首个实时单目3D目标检测算法:RTM3D,代码将开源
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
基于单目图像的3D目标检测是在输入RGB图像的情况下估计目标的3D包围框,在自动驾驶领域非常有用。
今天来自中科院沈阳自动化所等单位的学者公布论文提出一种实时的单目3D目标检测算法RTM3D,快速版30fps,并且代码将开源。
以下是作者信息:
RTM3D算法的主要思路,如图:
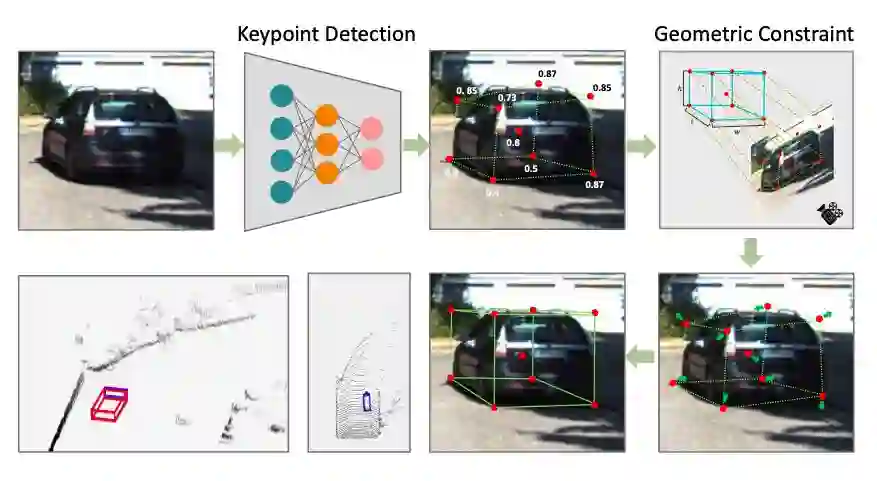
输入RGB图像,经过深度神经网络,预测目标的9个空间点(1个中心点,8个顶点),使用几何限制估计更加精确的9个空间点,进而找到目标的3D包围框。
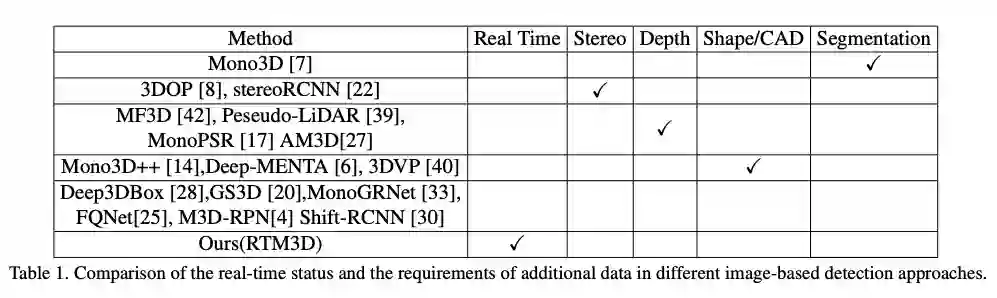
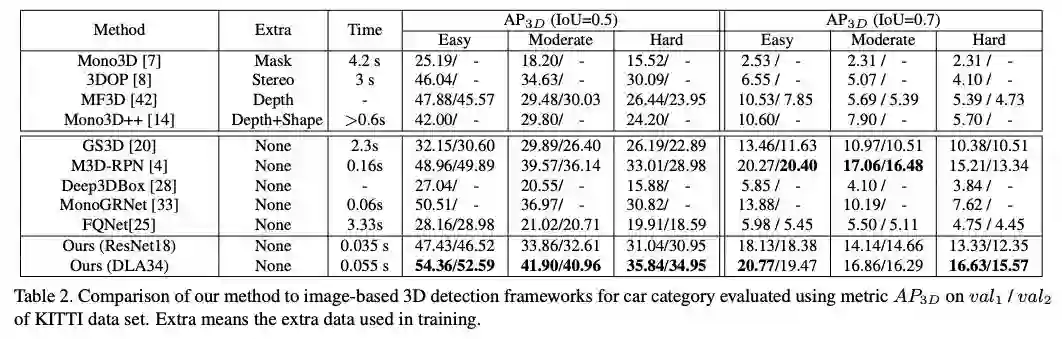
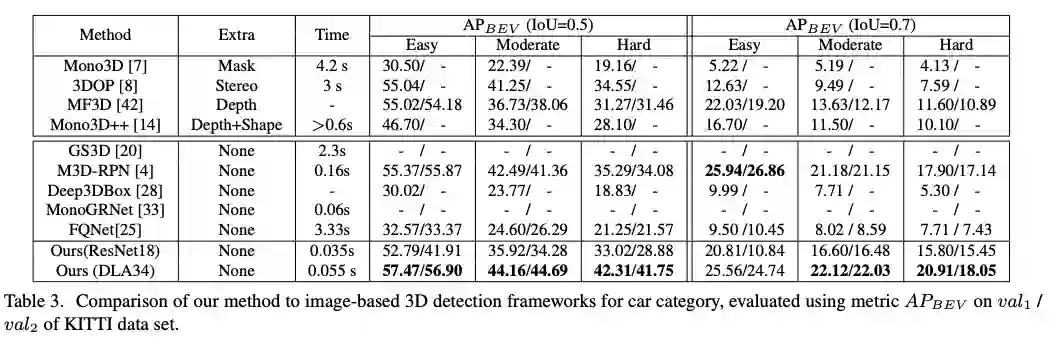
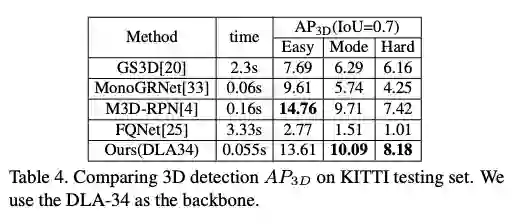
下表为该文算法与其他3D目标检测方法比较,RTM3D不需要其他外部数据,而且速度达到实时。
算法架构图:

