近日,美国工程管理学会(American Society for Engineering Management, a.k.a. ASEM)2020 国际年度会议(International Annual Conference 2020)公布了最佳论文奖项。
在论文《A Two-Layer Routing Algorithm for Unmanned Aerial Vehicle in Transmission Line Inspection》中,密苏里科技大学 (Missouri Unversity of Science & Technology), 纽约州立大学石溪分校(Stony Brook University)) 和明略科学院合作提出的新型电力输电线巡检路径决定方法获得了该奖项。
本文介绍了此论文核心内容。
![]()
电力输电线系统需要定期巡检,以发现可能存在的设备磨损并实施维护保养。最传统的巡检方法是人工巡检,即工人在输电线上「匍匐」移动,但这个方法费时费力,还很危险。后来,直升飞机被用于巡检,检查人员固定在直升机机舱外,对输电线进行检查。危险性虽然有所降低,但是依然存在,并且巡检成本高昂。近期,巡检机器人的方式得到了提倡,它能够显著提高作业效率、降低劳动成本和维护人员的风险。
在电力输电线系统巡检中用到的机器人一般分为两类:悬挂式机器人(Suspended Robot)和无人机(Unmanned Aerial Vehicle)。无人机巡检因其高效和在不同领域中的成功应用引起了广泛关注。
