动图|新一波机械原理动态图,先睹为快!
来源:机工教育
1.铣削阿基米德螺旋槽装置(Device for milling Archimedean spiral groove)
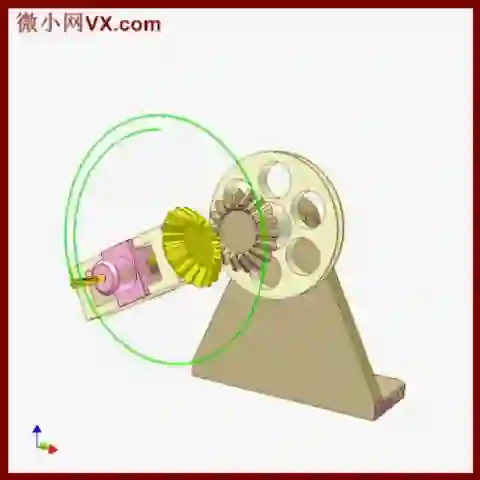
锥齿轮卫星传动和螺母-螺钉传动的结合。
2.铣削内筒表面夹具(jig for milling inner culindrical surface)

3.矫正砂轮装置(Device for Correcting Grinding Wheel)
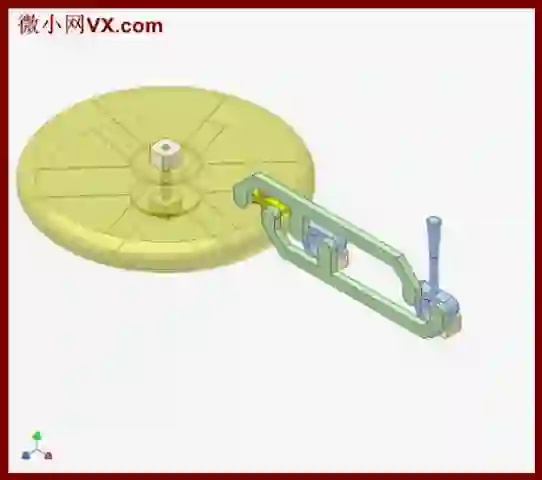
两个平行四边形机制的结合使得工具点可以绘制一个圆弧曲线。
黄色关节围绕虚拟轴旋转。
4.成型机上切削齿轮1(Cutting gear on the shaper 1)
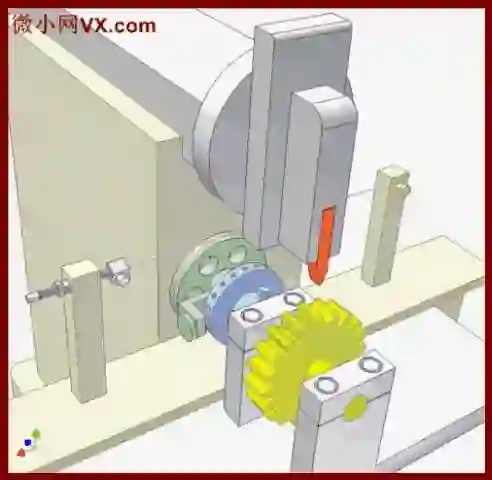
电缆和绿色盘接触的直接必须等于齿轮节圆直径。
蓝色盘上的孔的数量等于其齿数。
可以用齿轮齿条传动代替电缆,可避免电缆滑动。
5.成型机上切削齿轮2(Cutting gear on the shaper 2)

