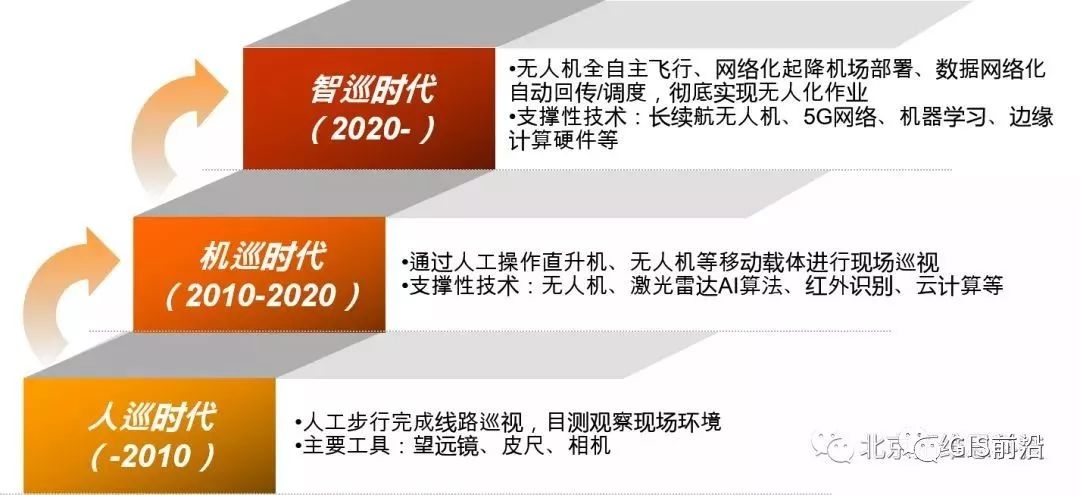
运用LiDAR、RTK和深度学习无人机将全自主电网巡检,进入智巡时代
长久以来,我国电网庞大的输电线路网络巡检工作主要依赖人工巡视方式进行。巡检成果的时效性、安全性、准确性是人巡时代长期困扰电网运维部门的难题。近些年,无人机作为一种高科技的巡检利器在电网行业中得到迅速推广与应用。飞控手通过操作无人机沿线路飞行,并同步拍照或者激光扫描,结合智能AI数据处理软件,可以快速、准确地发掘线路中的隐患缺陷。随着全国电网行业无人机数量、飞手数量及技能水平的不断提升,我们可以认为,电网巡检的机巡时代已全面到来。
无人机的使用帮助巡检班组人员提高了巡检效率,但是新的工作方式也带来了新的挑战。无人机巡检需要对无人机长时间的飞行控制操作,这对于基层班组人员的无人机操作技能要求可不低。“炸机”、“撞塔”等事故的发生也随着机巡业务的扩大而与日俱增。在安全飞行的前提下,同一条线路在高手和新手飞过以后也可能产生迥异的巡视结论。行业迫切需要更加智能、更加安全、更加可控的巡检作业方式。降低无人机操作门槛,降低人员经验对于巡检工作的影响,进一步提升机巡作业效率,必将成为业界追随的技术趋势。“无人机全自主飞行”、“网络化起降机场”、“机器学习”、“边缘计算硬件”等新一代技术的攻克,将翻开电网巡检的下一篇章:智巡时代(见图1)。
2018年10月11日,在山东聊城“聊长III线“现场,山东电力机巡作业中心人员顺利完成了国家电网首次全自主精细化巡检作业(见图2)。在无飞手操控的模式下,无人机载仅仅10分钟内完成2基双回杆塔的精细化巡检,同时完成了杆塔关键部位的拍照,拍摄角度、距离控制基本合理,清晰度满足分析要求。“这个速度比最优秀的飞手还快一倍,巡检效率是平时人工操控无人机的2倍”,现场人员称赞道。
 图2 无人机自动化巡检作业现场
图2 无人机自动化巡检作业现场
那么如此智能的无人机巡检作业,是如何实现的呢?简单来说,只需要三步。
第一步,建立厘米级精度的三维点云地图(见图3)。即通过激光雷达获取线路走廊内的高精度三维点云作为基础三维地图,随后使用AI算法自动识别提取关键特征(杆塔、导线、绝缘子等)的空间参数,最后自动关联电网资产数据库中的台账记录;

▲ 图3 基于三维激光点云的厘米级三维地图
第二步,基于三维地图进行复杂航迹规划。借助深度学习算法帮助实现杆塔本体精细化巡检的拍照点自动化精准选定,形成平滑连接各拍照点的飞行航迹,并上传至无人机飞控系统中(见图4)。
▲ 图4 无人机自主飞行复杂航迹规划
(图片来源:广东机巡 )
第三步,无人机依据规划的飞行航迹,在RTK厘米级精度定位信号下进行复杂业务自主飞行,并借助激光雷达进行自主导航避障。
电网无人机自动化巡检充分运用了激光雷达(LiDAR)技术、实时动态高精度定位(RTK)技术、深度学习算法,不再依赖飞行人员的无人机操控技术和经验,而是完全自主飞行实现电网的精细化巡检。 其中运用了LiDAR、 RTK、深度学习等一系列黑科技,那么这些黑科技到底是什么呢?
