室内定位深度剖析,无人机最缺它!

关键词 : 基于位置服务,室内定位,定位技术
引言
室内导航与定位关乎国家安全,是全球大国竞争的核心利益。无人机最缺它!一旦无人机像人一样室内活动自如,将开启一个比现有规模还大的室内市场,对于室外环境,全球导航卫星系统(Global Navigation Satellite System, GNSS)诸如美国的全球定位系统(Global Positioning System, GPS)、我国的北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)能够为用户提供较高精度的定位服务,基本满足了用户在室外场景中对基于位置服务的需求。然而,个人用户、服务机器人、扫地机器人等有大量的定位需求发生在室内场景。而室内场景受到建筑物的遮挡,GNSS信号快速衰减,甚至完全拒止,无法满足室内场景中导航定位的需要。因此,室内定位技术成为工业界与学术界研究的热点。
相比于美国军方于1964年正式投入使用的子午仪卫星定位系统(Transit)[1]以及后来以此为前身于1994年全面建成的GPS[2],室内定位技术起步较晚,美国联邦通信委员会(Federal Communications Commission, FCC)在1996年制定了初衷用于应急救援的E-911定位标准[3],之后在各行业应用需求的推动下,室内定位技术得到了快速的发展。目前,国内外研究已提出了射频识别技术(Radio Frequency Identification, RFID)、蓝牙、WLAN(Wireless Local Area Networks)、超宽带(Ultra-Wideband, UWB)等室内定位技术及系统,其中部分定位技术已经商用。但是,由于室内场景的复杂性和多样性,不同的室内定位技术也具有不同的缺点和局限性,尚未形成与GNSS类似的普适解决方案。
本文首先对目前主要的室内定位技术的原理进行简要介绍,然后对室内定位技术的分类进行阐述,并针对目前主流的室内定位技术进行详细介绍。最后介绍室内定位技术的应用场景和发展前景。
室内定位技术
室内定位是指在室内环境中实现位置定位,主要采用无线通信、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控。
随着通信技术和电子制造工艺的不断发展和普及,室内定位技术层出不穷,定位精度从几米到几十米都有,并在一些行业中得到了应用。
PART
01 室内定位方法
目前室内定位常用的定位方法,从原理上主要分为七种:邻近探测法、质心定位法、多边定位法、三角定位法、极点法、指纹定位法和航位推算法[4]。
ProximityDetection(邻近探测法)
邻近探测法,又称为CoO(Cell of Origin)法或Cell-ID(Cell Identification)法,通过一些有范围限制的物理信号的接收,从而判断移动设备是否出现在某一个发射点附近。该方法的定位精度取决于发射点的布设密度和信号覆盖范围。该方法虽然只能提供大概的定位信息,但其布设成本低、易于搭建,适合于一些对定位精度要求不高的应用,例如自动识别系统用于公司的员工签到。
Centroid Determination(质心定位法)
质心定位法是根据移动设备可接收信号范围内所有已知的信标(beacon)位置,计算其质心坐标作为移动设备的坐标。相应地,也可以根据接收信号强度指示(Received Signal Strength Indication, RSSI)设置对应的信标的权重,得到加权质心作为移动设备的坐标。该方法算法易于理解,计算量小,定位精度取决于信标的布设密度。
Multilateration(多边定位法)
该方法是通过测量待测目标到已知参考点之间的距离,从而确定待测目标的位置。基于多边定位的定位系统可以采用多种距离估计方法,比较常见的距离估计法有基于信号到达时间(Time Of Arrival, TOA),基于信号到达时间差(Time Difference Of Arrival, TDOA),基于增强观测时间差(Enhanced Observed Time Difference, E-OTD),基于往返时间(Round Trip Time, RTT),基于接收信号强度指示[5][6]。
Triangulation(多边定位法)
三角定位法,也可称为到达角测量法(Arrival Of Angle, AOA)。该方法是在获取待测目标相对两个已知参考点的角度后结合两参考点间的距离信息可以确定唯一的三角形,即可确定待测目标的位置。到达角信息,亦即信号到达的角度,可以通过定向天线获取。同时基于摄像头的定位系统也可实现基于AOA的定位[7]。
Polar Point Method(极点法)
极点法通过测量相对某一已知参考点的距离和角度从而确定待测点的位置。该方法仅需已知一个参考点的位置坐标,因此使用非常方便,已经在大地测量中得到广泛应用,多个待测目标的位置可以仅从一个全站仪的简单建立得到。
