【700页书稿】《决策算法》2022年MIT
引言
1.1 决策
-
结果的不确定性,即我们的行动效果是不确定的。 -
模型的不确定性,即我们对问题的模型是不确定的。 -
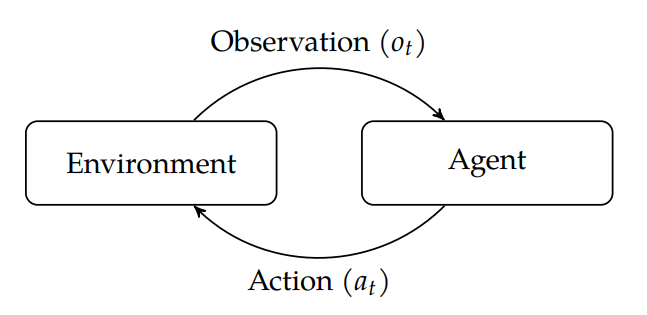
状态的不确定性,即环境的真实状态是不确定的。 -
相互作用的不确定性,即在环境中相互作用的其他智能体的行为是不确定的。
1.2 应用
1.2.1 飞机避撞
1.2.2 自动驾驶
1.2.3 乳腺癌筛查
1.2.4 金融消费与投资组合配置
1.2.5 分布式野火监测
1.2.6 火星科学探索
1.3 方法
1.3.1 显式编程
1.3.2 监督学习
1.3.3 优化
1.3.4 规划
1.3.5 强化学习
1.4 历史发展
1.5 社会意义
1.6 本书概述
1.6.1 概率推理
1.6.2 序列问题
1.6.3 模型不确定性
1.6.4 状态不确定性
1.6.5 多智能体系统
便捷下载,请关注专知人工智能公众号(点击上方关注)
点击“发消息” 回复 “DMA700” 就可以获取《【700页书稿】《决策算法》2022年MIT》专知下载链接



登录查看更多
相关内容
Arxiv
0+阅读 · 2023年1月24日
Arxiv
0+阅读 · 2023年1月22日
Arxiv
0+阅读 · 2023年1月22日
Arxiv
0+阅读 · 2023年1月20日


相关VIP内容
相关资讯