全国首个路侧全息感知与车路协同的智慧高速开放道路项目启用,希迪智驾助力长沙智能驾驶第一城
9月26日,开放道路智能驾驶长沙示范区启用仪式在梅溪湖南广场隆重举行,标志着湖南湘江新区100公里智慧高速项目的正式启用。长沙市委副书记、市长、湖南湘江新区党工委书记胡忠雄,市委副书记朱健,长沙市副市长、市公安局局长唐向阳,湘江新区党工委委员、管委会副主任凌勤杰出席活动。

长沙市委副书记、市长、湖南湘江新区党工委书记胡忠雄参观希迪智驾展台
希迪智驾作为湖南智能网联汽车产业的排头兵,凭借在车路协同领域扎实的基本功、大量的实际路测验证、快速闭环的能力,深度参与了100公里智慧高速项目的落地,为智慧高速建设提供了整套全新的车路协同路侧全息感知解决方案。

智慧高速项目分为标准路段、试验路段和示范路段,选址长益复线长沙段、绕城高速西南段、绕城高速西北段三段开放性道路,属国内首创。项目通过建设外场路侧系统、业务应用与大数据分析云控平台、云控平台的软硬件支撑平台以及相关配套工程,打造基于车路协同的智能网联汽车试验与应用示范智慧高速。
智慧高速总体定位为建设支持L3级及以上高级自动驾驶的开放式车-路协同高速公路环境,可满足智能网联汽车的规模化研发测试,以及高速公路运营、监管及用户出行信息服务的需求。部分路段已布局5G网络,路侧设备可全息感知高速环境,形成车-路-云一体化协同系统,打造测试、应用场景100多个。
智慧高速项目弥补了国内高速道路缺乏测评、示范环境的空缺。主机厂可以从自车行为、环境信息、道路交通信息、交通参与者四个维度检测整个系统的安全性和可靠性,同时通过车-路-云一体化的技术路线提升高速公路的运行和监管质量。
为保证区域化全息感知效果,智慧高速建设过程中,希迪智驾针对每个关键节点部署其整套V2X路侧感知系统,涵盖了希迪智驾网联化信息发布的智能路侧设备(RSU)、路侧复杂数据计算融合的智能交通感知边缘计算单元(TPCU),以及负责感知的智能交通跟踪雷达和智能交通感知摄像头等智能化V2X系列产品。

项目中使用的主要V2X智能化设备
该系统能够同时实现车辆行驶主动安全、道路事件预警与行驶引导、道路信息提示、主动救援辅助等多类场景的应用,经过长期的路侧实际数据积累和多种实车模型的搭建,已经在功能性、适应性和鲁棒性等方面达到国家领先水平。
立足于绕城高速公路的特定测试环境以及其车流大、车速快的特点,希迪智驾提出了“超视距”感知的理念,并围绕其设计开发了主动超视距视频传输、超视距可行使区域检测和超视距障碍物感知三个重要感知模块,旨在为有限的车载端视线范围(肉眼限制或自动驾驶感知范围受限)提供一种提前感知前方路况的能力,从而通过传感器接入技术、数据融合技术、车联网V2X技术以及大数据分析处理技术为驾驶员赋能“千里眼”,有效增强驾驶安全性,提升驾驶体验,同时也可对道路利用率、通行效率产生积极影响。

基于路侧安装的摄像头,能够主动获取各个关键节点处的视频流数据,对车辆观测方向中500-800m区域内的车辆、行人等环境实现全局获取,该类数据一方面将通过数据处理和分析生成相应的警示信息实现路-车发布和路-云上报,另一方面,该视频流也能够搭载于短距离无线通信方式和特殊协议实现视频流的传输。即将驶入该区域的车辆能够实时接收到前方路况视频信息,为驾驶员提供实时有效的路况信息。
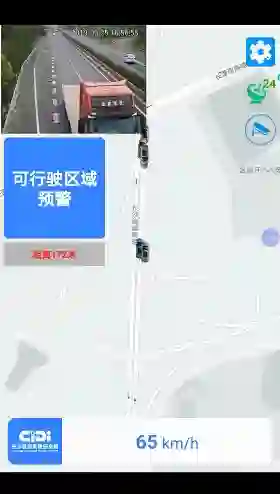
道路施工、路面坑洼、交通事故等特殊事件的发生将导致道路的可行驶区域实时发生变化,会干扰正常行车,引发交通事故。路侧感知设备将感知可行使区域的变化,通过V2X广播给接近的车辆,提醒车辆提前变道,避免追尾等交通事故。
在视距范围以外的高速公路上有倒车逆行、紧急停车等异常车辆时,路侧设备可以提前感知并将该位置信息通过V2X广播给接近的车辆。这将大大缩短车辆检测时间,并将检测结果进行及时预警和上报管理中心,能快速对该事件进行处理、预防二次事故的发生。