这种方法仅用于齿轮小模块m和小齿数z。
工具是齿条形状。
不需要转位。
携带工件的桌子的总位移必须大于╥*m*z。
6.便携式镗床1(Portable boring machine 1)
行星齿轮传动和螺母螺钉传动的结合。
携带螺母螺钉的蓝色轴为输入。
红色工具固定在粉色螺母滑块上,有小螺距的螺旋运动。
此机制用于比较困难在车床或镗床加工的大工件(玻璃)。
7.砂轮平衡1(Grinding wheel equilibration 1)
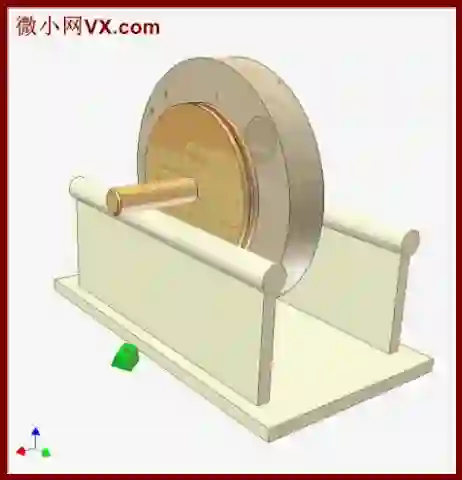
砂轮组件在两平行轴间。
如果组件静态不平衡,重力使得其质量中心在装配轴下。
移动绿色砝码到组件的燕尾槽内,将它们固定来获得平衡,然后再次测试组件。
8.砂轮平衡2(Grinding wheel equilibration 2)
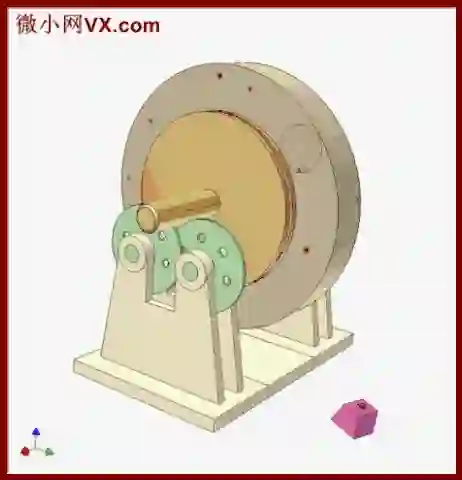
砂轮组件在四个自由辊柱间。
如果组件静态不平衡,重力使得其质量中心在装配轴下。
移动粉色砝码到组件的燕尾槽内,将它们固定来获得平衡,然后再次测试组件。
四个辊柱的作用是能将组件旋转产生的摩擦降到最低。
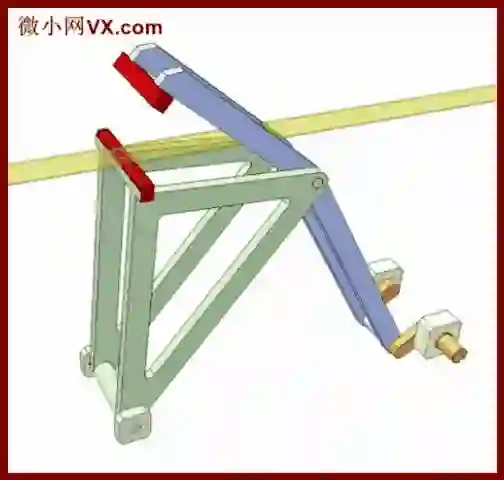
9.连接板切断机制1(Web-cutting mechanism 1)

有扩展耦合器的四连杆可以高速切断黄色连接板。
此连杆的作用是在切断运动中给刀一个大小与连接板速度相等的速度。
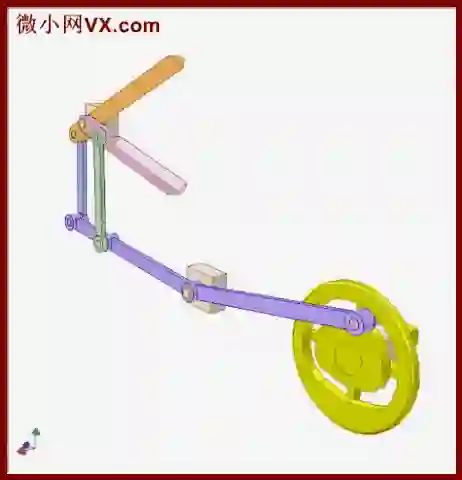
10.连接板切断机制2(Web-cutting mechanism 2)
耦合器上带刀的平行四边形机制可以高速切断黄色连接板。
此机制的作用是在切断运动中给刀一个和连接板速度相等的速度。
绿色杆的作用是协助机制克服死角。
11.切片机(Mechanism for slicing machine)