LiDAR是Light Detection And Ranging的英文缩写,即激光探测与测量,俗称激光雷达。其工作原理是通过激光器发射一连串离散的激光脉冲打在物体上,并反射回来被接收器接收,这样就可以准确地计算出激光脉冲往返一次的传播时间。其中激光脉冲的传播速度是光速,激光器与物体点的距离可以由激光脉冲的传播时间与光速相乘得到,从而可以计算出每一个物体激光脚点的三维坐标。当然机载激光扫描还要考虑飞机的航高、GPS坐标位置以及惯性测量装置IMU的姿态数据(俯仰角度φ、侧滚角度ω、航偏角度κ)等参数,以此来解算物体上激光脚点的精准坐标。
机载LiDAR可快速获取输电线路通道的高精度三维点云数据,由于LiDAR具有穿透植被的特性,可帮助实现对通道内树木、地形以及杆塔、导线等的精确建模,这种高精度三维点云数据为无人机自动化巡检提供了精确的飞行导航三维地图。
无人机全自主飞行的航线就是利用激光LiDAR采集的输电线路高精度三维点云数据来规划设计的,其输出高精度WGS-84系统地理坐标的航线以供多旋翼无人机进行自主导航飞行作业。
RTK全称Real-time kinematic,即实时动态载波相位差分定位技术,是GPS差分技术的一种应用。高精度的RTK定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果, 并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时不到一秒钟。RTK说通俗点就是高速、厘米级精度的GPS系统。