高速场景中当有行人闯入行走时,对行人和行车都将有极大的安全隐患,通过超视距行人检测功能路侧设备可以提前感知行人位置并通过V2X广播给附近车辆,提醒其提前决策,同时将行人闯入异常信息上报至云控管理中心,第一时间为监管单位提供事件处置信息。

鉴于感知盲区、肉眼视距限制等原因,高速干道的汇入汇出、隧道进出口无论对于普通车辆还是自动驾驶车辆来说,都是交通事故高发地段,同时该区域的交通状况直接影响着高速通车效率。希迪智驾路侧全息感知系统对以上关键节点的实时态势感知、拥堵预测、应急事件检测,能够有效解决自动驾驶测试道路安全及交通效率问题,同时也提升了交通监测与管理能力。
车辆驶进隧道前,因视野中隧道洞口亮度低造成黑洞效应,隧道口内形成盲区,通过在隧道入口处安装感知设备,感知隧道口附近障碍物、异常车辆等,提高行车的安全性,提前将异常信息通过V2X发送给接近车辆。

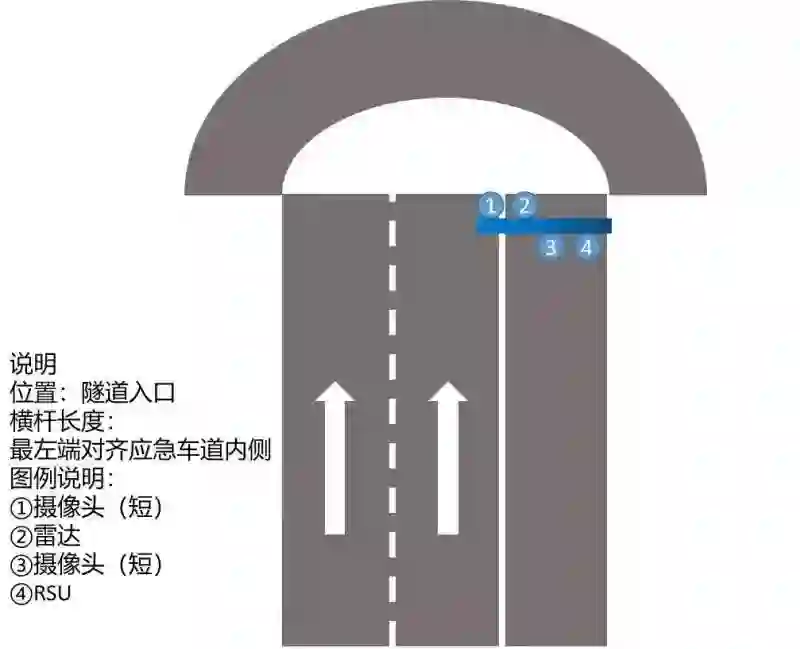
鉴于隧道入口的特点,方案将在隧洞前5m处以壁挂方式设置横杆(无法立杆)。观测主体为隧道内部100m的实时路况,用以消除黑洞效应对驾驶员或自动驾驶车辆摄像头所造成的不利影响,此外还设置了一个摄像头对隧道外部100m内的异常驾驶车辆或异常闯入的施工人员进行实时捕获,用以保障驾驶安全。
当车辆驶出隧道时,由暗处到达亮处形成白洞效应,隧道外对驾驶员形成盲区。通过在隧道出口处安装感知设置,感知隧道出口外的环境,将异常情况通过V2X发送给接近隧道出口的车辆,提高行车安全。

