【ECCV2020-华为】车道线架构搜索框架
车道线作为路面最主要的指示信息之一,对于自动驾驶系统中路径规划、车道保持等功能的具有至关重要的参考价值。实时准确地检测出路面的车道线,在自动驾驶领域受到广泛重视,在科研领域研究活跃。随着深度学习的发展,基于深度学习的车道线检测模型能够处理的情况越来越多,随之而来的代价就是模型越来越大,计算量越来越大,检测时间越来越长,对硬件要求越来越高。CurveLane-NAS旨在解决现阶段车道线检测模型计算量大不适宜落地的问题而设计的一种端到端的车道线架构搜索框架,在CULane等公开数据集上实现了新的SOTA。
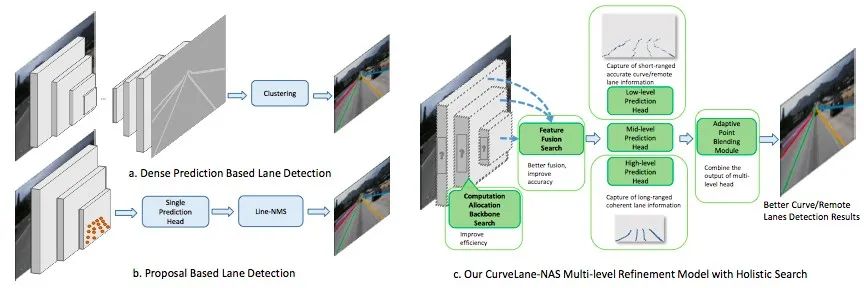
图1:主流车道线检测框架的比较
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“CULA” 可以获取《【ECCV2020-华为】车道线架构搜索框架》专知下载链接索引



登录查看更多
相关内容
Arxiv
0+阅读 · 2020年11月30日
Arxiv
0+阅读 · 2020年11月28日
Arxiv
4+阅读 · 2017年6月7日





相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2020年11月30日
Arxiv
0+阅读 · 2020年11月28日
Arxiv
4+阅读 · 2017年6月7日