12.凸轮驱动剪1(Cam-driven scissors 1)
13.落锤(Drop hammer)
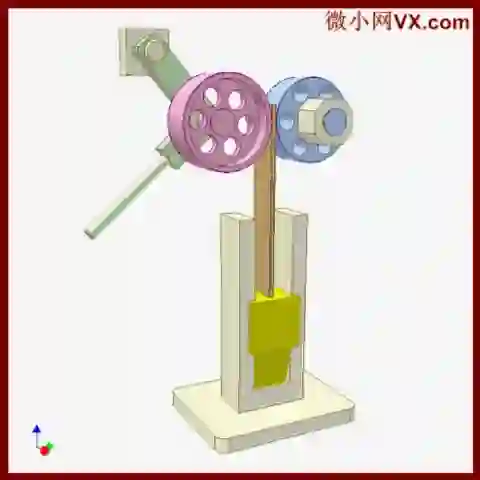
输入:绿色皮带轮轴
绿色轴和红色空心轴间有一个滑键。
黄色滑块的上下运动取决绿色杆。
14.摩擦压力机1(Friction press 1)
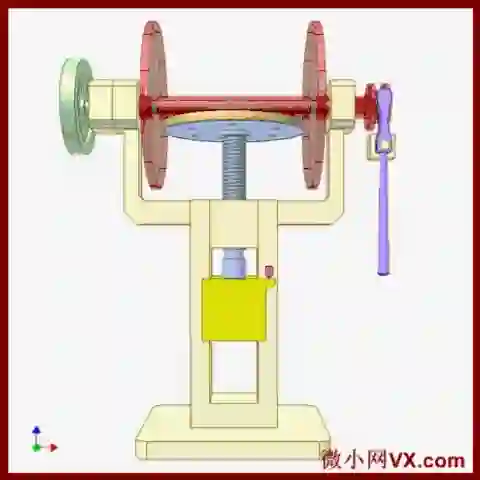
输入:绿色皮带轮轴
绿色轴和红色空心轴之间有一个滑键。
蓝色盘-螺钉交替性地与两个红色盘接触。
黄色滑块的上下运动由紫色杆控制。
滑块在行程的最低位置达到最大速度,最高位置达到最大速度。
粉色制停器决定滑块的最高位置。
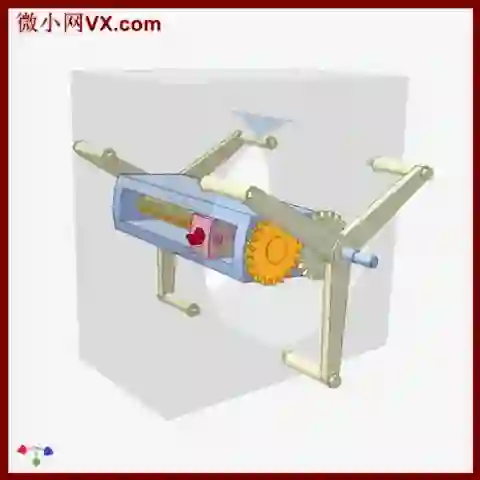
15.摩擦压力机2(Friction press 2)

输入:中心小齿轮
紫色盘携带四个齿轮和两个辊柱。
辊柱交替性地与黄色盘接触,并且给螺钉往复运动。
对映蓝色螺母-滑块机制的上,下,驻留运动,杆有三个不同位置。
有一个制停器在盘驻留时保持其静止,未显示。
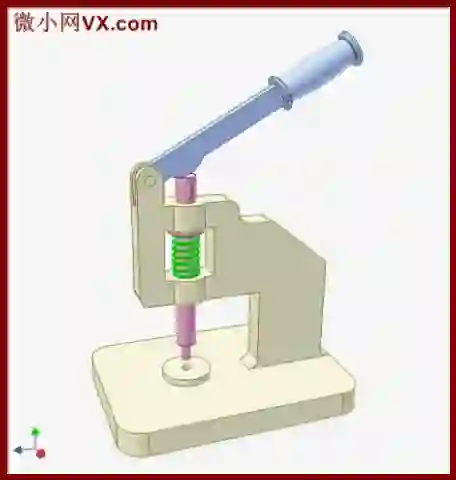
16.手动冲床1(Hand punch machine 1)

