车载以太网的研究与分析丨厚势汽车

厚势按:文章基于车载网络技术的发展,阐述车载以太网应用的迫切需求,车载以太网标准协议解析、行业标准化状况以及车载以太网相关测试等。
本文来自 2018 年 3 月 20 日出版的《 汽车电器 》,作者是长城汽车股份有限公司技术中心河北省汽车工程技术研究中心的李志涛。
伴随着汽车电子产品的不断增多,车内电控系统规模和复杂性日益增加,ECU 数量也不断攀升。据统计,1996 年,欧美典型的车辆上 ECU 数量为 6 个,到 2009 年,欧美高端车的控制器数量已经大于 70 个。同时,新的功能需求对车载网络提出不同要求,如高带宽、安全性、低成本等,而传统 CAN 总线已经满足不了日益增加的新需求。
驾乘者对智能汽车(含信息娱乐和通信)期待越来越高 [1],采用满足需求的新型车载总线迫在眉睫。随着 2011 年 Broadcom 公司推出第一款满足车载 EMC 要求的车载 Ethernet 芯片以来,越来越多的整车厂将目光投向车载 Ethernet 技术。通过 Ethernet 的高带宽,可实现快速程序刷新、音频、视频等流媒体传输以及车辆的主干网。
1. 车载总线网络概述
传统的车载网络主要有 LIN、CAN、FlexRay 及 MOST:
LIN 总线适合用于汽车车窗、天窗、座椅、车内照明等通信速度较低的应用场景,在满足通信速度需求与无需 CAN 总线性能的同时可进一步降低网络成本,因此在现代汽车应用中通常作为 CAN 总线的补充网络。
CAN 总线是一个性能稳健并久经车辆实践应用的网络,具备成本低与高可靠性特点,已成为各汽车制造商车载网络设计应用的首选网络。
FlexRay 提供两个独立信道,采用双信道冗余结构,基于时间发送报文,所有节点共享高准确时基,实现最高级别的可靠性,该总线用于满足汽车环境下独特的网络需求,支持重要的安全线控技术应用,如线控转向、线控制动等。
MOST 用于满足车载信息娱乐应用的特殊需求,内置流媒体数据信道,高数据带宽,支持多种光纤电缆布线方式,EMC 性能良好,主要应用于汽车音频、视频数据传输。
依据相关车载总线各自特点,在汽车网络中实现不同的应用。现有车载总线主要技术特点见表 1。
表 1 现有车载总线主要技术特点

