马斯克又吹牛!一年超越波士顿动力,先赢了中国小姜再说
![]()
来源:新智元
本文约2900字,建议阅读6分钟
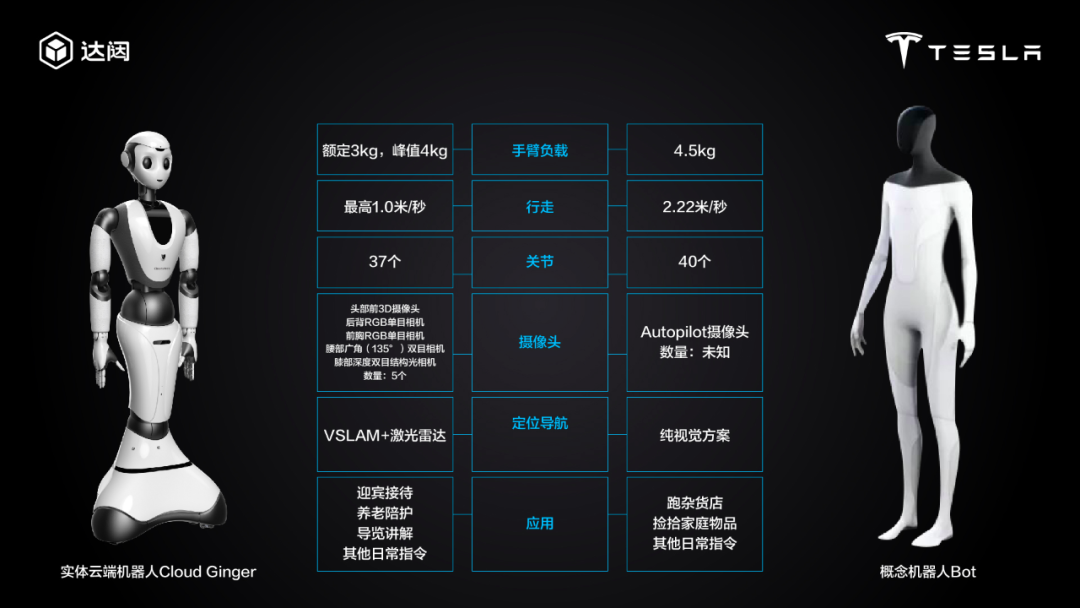
本文介绍了特斯拉概念上人形机器人 Tesla Bot。



















登录查看更多
相关内容

Arxiv
1+阅读 · 2022年4月19日
Arxiv
0+阅读 · 2022年4月16日



相关VIP内容
相关资讯