齿轮传动和滑块-曲柄机制的结合。
17.手动冲床2(Hand punch machine 2)
盘形凸轮和线性往复运动从动件。
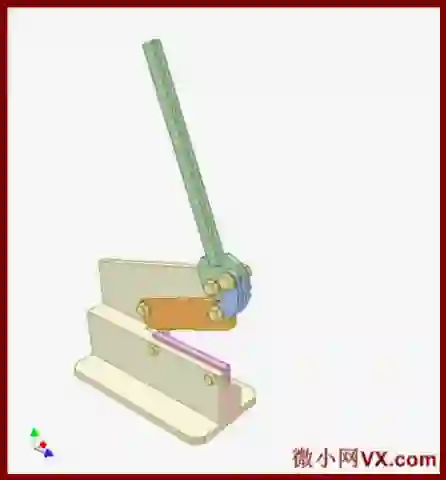
18.手动剪切机1(Hand shearing machine 1)
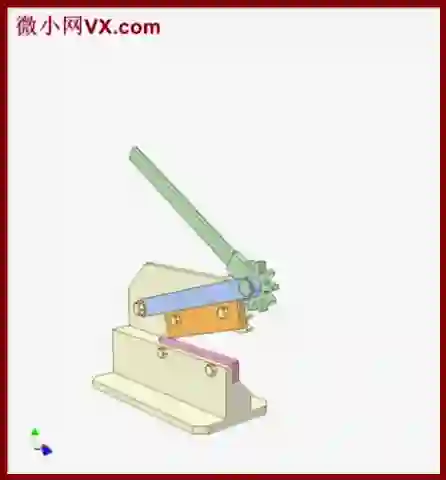
使用了一个行星齿轮。
手动力量施加在卫星齿轮上。
其它齿轮固定。
上方的工具台固定在载体上。
19.手动剪切机2(Hand shearing machine 2)
使用了一个四连杆机制。
手动力量施加在一个曲柄上。
上方的工具台固定在其它曲柄上。
20.脚踏剪切机1(Foot shearing machine 1)
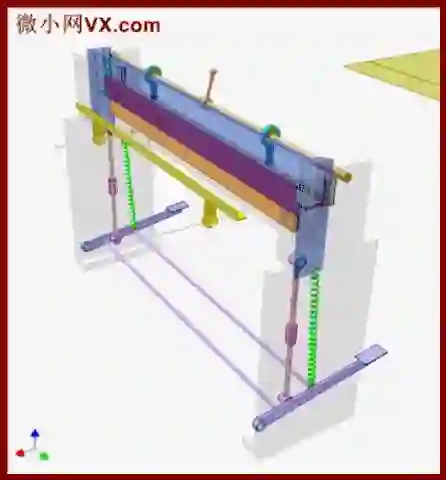
蓝色滑块由一个滑块曲柄机制驱动。
曲柄是紫色的脚踏杆。
橙色低剪切片固定在机制基座。
红色上剪切片有斜刃,可降低剪切力。
21.脚踏剪切机2(Foot shearing machine 2)

蓝色滑块由一个六杆机制驱动。
绿色滑块的运动轨道在蓝色滑块上。
橙色低剪切片固定在机制基座。
红色上剪切片有斜刃,可降低剪切力。
22.台木锯1(Table wood saw 1)
橙色圆刀片的位置调整运动:
使用粉色螺母进行上下运动。马达由粉色销调整。
使用橙色螺母进行倾斜运动。
23.台木锯2(Table wood saw 2)

橙色圆刀片的位置调整运动:
使用粉色螺母进行上下运动。马达和刀片轴由粉色销调整。
使用粉色螺母进行倾斜运动。
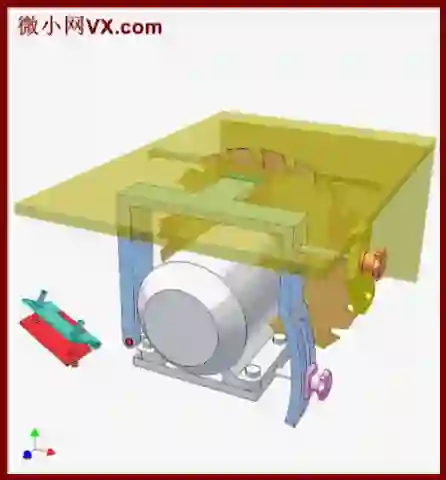
24.翻转机制1(Flipping mechanism 1)
此机制可以通过两个4杆机制翻转一个平面板。
两个翻转板其实是两个4杆的第四根杆的延伸。
25.翻转机制2(Flipping mechanism 2)

连杆长度:50
两个曲柄长度:120和140
两个固定轴承距离:50
工件180°旋转对应蓝色曲柄旋转90°。
26.传送机制1(Transport mechanism 1)

