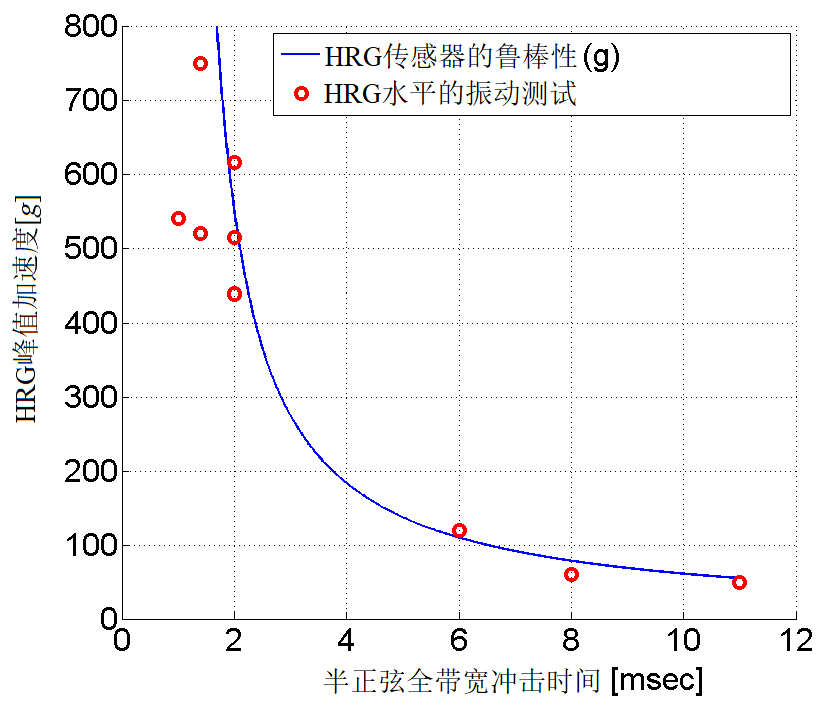
图9 HRG Crystal™半正弦冲击稳健性
ONYX™模块也可以在需要时加固,如需要承受数百次高振幅冲击的严苛炮兵环境。用于陆地应用的新INS产品GEONYXTM表明:ONYX™ INS模块可集成在机械外壳中,并针对最恶劣的陆地条件进行了优化,无需外部阻尼系统,这使ONYX™ INS模块体积仅为5 L。

图10 GEONYX™陆地导航系统
ONYX™为GEONYX™新陆地导航系统带来了与Sigma30N相同的性能和机械强度,但尺寸、功耗和成本都相当低。
表2 炮兵级陆地系统的关键特征
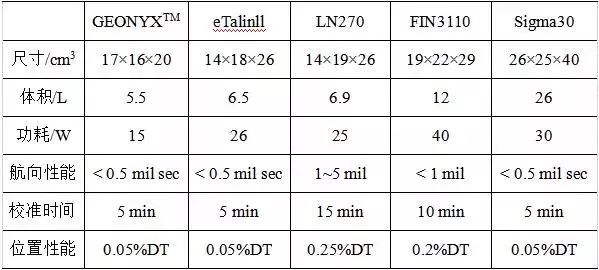

图11 高性能火炮INS的功率与尺寸比较
GEONYX™已设计并经过火炮系统的环境(频繁的冲击和振动)测试。该认证包括符合MIL-STD-810G、方法516-4、程序1和5的ONYX™模块,通过引入最先进的高性能导航级INS模块,完善了赛峰电子与防务公司惯性系统的产品组合。
3
最先进的接口