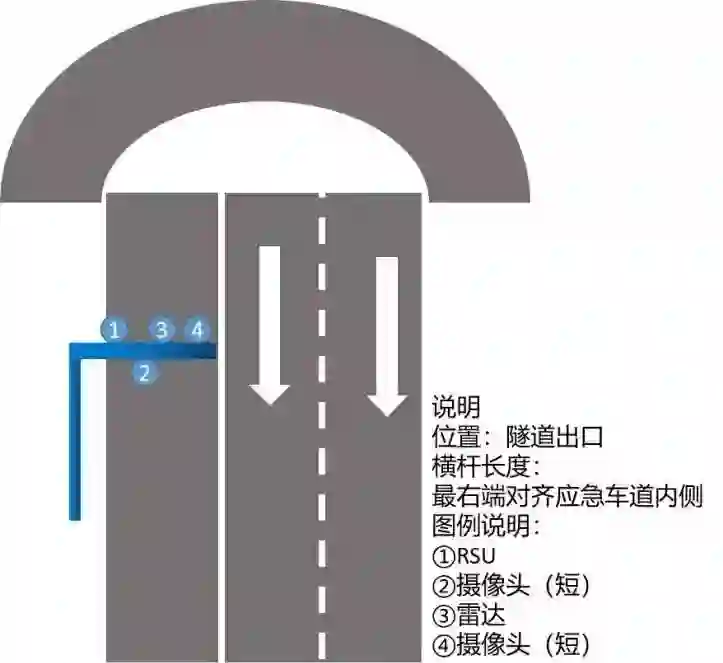
与隧道入口类似,将在隧洞外侧100m处设置横杆,其观测主体为隧道外部100m的实时路况,同时也设置了另一个摄像头对隧道外部100m-200m内的特殊工况进行检测,用以增大传感器的感知范围。
高速公路匝道汇入口车流量大,行车视距小,车辆从匝道汇入时,易导致变道发生碰撞。同时,对高速上行驶的自动驾驶车辆而言,存在较大的单车感知盲区。通过在高速汇入区域部署高速汇流车辆通行辅助等功能,可减少车辆碰撞事故,有效地保证在高速汇入处的行车安全。

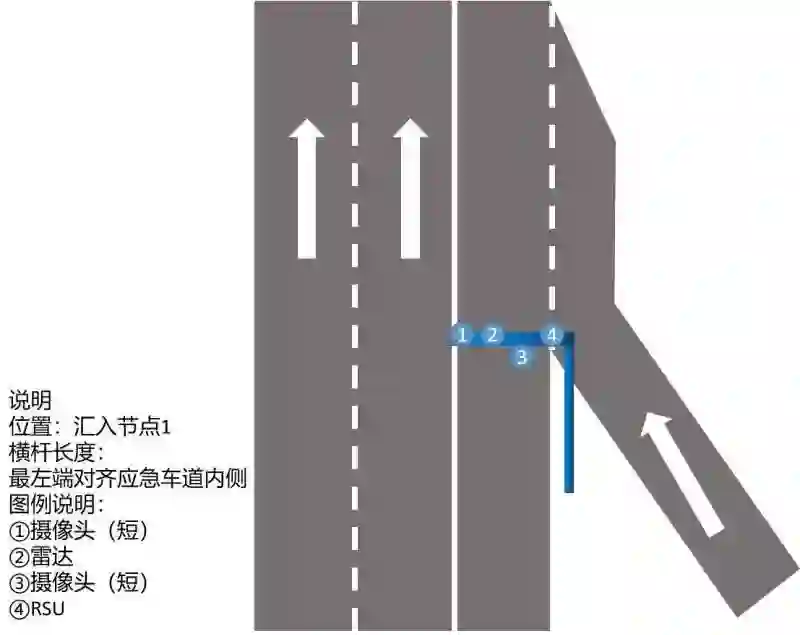
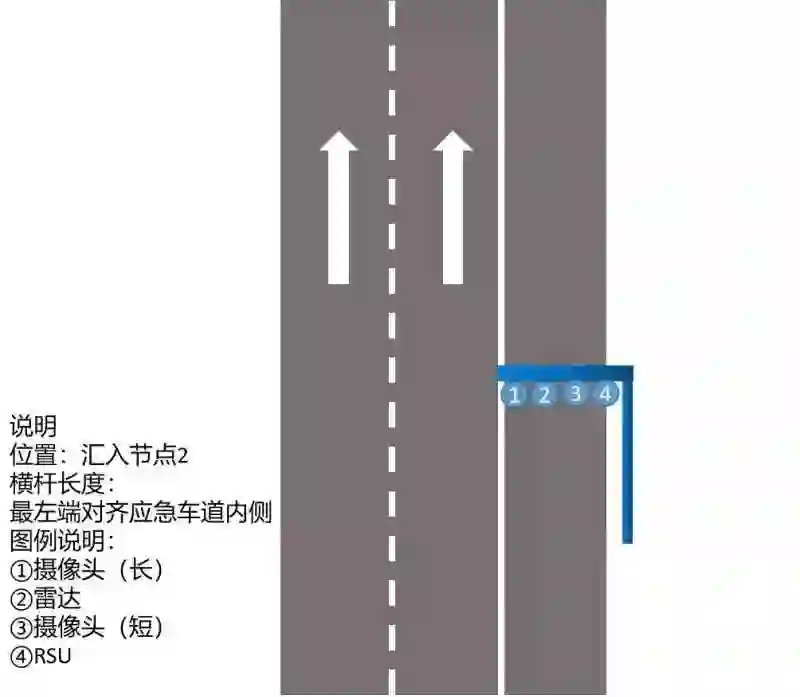
每个汇入区域(加速车道始末)覆盖范围约为300m,如果单设一个杆件进行感知则将受传感器感知的局限,容易造成误报或者漏报的情况。因此,在每个汇入区域部署两个节点,每个节点部署一套路侧感知系统,其关键观测区域为杆件之间的车辆合流关键区域,在每个杆件的边缘系统中,将对杆件自带的摄像头和毫米波雷达进行高精度的数据融合,同时针对于网联车自带GPS定位的情况,也做了特殊处理,使得路侧融合体系更为完善,并通过各个RSU将感知信息实时进行发布。通过这套系统,自动驾驶车辆能够在自身不装载额外传感器的前提下也能感知到可能对其在主道行驶时产生威胁的车辆位置、方向和速度信息,并将该信息输送给自身的决策层和控制层,从而产生自动变道或加、减速等措施。
高速公路匝道出口存在大量车辆连续变道等危险驾驶行为,导致车辆在匝道口导流线区域突然减速、停车导致车辆拥堵,此区域对于自动驾驶存在巨大的安全隐患。通过在匝道汇出口部署路侧全息感知系统,能实时检测车辆的速度、位置等信息,及导流线区域异常停车、紧急变道等事件,提前将异常情况或超视距信息通过V2X发送给接近车辆。