蓝色关节的鸡蛋型运动的作用是移动红色工件。
是粉色杆4杆机制上的一点的轨迹。
黄色杆和橙色杆连接形成一个平行四边形机制。
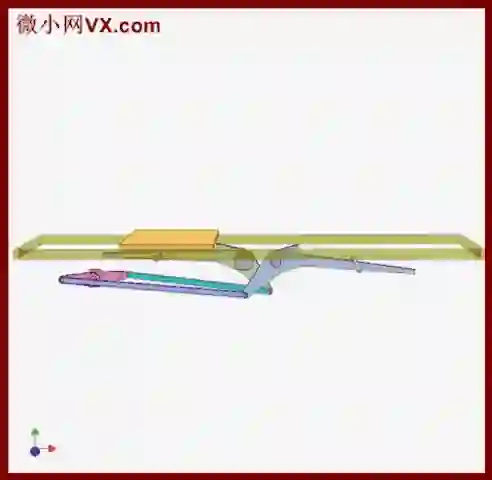
27.并联给料机1(Parallel-link feeder 1)
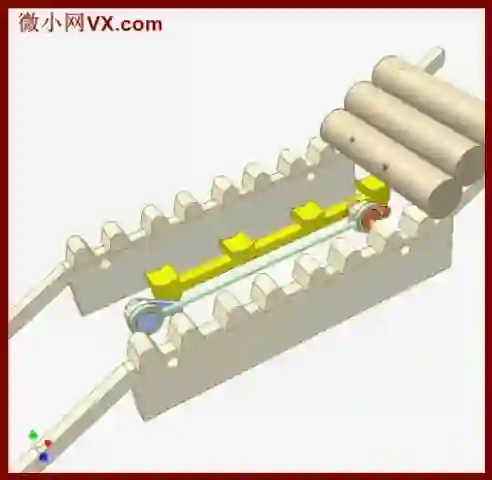
平行四边形机制的作用是传送工件。
绿色杆协助机制克服死角。
28.并联给料机2(Parallel-link feeder 2)
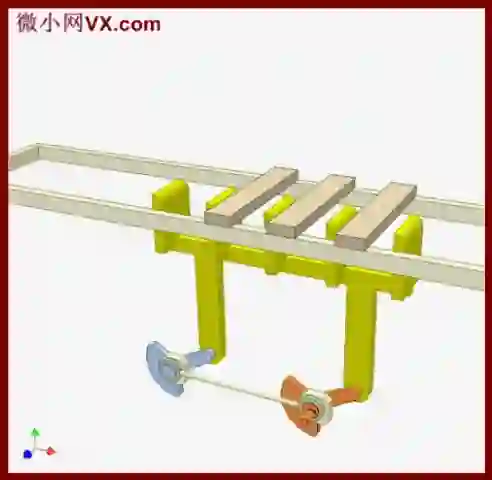
平行四边形机制的作用是传送工件。
绿色杆协助机制克服死角。
红色圈是黄色传送机上一点的轨迹。
29.可移动弹簧进料管(Movable spring feed-duct)

作为球或短辊柱的进料管。
30.零件定位(Part orientation)

黄色盘的凹槽是关键。
31.推进带机制(Mechanism for advancing a strip)

输入:低绿色轴
辊柱通过在蓝色轨道上的一个方形孔和橙色带连接。
其上固定一个齿轮和一个不完整辊柱的上绿色轴可以在黄色基座上的垂直槽中滑动。
带和辊柱间的摩擦力由红色弹簧产生。
上辊柱的不完整轮廓推进带。
32.带进相机(Band advancer)

输入:携带两个齿轮的蓝色轴
黑色皮带间的摩擦力使得棕色带前进。
皮带预紧器包括两个橙色辊柱和一个在末端有左螺旋和右螺旋的粉色螺钉。
END
加入社群
机器人大讲堂Rob社群开始招募啦!如果您正在从事或想要从事机器人行业、想要学习这一方向,都欢迎您加入我们共同探讨机器人前沿科技。
另外,腿足机器人、医疗机器人、工业机器人专业讨论群正在招募中,欢迎各位专业领域的小伙伴加入。
在机器人大讲堂公众号对话框回复“交流群”获取入群方式!
招募作者
机器人大讲堂正在招募兼职内容创作者和专栏作家
请将简历和原创作品投至邮箱:LDjqrdjt@163.com
我们对职业、所在地等没有要求,欢迎有兴趣有能力的朋友加入!

看累了吗?戳一下“在看”支持我们吧!