随着汽车科技化、智能化、网络化的不断发展,汽车 ADAS 系统、高清车载娱乐系统、车联网系统、云服务及大数据等新兴技术在车辆上的应用,现有车载总线无法满足当前需求,亟需一种高带宽、可开放、可扩展、兼容性强及网络聚合便捷的车载网络,同时满足车载严格法规要求、车载电气环境、高可靠性要求。因此,一种新型车载网络(车载以太网)应运而生。车载以太网是一种连接车内电子单元的新型局域网技术,与普通民用以太网使用 4 对非屏蔽双绞线电缆不同,车载以太网在单对非屏蔽双绞线上可实现 100 Mbit/s 甚至 1 Gbit/s 的数据传输速率,同时满足汽车行业高可靠性、低电磁辐射、低功耗、带宽分配、低延迟以及同步实时性等方面的要求。
车载以太网被众多主机厂与研究机构定义为下一代车载局域网络技术,其发展迅猛,各主机厂纷纷表示出浓厚的兴趣并投入巨大的研发力度。针对车载以太网,宝马汽车从 2005 年开始介入以太网技术的研发。2010 年,宝马汽车和半导体供应商博通公司共同提出了汽车以太网技术。2013 年在宝马 X5 的 360 度全景泊车系统中应用以太网技术,宝马汽车视其为下一代车载网络的关键技术并投入了巨大资源进行研发。车载以太网与其它总结技术相比优势明显,在汽车网络通信方面的应用,解决了当前总线技术的技术难题。
2. 车载以太网协议架构
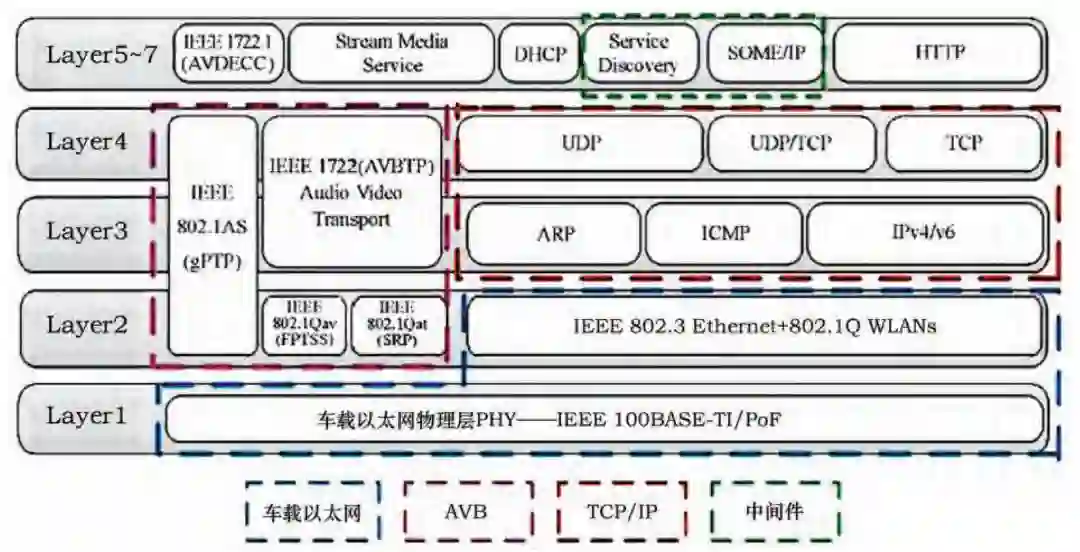
图 1 车载以太网协议技术架构
车载以太网协议是一组多个不同层次上的协议簇,但通常被认为是一个 4 层协议系统:应用层、传输层、网络层、数据链路层,每一层具有不同的功能 [2]。4 层结构对应于 OSI 参考模型,并且提供了各种协议框架下形成的协议簇及高层应用程序,车载以太网及其支持的上层协议的技术架构见图 1。
2.1 物理层(OABR)
参照 OSI 模型,车载以太网在物理层,即第 1、第 2 层采用了博通公司的 BroadR-Reach 技术,BroadR-Reach 的物理层(PHY)技术由 OPEN(一对以太网)联盟推动,因此有时也被称为 OPEN 联盟 BroadR-Reach(OABR)。
BroadR-Reach 提供标准以太网的 MAC 层接口,因而能够使用与其它以太网类型相同的数据链路层逻辑功能及帧格式,能够通过与其他以太网类型相同的方式运行高层协议和软件。
BroadR-Reach 利用两组编码和信令方法将 MAC 层 100 Mb/s 的数据流转换成 66 Mbaud/s 的三元信号,可使 100 Mb/s 的数据速率能够在较低的频率范围内实现,从而使得 BroadR-Reach 以较低的布线成本实现高数据速率。BroadR-Reach 在单对非屏蔽双绞线上传输差分信号,与 CAN 等其他车载网络类似,同时 BroadR-Reach 能够为网络提供电流隔离,其接地偏移额定值高达 2500 V。