ONYX™功能接口简单,但为系统集成提供了所有有用的信息。ONYX™的电气接口基于用于内部全球导航卫星系统(GNSS)的RF天线连接器和单个60针连接器,嵌入了单个28 V电源(不需要任何其它电压)和所有典型的I/O接口(RS422、以太网、CANBUS、里程表、离散......)。
4
性能
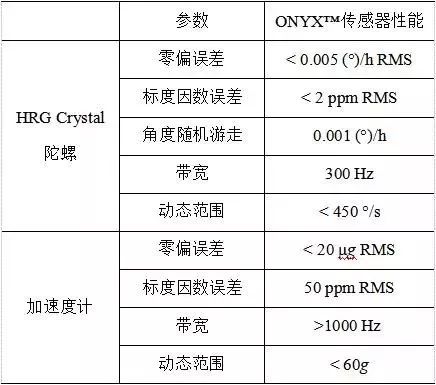
C-SWaP对于集成INS模块的竞争力至关重要,但它通常会影响整体性能。ONYX™的设计目标是达到最佳性能标准,无需在寻北和导航阶段进行权衡。ONYX™传感器的主要特征如表3所示。
表3 ONYX™传感器性能
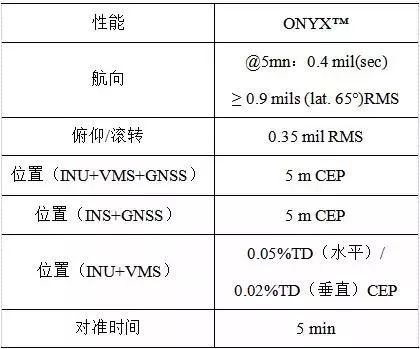
ONYX™可以集成到各种导航系统中,GEONYX™陆地导航仪性能参数如表4所示。
表4 ONYX™/GEONYX™陆地导航INS性能
迄今为止,已经为不同类型应用制造了数十个ONYX™ INS模块,这为衡量产品的整体性能提供了机会。
1
传感器评估
