CVPR 2019 | 端到端的投影光度补偿
点击上方“计算机视觉life”,选择“星标”
快速获得第一手干货
将于 6 月在美国长滩召开的CVPR 2019临近,新的计算机视觉和模式识别算法成果不断被披露,近日,AR产品与服务提供商亮风台公布了投影AR算法研究最新成果,主要用于解决投影仪光学补偿问题,即当投影屏幕不是理想的白色漫反射时,尽可能消除投影面上的图案。相关论文《End-to-end Projector Photometric Compensation》已经入选CVPR 2019的oral presentation环节。数据显示,今年有超过 5165 篇的大会论文投稿,最终录取1299 篇,而oral presentation的入选率只有提交论文的5%左右。
与之前提出的传统的方法相比,新成果在数值和质量效果上大幅提升,可以预见,该成果将成为投影AR技术应用落地提供重要的技术基础。事实上,这不是亮风台第一次在投影AR算法上取得重要研发突破,去年,亮风台和美国两所科研单位联合研发出一套新的投影仪-相机联合标定方法,对于一个相机姿态仅仅需要一次投影采样,使标定效率和实用性大大优于之前的大部分标定系统,其成果发布于国际顶级增强现实会议ISMAR。ISMAR的参与对象主要为学术界,来自于工业界的工作凤毛麟角。
《End-to-end Projector Photometric Compensation》的重要贡献主要在以下几点:
1. 首次将投影仪光学补偿问题阐述为一个端到端的深度学习问题,然后构造一个新颖的名为CompenNet的卷积神经网络(CNN)来隐式的学习这个复杂的补偿函数。
2. 首次提出一个独立于设备和实际投影的数据库和评价基准,今后类似的工作可以在这个评价基准上统一比较,而不需要复现该研究中使用的设备和实际投影,以前的工作是没有这样的评价基准的。
3. 提供了一个预训练的方法,将预训练好的CompenNet迁移到新的投影屏幕和硬件设置上,只需要拍摄少量的采样图片就可以媲美甚至超过从零开始训练CompenNet和传统方法,这样可以大量的节省采样图拍摄时间和训练时间。
4. 在亮风台提出的评价基准上比较了CompenNet和其他传统的方法,以及一个通用的图到图迁移的深度学习框架pix2pix,实验结果显示在数值和质量效果上新方法都大幅度优于其他参与比较的方法。
背景介绍
这篇工作主要解决投影仪光学补偿问题,即当投影仪屏幕不是理想的白色漫反射时,屏幕的颜色和纹理会导致用户看到失真的效果,如下图1所示。
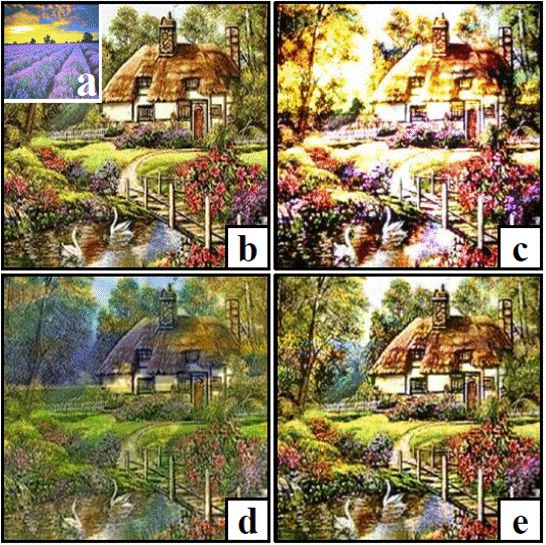
图1. (a) 正常光照下的具有纹理和颜色的投影屏幕。(b) 投影仪投射的图片(也是我们想要看到的效果)。(c) 相机拍摄到的,没有补偿的投影结果,即将(b)直接投影到(a)上。(d) 我们模型计算出的补偿图。(e) 相机拍到的补偿后的效果,即将(d)投影到(a)上。比较(c)和(e),可以看到明显提升的效果和细节。
为了解决投影仪光学补偿问题,一般是用一个相机来拍摄大量的投影仪投射的图片,然后从这些拍到的和投射的图片对中拟合出一个光学补偿函数,再将要投射的图片经过这个光学补偿函数补偿,最后由投影仪投射,这样投射的补偿正好可以抵消非理想屏幕的颜色和纹理和投影仪本身的非线性光学特性。
但是以上的光学过程过于复杂,所以很多传统方法以及目前效果较好的算法,都是将这个过程简化为投影仪像素与相机拍到的像素只是一一对应,然后独立地对每个像素拟合一个光学补偿函数。这样的假设,往往忽略了很多重要信息,比如由于投影仪和相机跟屏幕的距离,投影仪相机轻微失焦和屏幕表面相互反射等因素,每一个投影仪的像素并不是跟每个相机像素一一对应,很可能一个投影仪像素覆盖了几个相机的像素,这样的简化势必影响投影仪光学补偿的效果,实验的结果也印证了这一点。
研究方法
为了避免过于简化,我们采用一个新思路,即用CNN网络来端到端隐式地学习这个复杂的光学补偿函数。这样的好处主要是:
1. CNN有足够的模型复杂度来拟合复杂的光学过程。
2. CNN卷积核本身就对领域像素采样,这样我们不需要像传统方法那样进行像素一一对应的简化。
3. 根据我们的数学推导,发现可以用一张相机拍到的屏幕照片