由于流动站和基准站间的距离限制,常规RTK已无法满足定位精度需要,故出现了网络RTK,其利用多个基准站构成一个基准站网来获取高精度的定位结果。无人机自动化巡检就是通过网络RTK实现无人机的高精度定位导航,最终实现无人机在输电线路上精确按照规划路径进行杆塔本体的精细化巡视(见图5)。
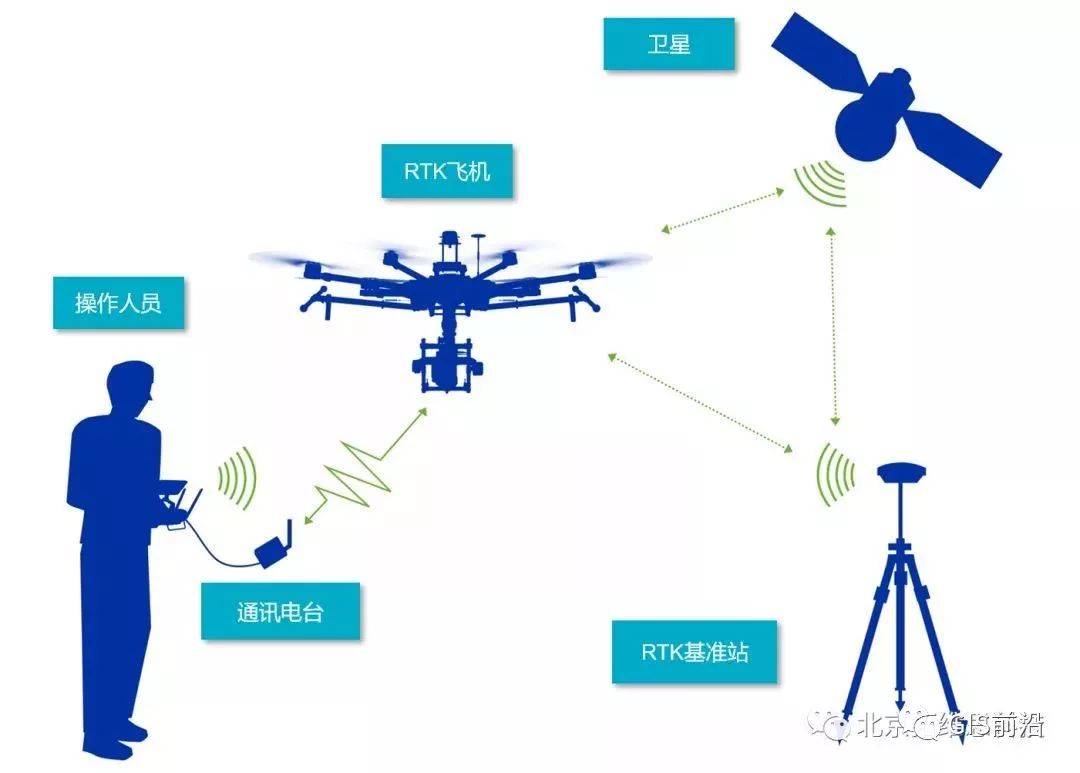
图5 RTK原理示意图
(图片来源:BENEFITS OF RTK, David Atkinson,2017)
深度学习
深度学习(Deep Learning)是机器学习的分支,是一种基于对数据进行表征学习的算法。通过基于大数据集训练网络,使其神经网络具有许多“深度”层,从而使创建的模型可对输入数据进行精确预测。深度学习的好处是用非监督式或半监督式的特征学习和分层特征提取高效算法来替代手工获取特征(见图6)。
在无人机自主巡检技术中,深度学习被两次应用其中。第一次是在基于激光LiDAR点云的航线自主规划中,深度学习算法帮助实现杆塔本体精细化巡检的拍照点自动化精准选定;第二次是在采集杆塔本体部件照片及通道走廊的照片数据库中,通过深度学习算法训练的模型,可精确识别存在缺陷隐患的照片及缺陷位置。
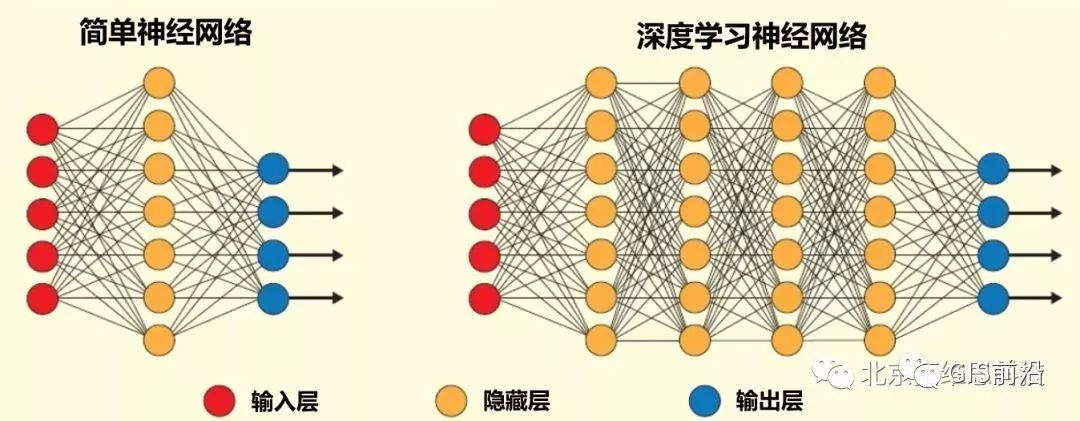
(图片来源:Deep learning hunts for signals among the noise,Chris Edwards,2017)
文章转载于北京拓维思科技
版权归原作者所有,如有侵权请告知
往期热文(点击文章标题即可直接阅读):