传感器是INS模块导航性能的关键,对一批次约1000个HRG的零偏误差和标度因数进行了统计分析。
绝对陀螺仪零偏误差是陀螺罗经方位角误差的关键。图12介绍了热校准后HRG零偏残余误差的总体密度(在-23 ℃~+80 ℃温度范围的RMS)。结果表明,100%的Crystal™ HRG符合零偏误差要求,且具有合适的余量。
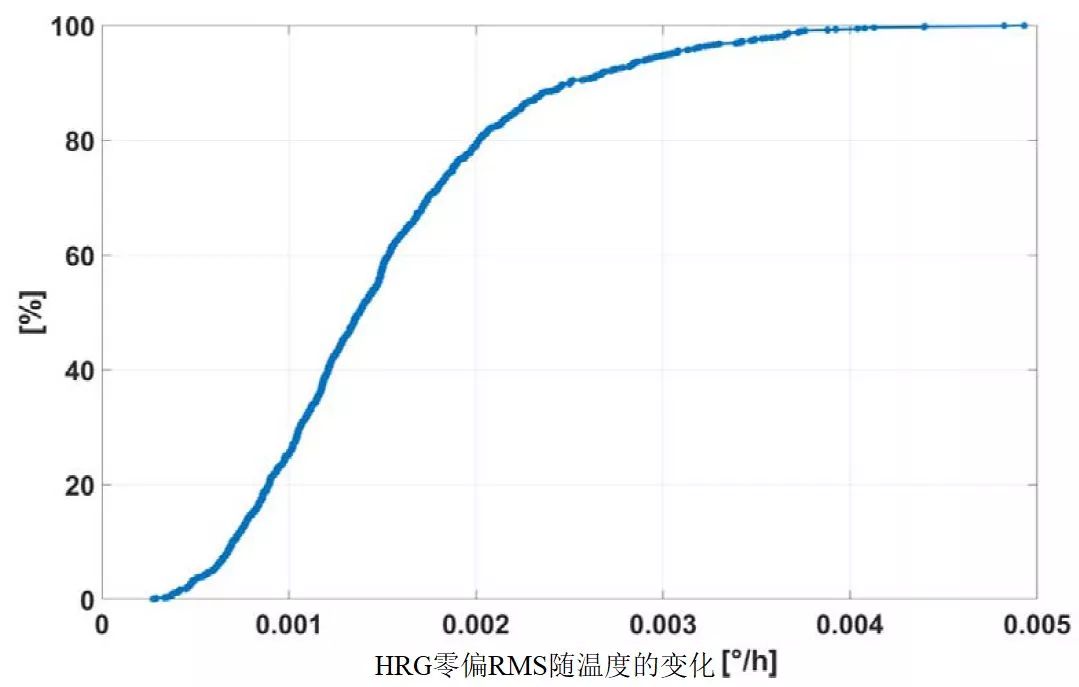
图12 总体数量密度的HRG Crystal™零偏残余误差
图13为热校准后的HRG标度因数残差总体密度(在-35 ℃~+80 ℃温度范围的RMS)。结果表明,在-35 ℃~+80 ℃温度范围内,100%的CrystalTM HRG标度因数在0.2~1.6 ppm(RMS)之间,完全符合表4中陀螺仪标度因数的要求。
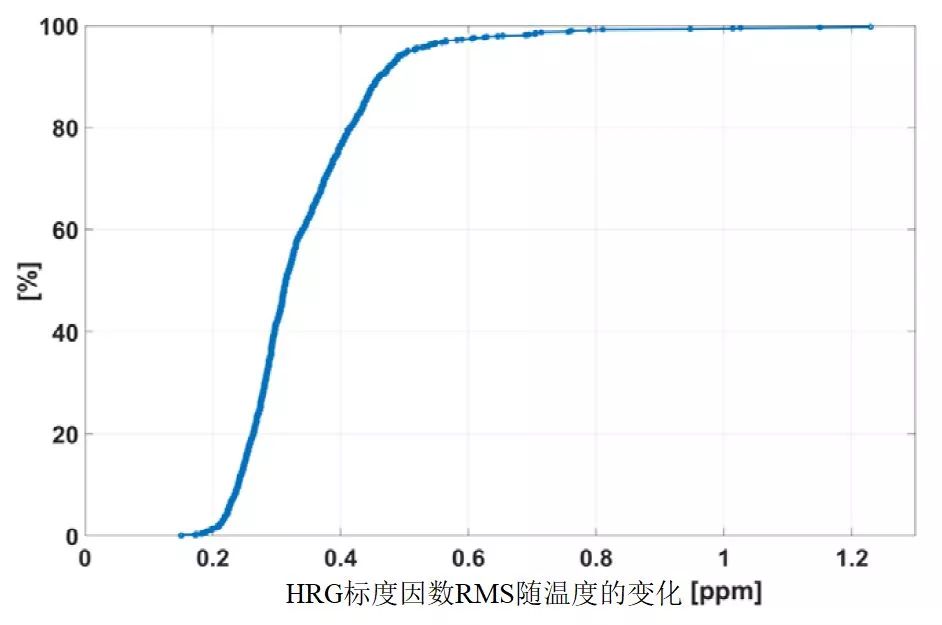
图13 总体数量密度的HRG Crystal™标度因数残差
图14是在7个ONYX™模块中校准的21 A600加速度计的零偏残余。RMS值符合要求,具有重要余量。
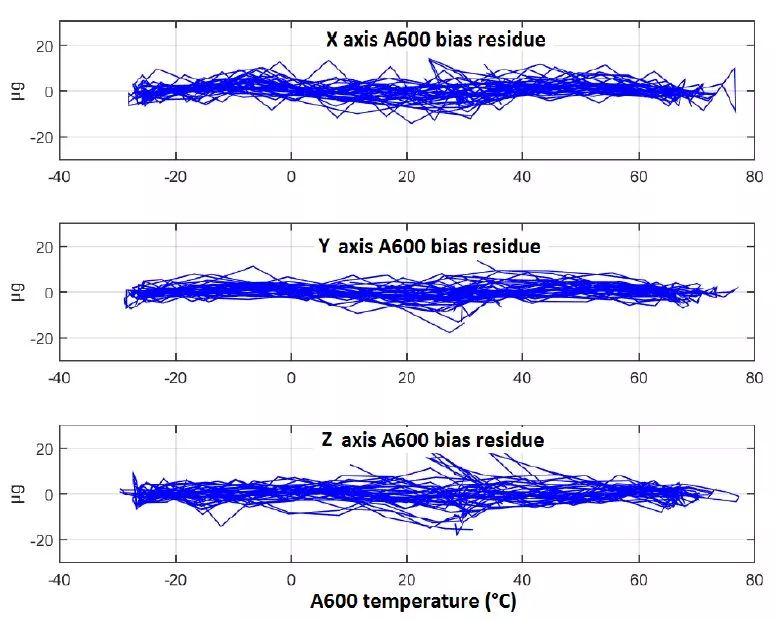
