【团队新作】水中独舞: 机器海豚以假乱真

今日聚焦
机器海豚设计中一个重要的控制问题就是路径跟踪,其挑战在于复杂的动力学环境。来自中科院自动化所复杂系统管理与控制国家重点实验室的谭民研究员带领的团队针对这一问题研究了基于滑模模糊控制的路径跟踪控制方法,实现了机器海豚路径跟踪控制。
海豚是最神秘的水生生物之一,拥有卓越的游动速度,叹为观止的机动性和高效的推进效率。这些令人惊讶的运动技能激励着研究者和工程师们去创造新型设计来代替传统螺旋桨推进驱动系统来进行水下探索、水质监测、水下地形构建等。
在这些应用中,一个重要的控制问题就是路径跟踪。意思是,船只在海流的影响下,接近并跟踪一个与时间无关的预定路径。设计机器海豚鲁棒跟踪控制方法的挑战在于复杂的动力学环境,包括高度的非线性,不精准的动力学参数,还有外界环境的干扰。将机器海豚动力学转换成标准的数学模型也是不可能的。
机器海豚如何克服上述困难是实现机器海豚路径跟踪控制的关键。
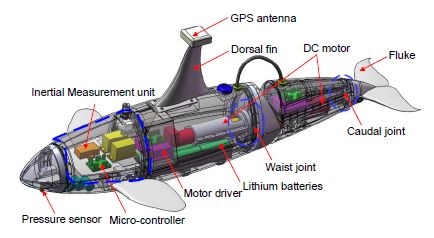
来自中国科学院自动化研究所复杂系统管理与控制国家重点实验室的谭民教授带领的团队针对这一问题研究了基于滑模模糊控制的机器海豚路径跟踪控制方法。Science China Information Sciences 2018年第2期MOOP栏目报道了这一研究成果,相关文题为 “Sliding mode fuzzy control-based path-following control for a dolphin robot”。
Demo
作者喻俊志说:“在所有能够跃水的水生动物中,海豚采用背腹式推进,即在竖直面内上下拍动尾鳍,能够得到更佳的俯仰机动能力,更适于在水面附近做上下翻飞的动作,具有比其他鱼类更小的跃水门限速度”。团队在相关的应用领域也进行了前瞻布局。谭民教授欣喜地透露,通过实地完成机器海豚布放、性能测试和回收试验,最终验证了研究结果,预示着距离应用又近了一步。(本段文字内容原载于《中国科学报》 2018-01-22 第6版 院所)

Sliding mode fuzzy control-based path-following control for a dolphin robot.
Liu J C, Wu Z X, Yu J Z, et al.
Sci China Inf Sci, 2018, 61(2): 024201

更多精彩内容,欢迎关注
中科院自动化所官方网站:
http://www.ia.ac.cn
欢迎后台留言、推荐您感兴趣的话题、内容或资讯,小编恭候您的意见和建议!如需转载或投稿,请后台私信。
来源:中国科学信息科学


中科院自动化研究所
微信:casia1956
欢迎搭乘自动化所AI旗舰号!





