强化学习表示空间中的规划
编者按:Microsoft Semantic Machines资深研究科学家、UC Berkeley计算机科学博士Jacob Andreas以控制问题为例,讨论了在强化学习的表示空间中引入规划能力的思路。
以神经网络为参数的智能体(例如Atari玩家智能体)看起来普遍缺乏规划的能力。蒙特卡洛反应式智能体(例如原始深度Q学习者)明显是个例子,甚至于具备一定隐藏状态的智能体(比如NIPS的MemN2N论文)看上去也是这样。尽管如此,类似规划的行为已成功应用于其他深度模型,尤其是在文本生成上——集束解码,乃至集束训练,看上去对机器翻译和图像描述而言不可或缺。当然,对处理并非玩具级别的控制问题的人而言,真实的规划问题无处不在。
任务和运动规划是一个好例子。有一次我们需要求解一个持续控制问题,但是直接求解(通过通用控制策略或类似TrajOpt的过程)太难了。因此我们转而尝试高度简化、手工指定的问题编码——也许是丢弃了几何信息的STRIPS表示。我们解决了(相对简单的)STRIPS规划问题,接着将其投影回运动规划空间。该投影可能不对应可行的策略!(但我们想让在任务空间中可行的策略在运动空间中尽量可行。)我们持续搜索计划空间,直到找到在运动空间中同时奏效的解。
其实这不过是一个由粗到细的剪枝计划——我们需要可以丢弃明显不可行的规划的低成本方法,这样我们可以将全部计算资源集中到确实需要模拟的情形上。
如图所示:
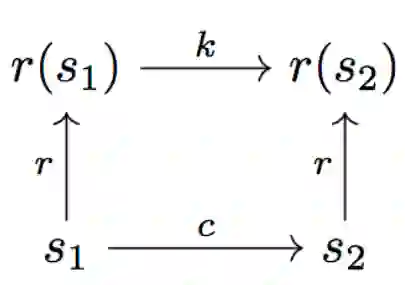
上图中,r为表示函数,c为成本函数(我们可以将其视为用0-1表示可行性判断的函数),k为“表示成本”。我们想要确保r在运动成本和任务成本上“接近同构”,也就是c(s1, s2) ≈ k(r(s1), r(s2))。
就STRIPS版本而言,假定我们手工给出r和k。不过,我们可以学习一个比STRIPS更好的求解任务和运动规划问题的表示吗?
从规划样本中学习
首先假定我们已经有了训练数据,数据为成功的运动空间路点序列(s1, s2, …, s*)。那么我们可以直接最小化以下目标函数:

最容易的情形是表示空间(r的对应域)为ℝd;这时我们可以操作d以控制表示质量和搜索表示空间的成本之间的平衡。
问题:如果我们只观测到常数c(如果只看到好的解,可能会出现这种情形),那就没有压力学习不那么微不足道的k。所以我们也需要不成功的尝试。
解码
给定训练好的模型,我们通过以下步骤求解新实例:
从表示空间中取样一个满足r(s*) ≈ rn的成本加权路径(r1,r2, ..., rn)。
将每个表示空间转换r1 → r2映射到运动空间转换s1 → s2,且满足r(s2) ≈ r2。(如果r是可微的,那么这很容易表达为一个优化问题,否则需要麻烦一点表达为策略。)
重复上述过程,直到其中之一的运动空间解可行。
在涉及计算路径的每一个步骤(不管是在r-空间还是在s-空间),我们都可以使用范围广泛的技术,包括基于优化的技术(TrajOpt),基于搜索的技术(RRT,不过大概不适用于高维情形),或者通过学习以目标状态为参数的策略。
直接从任务反馈学习
如果我们没有良好的轨迹可供学习,怎么办?只需修改之前的上面两步——从随机初始值开始,展开包含预测的r和s序列,接着生成由预测值r和s构成的序列,然后将其视作监督,同样更新k以反映观测到的成本。
提示性搜索
到目前为止,我们假设可以直接暴力搜索表示空间,直到我们接近目标。没有机制强制表示空间的接近程度同样接近于运动空间(除了r可能带来的平滑性)。我们可能想要增加额外的限制,如果根据定义ri距离rn不止3跳,那么||ri − rn||>||ri+1−rn||。这立刻提供了在表示空间中搜索的便利的启发式算法。
我们也可以在这一阶段引入辅助信息——也许是以语言或视频形式提供的意见。(接着我们需要学习另一个从意见空间到表示空间的映射。)
模块化
在STRIPS领域,定义一些不同的原语(如“移动”、“抓取”)是很常见的做法。我们也许想给智能体提供类似的不同策略的离散清单,清单上的策略列出了转换成本k1, k2, …。现在搜索问题同时牵涉(连续地)选择一组点,和(离散地)选择用于在点之间移动的成本函数/运动原语。这些原语对应的运动可能受限于配置空间中某个(手工选取)的子流形(比如,仅仅移动末端执行器,仅仅移动第一个关节)。
感谢Dylan Hadfield-Menell关于任务和运动规划的讨论。
原文地址:http://blog.jacobandreas.net/planning-representations.html