图14 ONYX™ A600加速度计热偏压残余随温度的变化
2
ONYX™陀螺罗经性能
ONYX™在5 min对准期间获得的方位角精度约为0.5 mil(sec),并且随时间的推移而改善,在10 min后达到约0.2 mil(sec)的方位角误差。图15是300个校准测量后的统计时间误差。
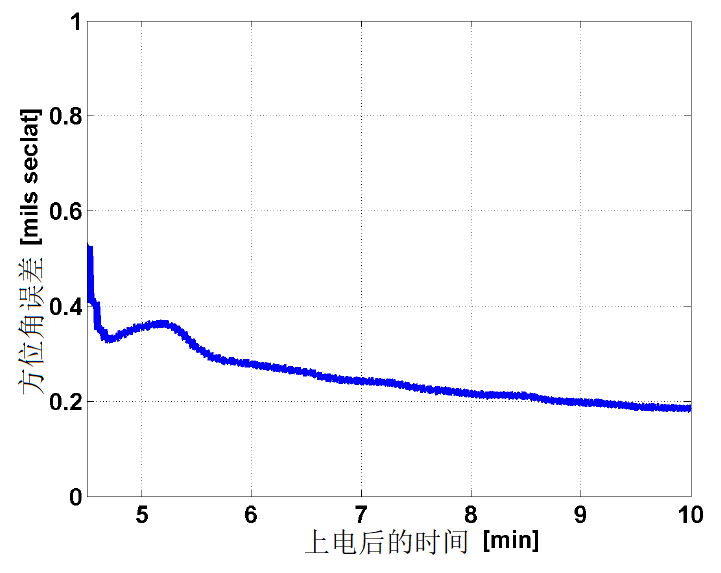
图15 ONYX™ INS模块陀螺罗经性能
3
陆地导航性能图
赛峰集团已展示出的ONYX™导航精度如下:
1)无GPS的水平位置误差<0.05%DT;
2)航向误差<0.5 mil sec RMS。
图16所示为GEONYX™(INS系统中集成ONYX™模块)在GPS拒止期间进行的勘测。如图17所示,GPS不可用时,GEONYX™的水平位置误差优于0.05%DT,垂直位置误差优于0.02%DT。
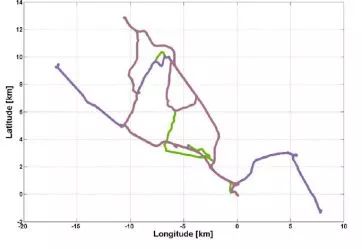
图16 勘测期间的GEONYX™ INS轨迹