在使用无人机进行电力输电线系统巡检时,需要部署地面控制站,以保障和无人机之间的双向信号传输(一方面,无人机将巡检过程中所得的视频信号传到地面控制站,另一方面,地面控制人员将无人机移动信号传输给无人机)。一般来说,信号传输距离存在距离上限,同时,无人机的动力系统也有飞行时间上限,所以地面控制站需要调整位置,以保障信号传输并对无人机的动力系统进行更新。
一般来说,地面控制站的部署 / 移动和无人机的移动不是同步的。无人机在飞行工作时,地面控制站保持静止。地面控制站在变化位置时,无人机不处在飞行工作状态。
针对这个问题,密苏里科技大学和明略科学院合作提出了一种新型
双层路径方法,以缩减巡检时间,提高巡检效率
。该方法在密苏里州山区的一段输电线上得到应用,巡检时间和巡检成本都出现了大幅度下降。
输电线系统巡检线路一般是在两个 substation 之间,所以该研究所拟的
路径决定算法基于两个 substation 之间的输电线巡检
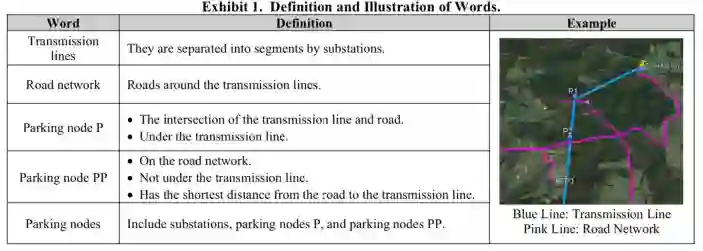
。考虑到输电线下方附近的地面道路网络,该方法需要考虑两类停车点:第一类停车点(P)恰在输电线下方,第二类停车点(PP)不在输电线下方,离输电线下方点 P 距离最近。具体定义参见下图,图右展示了输电线和地面道路网络示例:
![]()
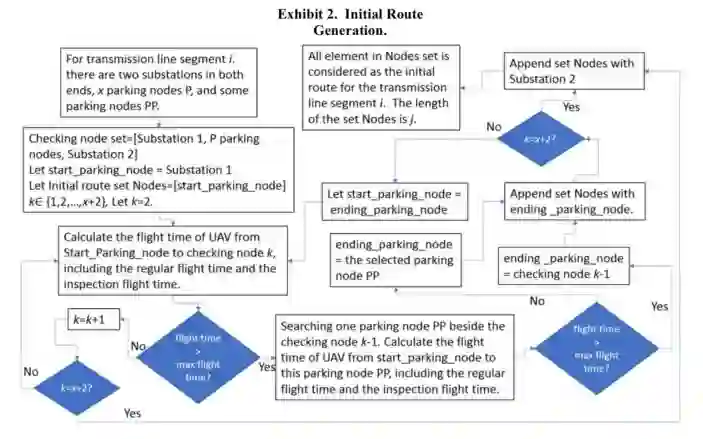
具体而言,该方法首先确定初始路线。根据无人机动力所支持的最大飞行时间,将两个 substation 之间的行驶路线划分成若干段,这里主要考虑的是无人机动力系统所支持的最大工作时间。