汇出节点主要监测区域为汇出点前100m及汇出点后50m,前侧为连续变道高发区域,而后侧则为紧急制动、车辆倒车、逆行行为的多发带,如果不及时对后侧车辆进行提醒,则很容易发生交通事故,因此,杆件设置在汇出点后侧约130m处,通过摄像头和毫米波雷达的数据融合,能够对前述行为进行实时捕获,一方面通过I2V实现对后侧车辆的提醒,同时也可以通过I2N对车辆违法行为进行及时上报和抓拍等处理。
通过在不同类型的路段布置相应场景,不但能够保证车辆安全通行的需求,同时还能够满足智能网联车辆的测试需求。整个智慧高速部署场景如下表所示。

路侧智能化以及边缘云计算系统通过上帝视角为智能驾驶车辆提供超视距路况感知功能,有效弥补因高速场景车速较快,自动驾驶车辆需要的安全感知距离超出单车智能的感知范围不足的缺陷。并且将车的部分感知和计算转移至路侧完成,能降低对自动驾驶车载传感器及车载计算平台的需求,降低其实现成本。
针对普通社会车辆,用户只需安装方案提供的APP就可以体验部分高级辅助驾驶功能,有效减少交通事故发生。希迪智驾发布的CIDI-车路协同应用程序获取道路路况信息,通过路况提前减速或调整行驶路线,以达到舒适出行的目的。
智能路侧终端接入交警数据平台,可将原始数据和本地处理的结果上传云端,通过对海量交通运行数据进行整合处理,形成分析预测模型,运用于交通调度引导、线路规划、车辆管控等方面,推动道路基础设施要素资源全面数字化、“人车客货”互联互通。用数据管理和决策为车辆的运行与监管提供全方位的支持,为提升高速公路的交通效率提供了有效的解决方案。

希迪智驾与新区共谋智能网联产业未来,团队伙伴齐心协力战酷暑,全力以赴保节点,不畏艰辛抢高地,为打造长沙“智能驾驶第一城”砥砺奋进,为献礼祖国七十华诞铿锵前行。