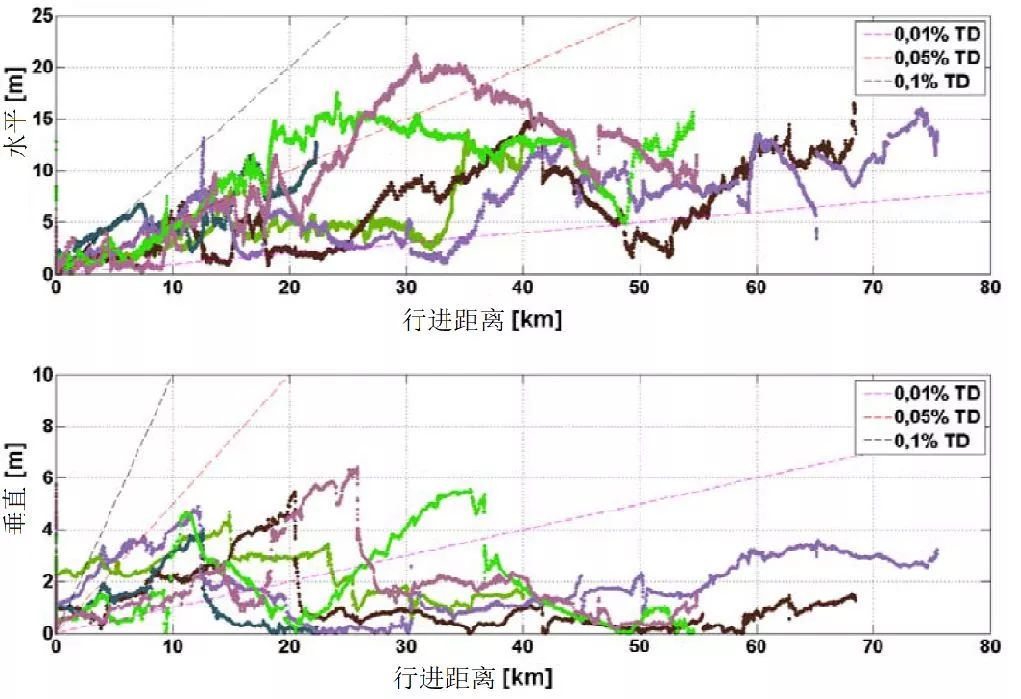
图17 GEONYX™ INS在勘测期间的位置
此外,在GPS不可用的动态陆地导航期间,寻北期间可以获得准确度,参考Sigma30N INS。
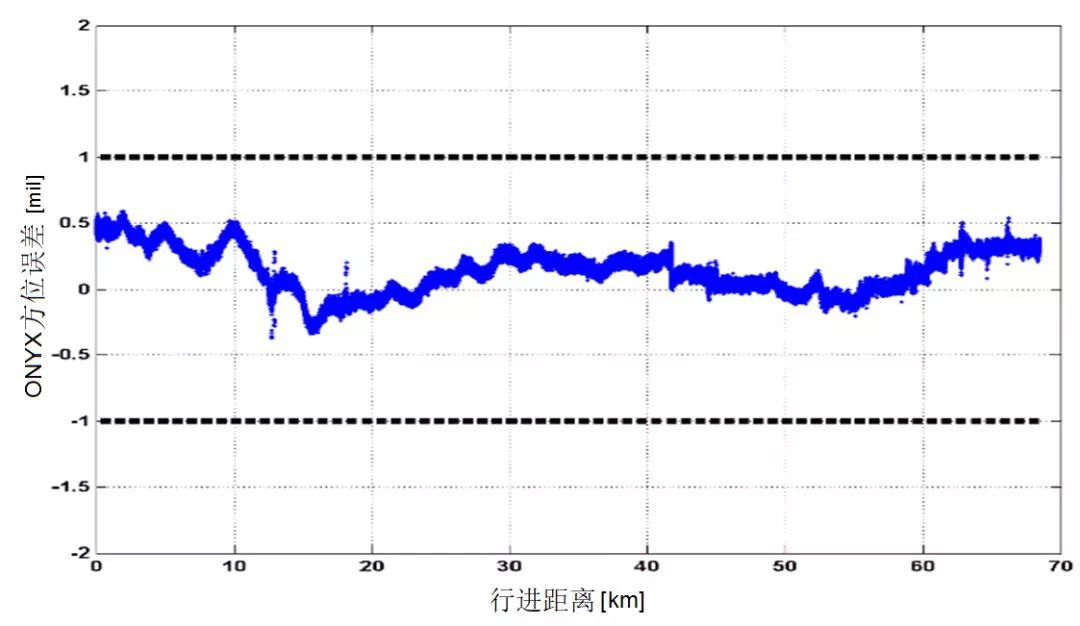
图18 在70km GPS拒止陆地导航时GEONYX™ INS的方位角性能
由于SWaP导向设计,ONYX™ INS模块具有环境鲁棒性和高导航级传感器性能,以适用广泛的应用。它既可直接用于紧密集成的复杂系统,也可集成在增强型火炮和陆地导航系统中,或者空间应用以及士兵便携式系统。
3
法国陆军的Griffon(VOA)集成
法国陆军选择ONYX™作为其新型Griffon装甲车的全景先进稳定电子光学-数字火炮前方观测(PASEO-DAFO)设备。由于其高性能和高紧凑性,ONYX™(以及用于测距和目标指向的光电相机和激光模块)可直接集成到PASEO-DAFO传感器盒中。这种光电瞄准器的集成架构可实现准确的目标地理定位,而这是任务的关键。