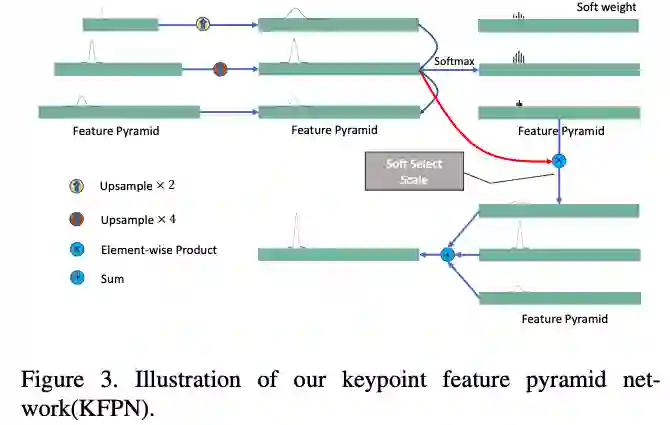
实验结果
在KITTI数据集上的实验结果,该算法在精度达到SOTA的同时,是目前少数达到实时的3D目标检测算法。
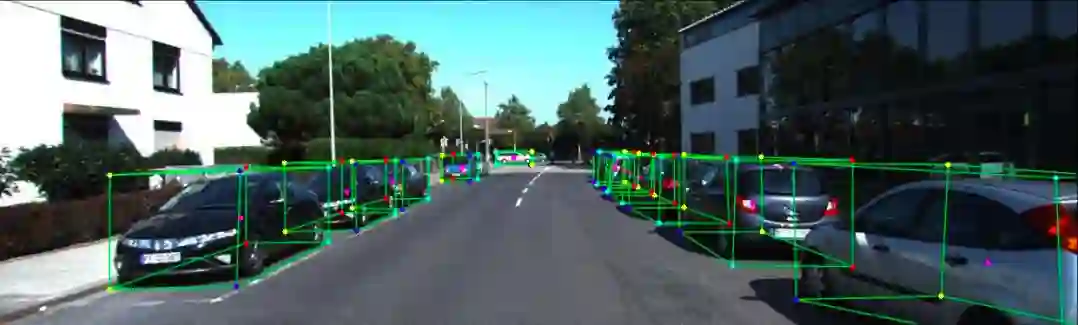
检测结果示例:

论文地址:
https://arxiv.xilesou.top/pdf/2001.03343.pdf
代码地址:
https://github.com/Banconxuan/RTM3D
目前代码还未放出,期待早日开源。
交流群
欢迎加入公众号读者群一起和同行交流,目前覆盖SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、Re-id、强化学习、模型压缩剪枝、医学影像、GAN、算法竞赛等微信群,请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
推荐阅读
最新AI干货,我在看

登录查看更多
相关内容
专知会员服务
27+阅读 · 2020年1月17日



相关VIP内容
专知会员服务
27+阅读 · 2020年1月17日
相关资讯
相关论文