该过程如下图所示,对于每一段输电线,起始停车点和巡检节点是 substation。将停车点 P 添加到巡检路径中直到操作时间超过无人机动力系统所支持的最大飞行时间。将距离 P 最近的停车点 PP 添加到巡检路径中,再次计算操作时间。如果操作时间小于最大飞行时间,则将停车点 PP 看作最后站点,反之则将最后添加的停车点 P 作为最后站点。接下来,将起始停车点修改为最后站点,并生成下一个巡检路段,直到所有停车点得到确认,整条输电线被囊括在此次巡检内。
![]()
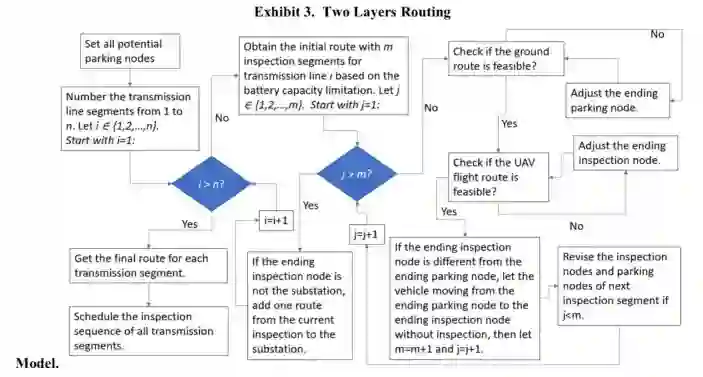
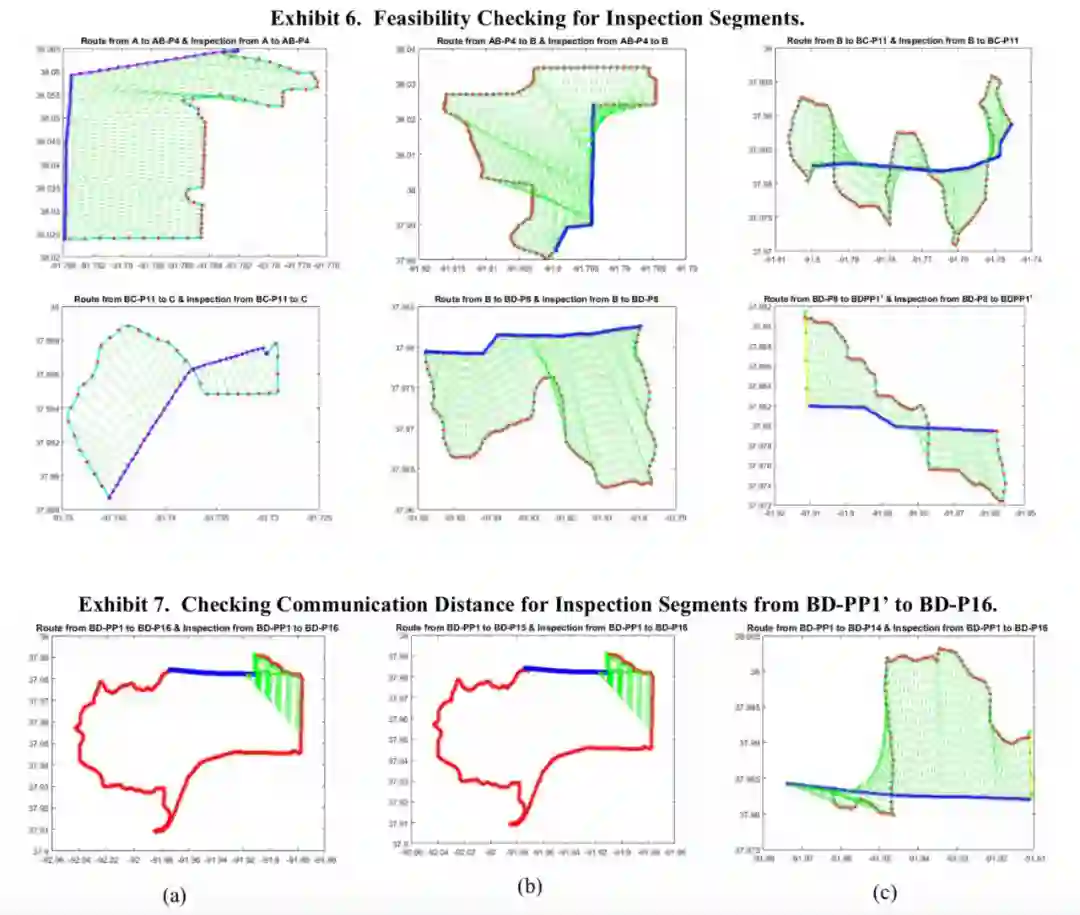
第二步进行修正。修正时需要考虑信号传输的可行性和地面控制团队的移动速度(假设,要求地面控制团队和无人机同时抵达最后一个站点)。如此迭代,直到无人机电力系统和信号传输约束全部满足为止。
这一步需要调整地面路线和无人机飞行路线。完成二者的可行性检查后,还需复查更新后巡检分段的最后站点,确保最后站点是 substation。最后还需要优化不同输电线的巡检顺序。
![]()
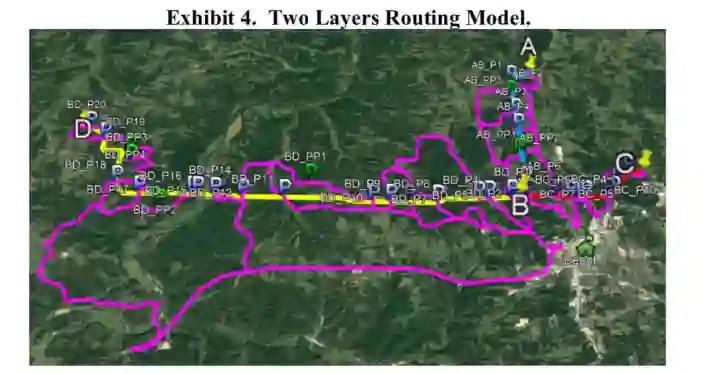
该研究团队使用这一新型双层路径决定模型,规划了无人机巡检飞行线路。涉及的电力输电线共分为三段,分段情况和 substation 参见下图:
![]()
A、B、C、D 表示 substation;三段输电线被这些 substation 分割开,被命名为 AB(蓝色)、BD(黄色)和 BC(红色);粉色线表示道路网络;P 和 PP 表示两类停车点。
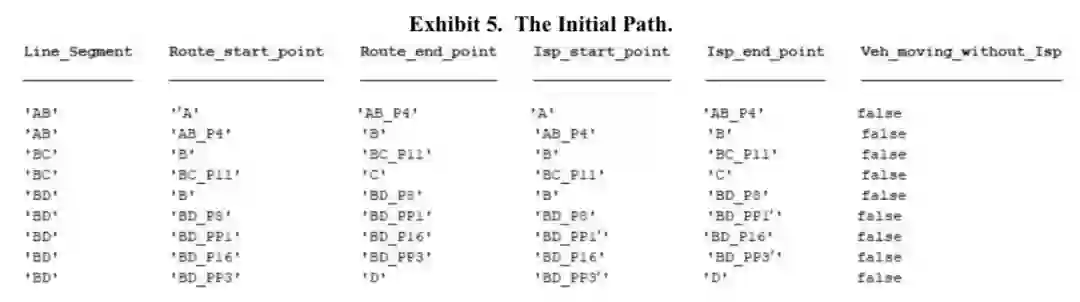
