【CORL2020最佳系统论文奖】可扩展多智能体强化学习学校
《SMARTS: Scalable Multi-Agent Reinforcement Learning Training School for Autonomous Driving》.
本文提出了一个完善且经过深思熟虑的系统,对自动驾驶社区具有巨大的潜在影响。
多智能体交互是现实世界中自动驾驶的基础,尽管人们已经进行了十多年的研究和发展,但如何在各种情况下与各种道路车辆(智能体)进行有效交互的问题仍未解决。Learning的方法可以为解决这个问题提供很多帮助,但是这一方法需要一个现实的多智能体模拟器,该模拟器会产生多种多样且有效的驾驶交互。为了满足这一需求,我们开发了一个专用的仿真平台:SMARTS (Scalable Multi-Agent RL Training School):可扩展多智能体强化学习学校。
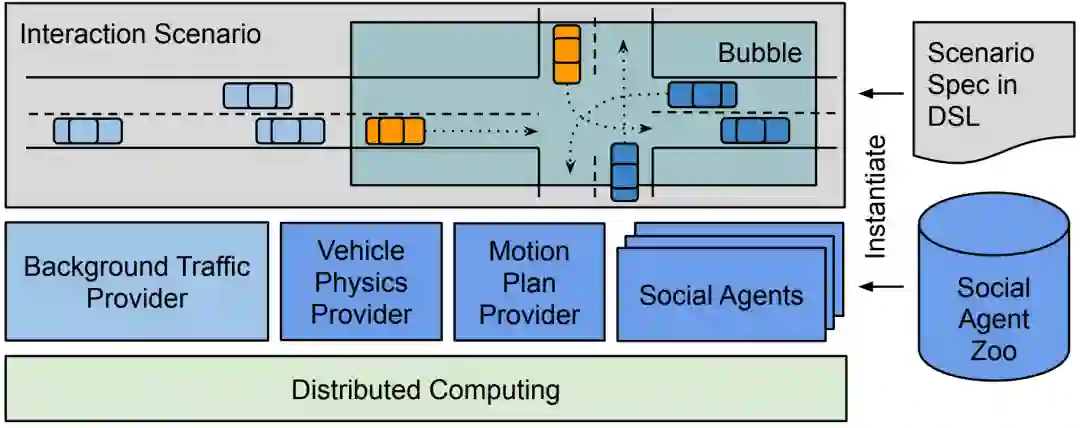
上图是SMARTS 模型架构,其交互方案是使用特定领域语言(DSL)定义的。Social智能体是从“ Social智能体Zoo”中实例化而来。橙色车辆由学智能体控制、深蓝色车辆由 Social智能体控制、浅蓝色车辆由交通服务提供商控制。原则上,所有提供程序和智能体都可以在自己的进程中运行,也可以远程运行。SMARTS支持训练、积累和使用道路用户的各种行为模型,这些反过来又可以用于创建越来越现实和多样化的交互,从而可以对多智能体交互进行更深入、更广泛的研究。在本文中,我们描述了SMARTS的设计目标,解释了SMARTS的基本体系架构和关键功能,并通过在交互场景中进行具体的多智能体实验来说明其用法。
最后,我们开源了SMARTS平台以及相关的基准测试任务和性能评估指标,以鼓励和支持针对自动驾驶的多智能体学习的研究。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“SMARTS” 就可以获取《【CORL2020最佳系统论文奖】可扩展多智能体强化学习学校》专知下载链接