BroadR-Reach 支持全双工通信,可使一条链路上的两个车载以太网节点能够同时发送和接收数据。BroadR-Reach 利用先进的数字信号处理技术实现一条链路上的两个节点能够同时在该链路中发送和接收数据,包括使用混合电缆等特殊设备和回音抵消等技术,使各以太网节点能够区分发送和接收的数据。
以上先进技术在车载以太网上的应用,使得 BroadR-Reach 物理层与传统车载 CAN、LIN、Flexray 网络相比,区别巨大且更加复杂,使得车载网络开发、测试工程师的相关经验不易在车载以太网开发测试工作上移植、应用。
2.2 AVB 协议簇
汽车在信息娱乐与驾驶辅助领域的快速发展,需要更多的音视频数据在汽车系统中进行传输,因此基于以太网的音视频桥接(AVB)技术得到应用。
AVB 的高带宽和服务品质,确保数据的及时传递、更高的可靠性与较低的成本、开放的技术标准等特点,非常适合通过 AVB 协议应用在汽车部署中。
AVB 协议簇包括为精准时钟定时和同步协议(gPTP)、流预留协议(SRP)、时间敏感流的转发和排队协议(FQTSS)及音视频传输协议(AVBTP)。
2.3 TCP/IP 协议簇
TCP/IP 协议簇对应 OSI 模型的传输层,该部分是网络结构的中心部分,是下方硬件相关层和上方软件处理层的重要连接点。
TCP/IP 协议负责提供一些重要的服务以使高层的软件应用能够在互联网络中起作用,充当高层应用需求和网络层协议之间的桥梁。TCP/IP 主要负责主机到主机之间的端到端通信。两个关键的传输协议为用户数据报协议(UDP)和传输控制协议(TCP)。
2.4 应用层协议
应用层协议是用户与网络的交互界面,负责处理网络特定的细节信息覆盖了 OSI 参考模型的第 5 层至第 7 层。
应用层可根据用户需求为用户提供多种应用协议,如超文本传输协议(HTTP)、通信控制(SOME/IP)、服务发现(Service Discovery)、动态主机配置协议(DHCP)、流媒体服务(Stream Media Service)、设备发现、连接管理和控制协议(IEEE 1722.1)等。
3. 车载以太网标准化及应用
汽车智能网联的应用,需支持多种系统和设备,同时需具备内、外网络聚合能力,车载网络必须是可扩展的,具有良好的兼容性,因此车载以太网在实现和创新车内应用过程中,标准化是一个重要的驱动因素。通过标准化,可以让 OEM 满足顾客需求,并确保产品品质。各主机厂依据标准来设计,不仅可以缩短产品的上市时间,而且还能保证产品的可用性、生命周期、升级能力以及互操作性。