图2. CompenNet的结构。比较训练(左)和补偿(右)过程,我们发现学习从相机拍摄的未补偿图到投影仪输入图片的反映射

网络训练和光学补偿的流程如下图3所示:
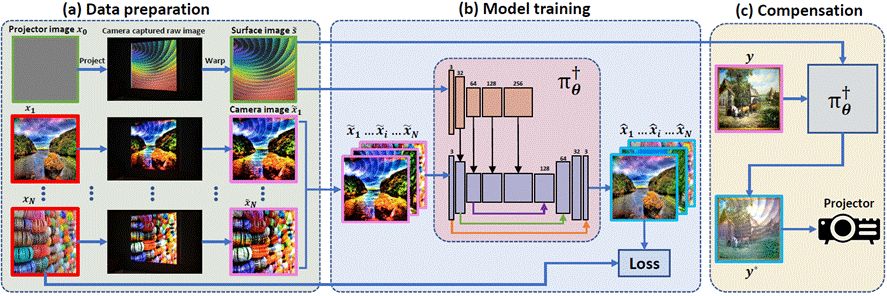
图3. 网络训练和光学补偿的流程图。(a) 投影然后拍摄一张投影表面的图和一系列具有纹理的采样图。(b) 用拍摄到和投射的图片对训练CompenNet 