此外,受益于其导航级高性能,ONYX™可消除车辆中额外导航系统的需求:集成在光电瞄准器中的ONYX™模块直接用于车辆运动时的导航(观察桅杆与光电瞄准器折叠在车辆中)。通过降低架构复杂性(仅一个导航系统)、质量、功率和成本来改进新车辆。
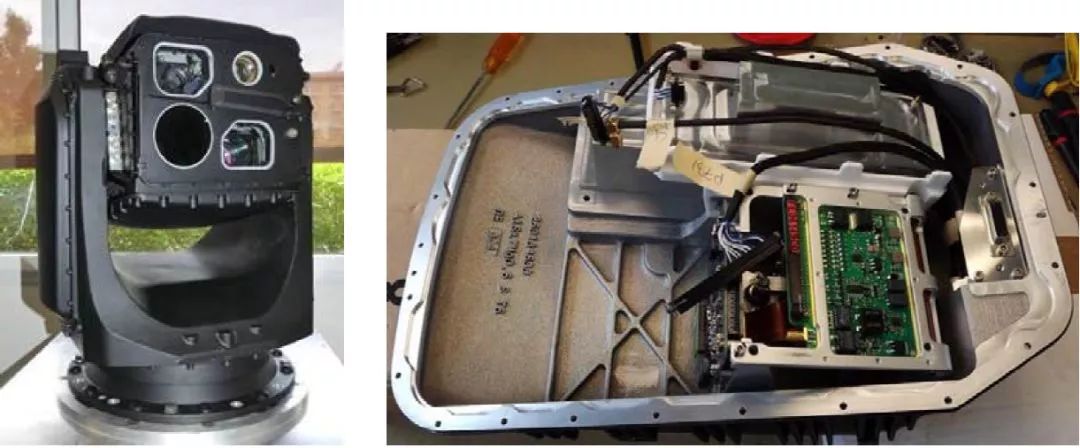
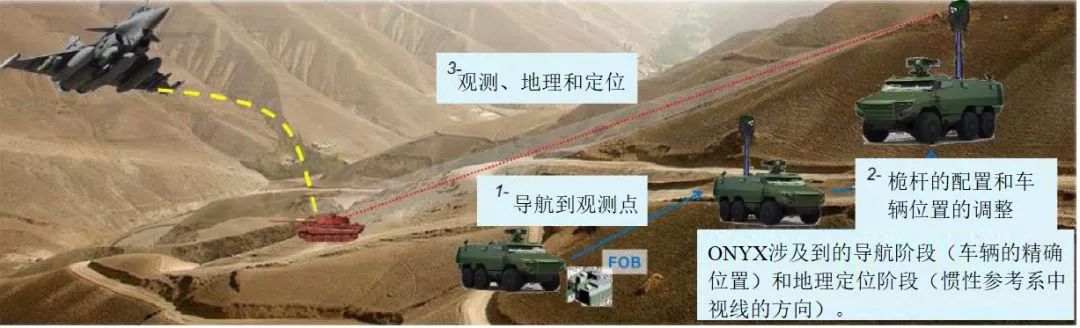
图19 ONYX™集成在法国Griffon(VOA)装甲车中
2
GEONYX™陆地系统
ONYX™模块已集成到赛峰集团开发的GEONYX™新陆地导航系统中,2018年已在欧洲推出,被法国制造商NEXTER引用,首批设备2018年底交付给客户。

图20 2018年欧洲展上的ONYXT™和GEONX™
3
阿里安6
结合ONYX™的SWaP和HRG Crystal™在恶劣空间环境中的鲁棒性(赛峰电子与防务公司的100 HRG目前用于欧洲航天局(ESA)和泰雷兹阿莱尼亚处于地球静止轨道的太空卫星上)。赛峰电子与防务公司已于2016年10月开始阿里安 6 IMU的开发。目前,阿里安 6的SpaceNaute惯导系统正在交付,满足IMU的7 L、7 kg和14.5 W功耗的需求。预计将于2020年7月首次发射。