3.1 车载以太网标准化现状
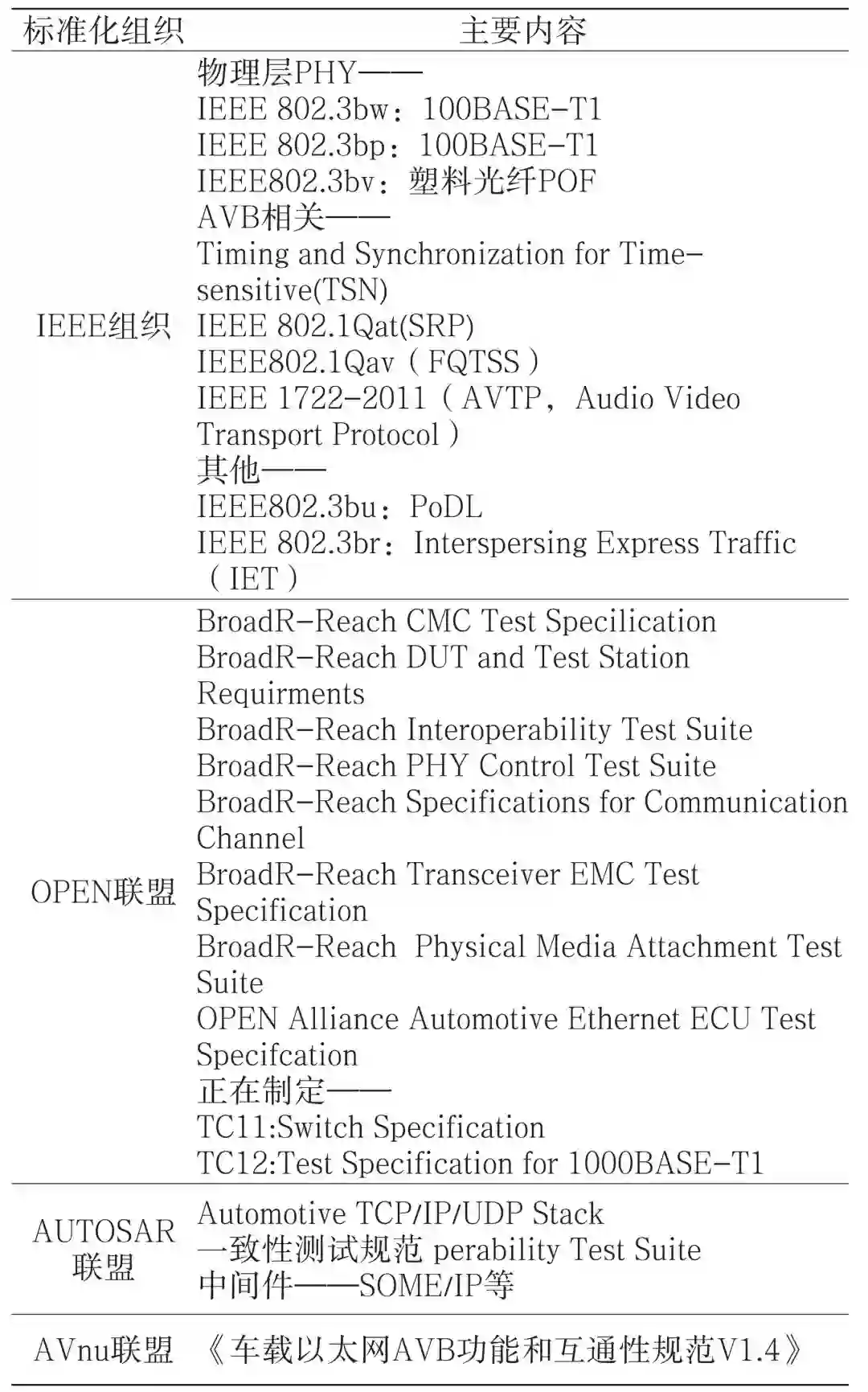
车载以太网标准化主要由 IEEE802.3 和 IEEE802.1 工作组、AUTOSAR 联盟、OPEN 联盟及 AVnu 联盟起到主要的推动作用,标准化情况汇总见表 2 [3]。
表 2 车载以太网标准化现状
3.2 车载以太网应用
车载以太网被定义为下一代车载局域网络技术,短期内无法全部取代现有车载网络,其在汽车行业上的应用需要一个循序渐进的过程。依据车载以太网在汽车网络上的应用过程,大致可分为 3 个阶段:局部网络阶段、子网络阶段、多子网络阶段。
局部网络阶段,可单独在某个子系统上应用车载以太网技术,实现子系统功能,如基于 DoIP 协议的 OBD 诊断、使用 IP 协议的摄像头等;
子网络阶段,可将某几个子系统进行整合,构建车载以太网子系统,实现各子系统的功能,如基于 AVB 协议的多媒体娱乐及显示系统、ADAS 系统等;
多子网络阶段,将多个子网络进行整合,车载以太网作为车载骨干网,集成动力、底盘、车身、娱乐等整车各个域的功能,形成整车级车载以太网络架构,实现车载以太网在车载局域网络上的全面应用。
4. 车载以太网测试
随着汽车数量的不断增加,人们对汽车的功能性和安全性的要求也不断提高 [4]。汽车的高品质、高可靠性以及高安全性需要充分完整的测试进行保证,车载以太网研发过程中应尽早快速、有效地发现问题并早期解决问题,降低成本损失。
4.1 传统以太网与车载以太网测试区别
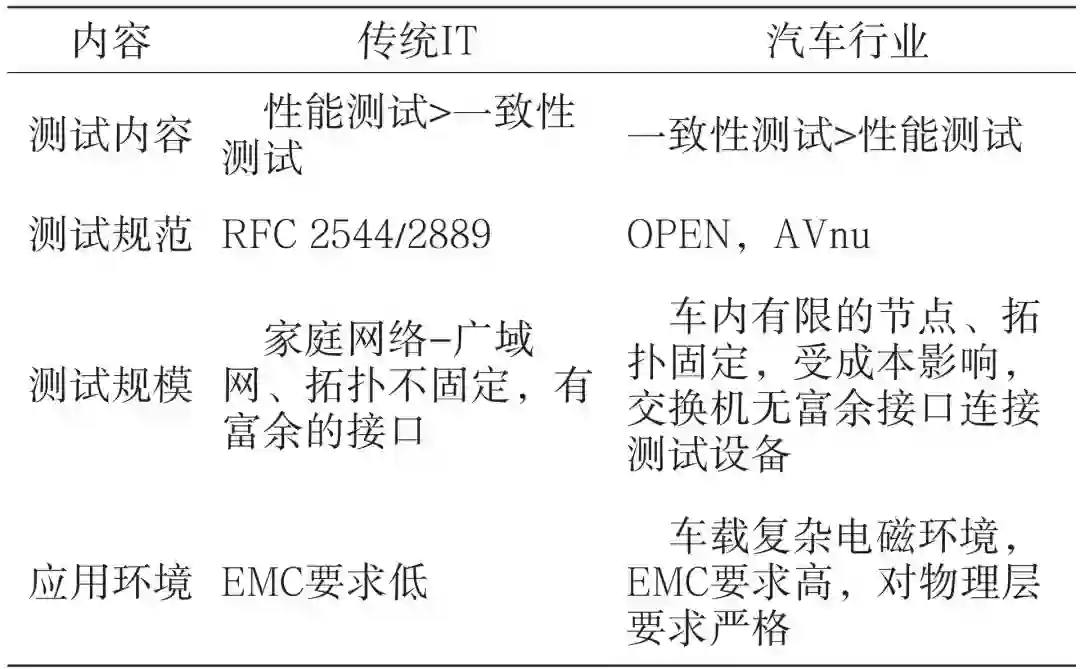
以太网是计算机有线网络标准之一,一般用于家庭和工作单位所用的 LAN 是最常用的技术标准 [5]。传统以太网测试与车载以太网测试存在一定的差异。如传统的 IT 行业对以太网一致性要求不高,无一致性测试标准,汽车行业对车载以太网测试要求高,已由相应的组织或联盟制定了行业的一致性测试标准。相应测试对比信息见表 3。
表 3 传统以太网与车载以太网测试区别
4.2 车载以太网测试内容
车载以太网面对激增的功能和复杂度,在保证高度测试覆盖率的同时,通过标准化测试降低测试周期和成本。主要测试报告物理层测试、一致性测试、性能测试、功能测试、网络安全测试以及一些基础测试,相关测试项见表 4。
车载以太网测试可参照国际通用的 V 模型,测试阶段分为部件测试、系统测试、实车测试。各阶段主要测试内容可分为一致性测试、性能测试、OEM 定义的测试内容:
一致性测试内容主要为标准一致性、互操作性、稳定性和鲁棒性测试;
性能测试主要进行仿真真实通信场景测试、功能测试、多种度量方法分析(例如延迟、吞吐量、抖动、丢包、服务质量、时间同步等)。
部件测试包含 AVnu 定义的相关测试、OEM 自定义的测试、OPENTC8 定义的相关测试等;
系统测试包含通信测试、诊断测试、网络管理测试、网关路由测试、刷写测试以及 Feature 相关测试等;
实车测试主要包含以太网 Feature 相关测试、OEM 定义的测试内容等。
车载以太网的基础测试与网络安全测试贯穿于测试流程的各个阶段。
5. 结束语
随着车载以太网技术的发展与标准化组织的推动,汽车智能化与网络化的迫切需求,车载以太网正以不可逆转的趋势向汽车行业渗透、应用,其拥有未来移动互联汽车的安全、绿色、互联要素,强大的兼容性、扩展性、融合能力和开放的架构。通过文献研究和显著的行业内兴趣可以预见,以太网是最有可能也最有前途成为下一代汽车网络的标准 [6]。车载以太网未来必将在车辆上得到广泛应用。
参考文献
[1] Bob Fust. 车载以太网:智能驱动未来[J]. 中国集成电路,2014,8(183):83
[2] IEEE Computer Society,IEEE Std.802.11s-2011: Standard for Local and metropolitan area networks,Part 11: Wireless LAN Medium Access Control(MAC)and Physical Layer(PHY)specifications,Amendment 10: Mesh Networking[S]. IEEE Computer Society Std,September 2011
[3] 李巍,张丽静,王燕芳. 车载以太网技术及标准化[J]. 电信网技术,2016,6(6):2-3
[4] 刘德利,孙运玺,谷原野. 基于开发思维的测试用例设计方法[J]. 汽车电器,2016(10):55-56
[5] 王建萍. 车载以太网[J]. 汽车与配件,2015(8):54-55
[6] 呼布钦. 下一代汽车网络:车载以太网技术现状与发展[J]. 计算机工程与应用,2016,52(24):34-35
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
sasa@ihoushi.com

点击阅读原文,查看文章「中国燃料电池汽车发展问题研究」