实验结果

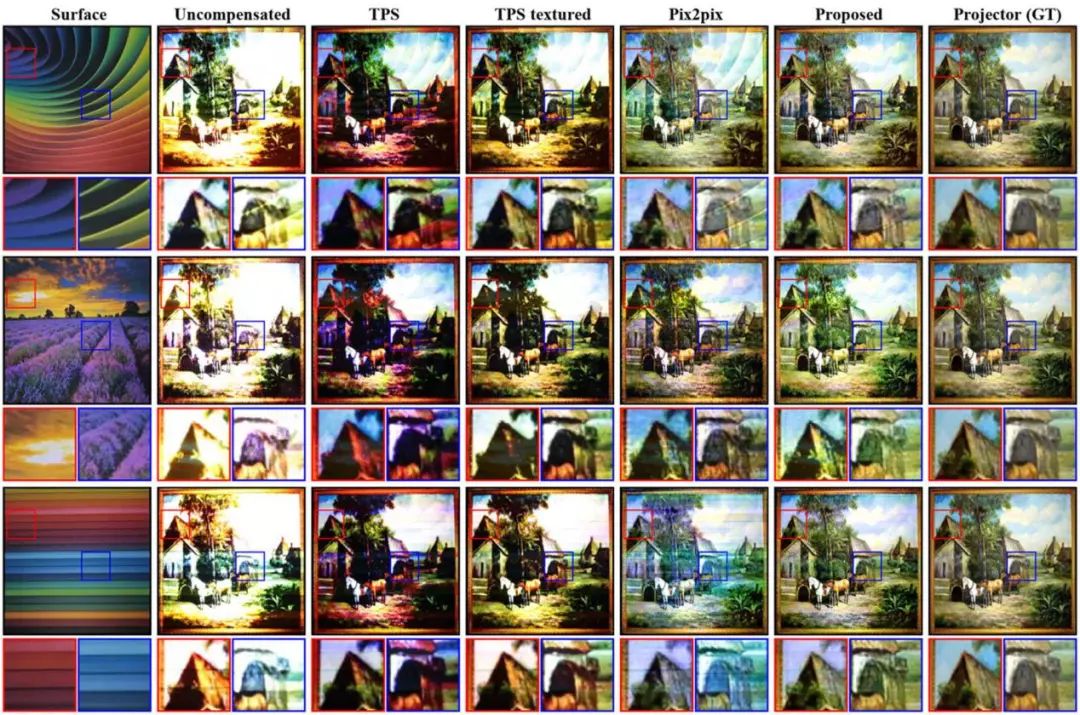
图4. 相机拍摄的补偿效果比较。第一列:投影仪屏幕表面纹理。第二列:相机拍摄的未补偿效果。第三到第六列,相机拍摄的不同补偿方法补偿后的效果。第七列,投影仪的输入,即想要用户看到的效果。
表1. 不同补偿方法的数值比较,以下数值是平均了来自于24个不同环境设置,即光照,投影仪、相机姿态和投影仪表面纹理的结果。每个环境设置有500张训练图,200张测试图。可以明显看到在投影仪光学补偿任务上,我们的方法优于传统方法和pix2pix。
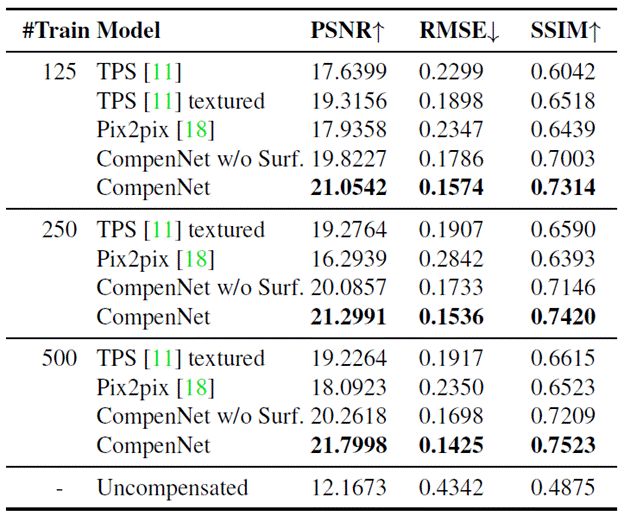
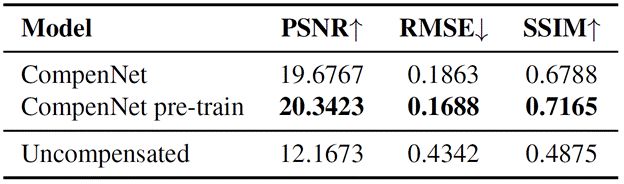
表2. CompenNet预训练与从新训练的比较。我们只采用32个训练样本并只训练500个循环,总共耗时170秒。可以明显看到,微调预训练模型的结果优于从新训练CompenNet,而且因为只需要少量样本和训练时间,在实际使用中也更便捷。
进一步了解请查看详情:
论文:
https://arxiv.org/pdf/1904.04335.pdf
补充材料:
http://www.dabi.temple.edu/~hbling/publication/CompenNet_sup.pdf
源代码:
https://github.com/BingyaoHuang/CompenNet
推荐阅读

最新AI干货,我在看