根据该方法的第一步,在该案例中得到的初始路径如下所示:
![]()
![]()
![]()
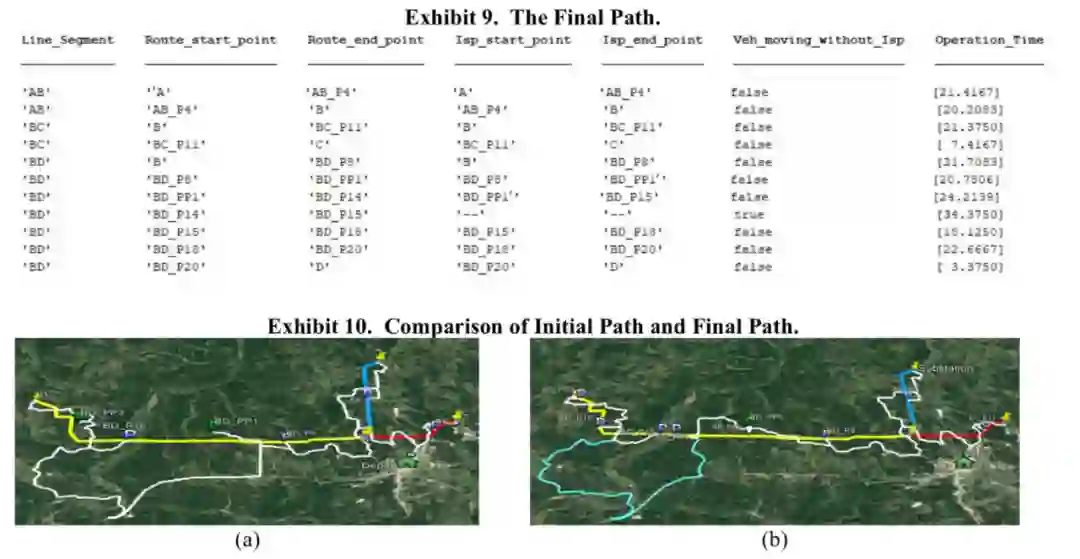
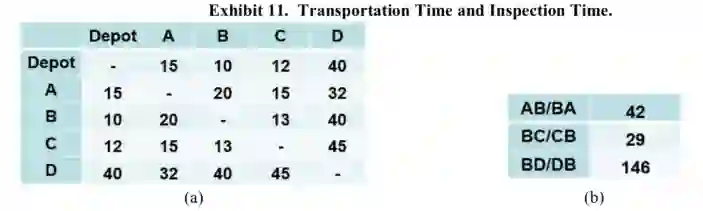
得到每段输电线的巡检路径后,就到了最后一步:在最优时间内规划所有输电线分段的巡检顺序,这时只需考虑交通时间和巡检时间。下图列举了交通时间和巡检时间,出于方便考虑,此处忽略电池放置时间、初始设置时间和巡检结束后的收尾时间,因为这些不会影响顺序结果。
![]()
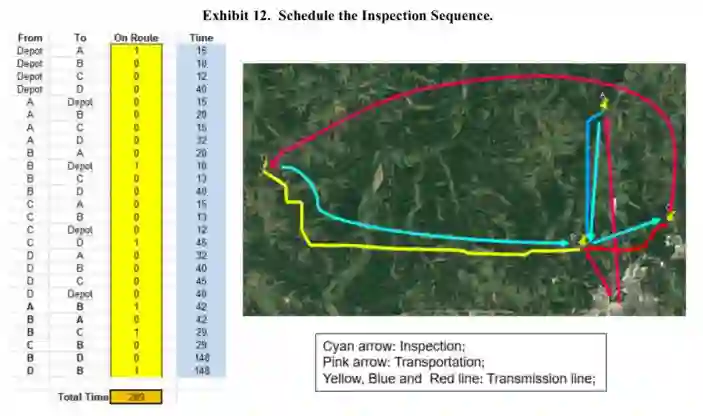
最终得到的优化巡检顺序参见下图,共耗时 289 分钟,巡检顺序是「 Depot→(transportation) →A→(inspection) →B→(inspection) →C→(transportation) →D→(inspection) →B→ (transportation) → Depot」:
![]()
这项研究与密苏里 Ameren 电力公司合作完成。实现无人机和地面控制站的同步移动,并缩减电力输电线系统巡检时间、提高巡检效率,该研究提出的双层巡检路径决定方法在该领域具备强大的应用潜力。
本文为机器之心报道,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者 / 实习生):hr@jiqizhixin.com
投稿或寻求报道:content@jiqizhixin.com
广告 & 商务合作:bd@jiqizhixin.com