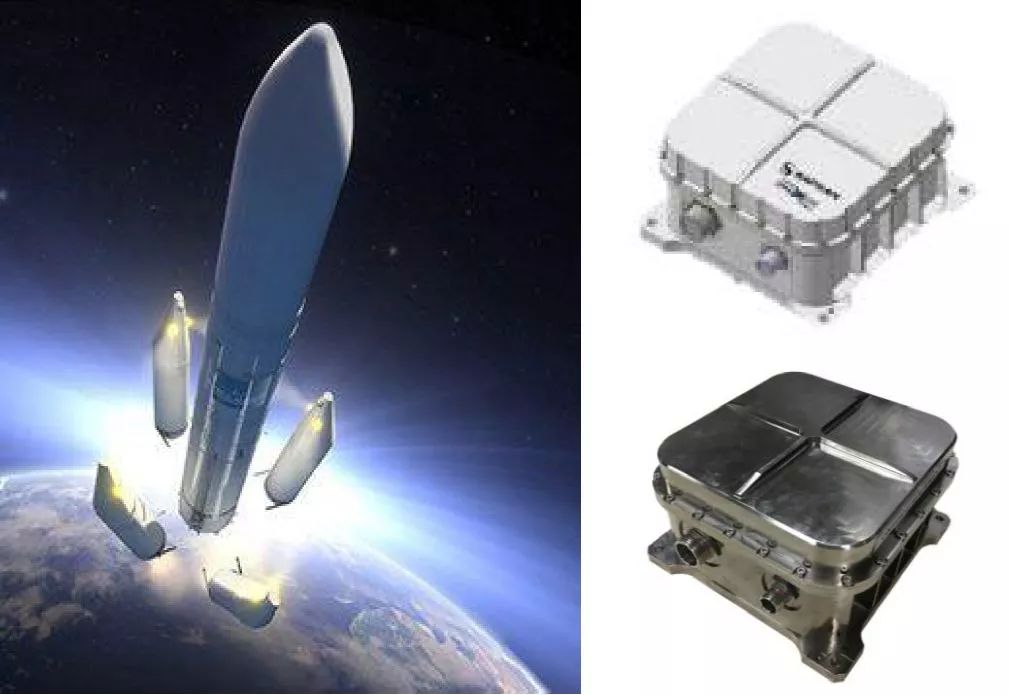
图21 阿里安6的IMU
4
针对士兵的指向应用和便携式系统
基于HRG Crystal™,赛峰电子与防务公司开发了精确方位垂直角度模块PAVAM,这是一款创新的真北寻北仪,在精度、可靠性和SWaP方面性能优越。PAVAM可用作子系统集成到手持式瞄准系统中,有助于在极端气候条件和GPS拒止环境中为士兵提供精确定位能力。
凭借其强大的算法和高性能HRG Crystal™,PAVAM可通过检测地球自转确定系统的方位角,达到快速寻北的目的(2 mil只需要不到180 s)。这使得士兵能够以比以往更高的可靠性、更快的速和更轻的设备执行精确定位任务。第200台PAVAM装置已经交付给莱昂纳多DRS,用于美国陆军的联合效应目标系统(JETS)。
本文选自《国外惯性技术信息》2019年第1期
转自丨海鹰资讯
往期热文(点击文章标题即可直接阅读):