Fingerprinting(指纹定位法)
指纹定位采集的标准量是射频信号,但指纹定位法也可采用声音信号、光信号或其他无线信号实现。指纹定位通常包括两个阶段:第一阶段,离线校准阶段,通过实际采集或计算分析建立指纹地图。具体地,选择室内场景中的多个位置点采集多个基站发出的信号的强度并加入到指纹数据库中。第二阶段,定位阶段,通过将实际实时接收到的信号于指纹数据库中的信号特征参数进行对比找到最好的匹配参数,其对应的位置坐标即认为是待测目标的位置坐标。指纹定位的优势是几乎不需要参考测量点,定位精度相对较高,但缺点是前期离线建立指纹库的工作量巨大,同时很难自适应于环境变化较大的场景。
Dead Reckoning(航位推算法)
指纹定位采集的标准量是射频信号,但指纹定位法也可采用声音信号、光信号或其他无线信号实现。指纹定位通常包括两个阶段:第一阶段,离线校准阶段,通过实际采集或计算分析建立指纹地图。具体地,选择室内场景中的多个位置点采集多个基站发出的信号的强度并加入到指纹数据库中。第二阶段,定位阶段,通过将实际实时接收到的信号于指纹数据库中的信号特征参数进行对比找到最好的匹配参数,其对应的位置坐标即认为是待测目标的位置坐标。指纹定位的优势是几乎不需要参考测量点,定位精度相对较高,但缺点是前期离线建立指纹库的工作量巨大,同时很难自适应于环境变化较大的场景。
PART
02 室内定位观测量
不同的室内定位方法选择不同的观测量,通过不同的观测量提取算法所需要的信息。下面对主要的观测量进行简要的介绍。
RSSI测量
RSSI测量是通过计算信号的传播损耗,可以使用理论或者经验模型来将传播损耗转化为距离,也可以用于指纹定位建立指纹库。
在自由空间中,距发射机d处的天线接收到的信号强度可由下式给出[4]:
其中,PT表示发射功率;PR表示距离d处的接收功率;GT表示发射天线的增益; GR表示接收天线的增益;λ表示信号波长;L表示系统的损失(L>1) 。
TOA测量
TOA方法主要测量信号在基站和移动台之间的单程传播时间或来回传播时间。前者要求基站与移动台间的时钟同步。
TOA测量的定位方法为多边定位。若电磁波从移动台到基站的传播时间为t,电磁波的传播速度为c,则移动台位于以该基站为圆心,c×t为半径的圆上。同理在第二个、第三个基站的圆上,故移动台的位置坐标应为这三个圆的交点。如图1所示,A、B、C为三个已知位置的基站,P为移动台,R1、R2、R3分别为移动台到基站A、B、C的距离。

图1. 基于TOA的定位原理[9]
TDOA测量
该方法同样是测量信号到达时间,但使用到达时间差进行定位计算,可利用双曲线交点确定移动台位置,故可以避免对基站和移动台的精确同步。
通过TDOA测量,可以得到未知移动台到两个基站的距离之差,即移动台位于以两个基站为焦点的双曲线上。引入第三个基站,可以得到两个以上双曲线方程,则双曲线的交点即为移动台的位置。如图2所示,A、B、C为三个已知位置的基站,P为移动台,R1、R2、R3分别为移动台到基站A、B、C的距离,其中R2-R1、R3-R1为定值。
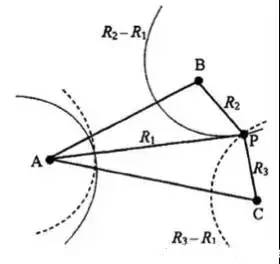
图2. 基于TDOA的定位原理[9]
AOA测量
AOA方法是指接收机通过天线阵列测出电磁波的入射角度,包括测量基站信号到移动台的角度或者移动台信号到达基站的角度。每种方式均会产生从基站到移动台的方向线。两个基站可以得到两条方向线,其交点即为移动台位置。因此,AOA方法只需要两个基站即可确定移动台位置。如图3所示,θ1为移动台P的信号到达基站A的角度,θ2为信号到达基站B的角度。
AOA需要准确测量电磁波的入射角,对天线的要求非常高,如果每个基站均安装天线阵列,将导致设备复杂度变高。而在室内环境中多径效应和环境变化均会严重影响方向判断,干扰定位结果。
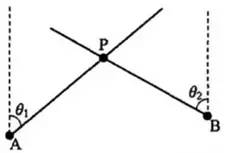
图3. 基于AOA的定位原理[9]
方向和距离
获取方向和距离多用于航位推算定位,采用自包含传感器记录载体的物理信息,计算得到方向和距离,从而在已知上一位置的基础上计算得到当前的未知。
PART
03 室内定位分类
室内定位技术的分类对于室内定位结构体系的构建具有重要的价值。
华盛顿大学的J. Hightower和G. Borriello在2001年就提出了以定位位置类型、绝对/相对定位、主动/被动定位、精度、覆盖范围、所用信号等方面对定位技术进行分类,以方便研究人员和开发者更好地评估一个定位系统[10]。清华大学的刘长征等人在2003年根据测量和计算的实体将定位技术分为基于网络的定位技术和基于移动终端的定位技术[11]。北京理工大学的房秉毅在2006年根据应用精度将室内定位技术大致分为“目标发现”类和“智能空间”类[12]。李泳按照通信手段和测量所采用的技术对室内定位系统进行了分类[13]。
2009年,梁元诚提出了三种室内定位技术的分类方法:基于位置感知技术,分为基于临近关系、基于三角关系和基于场景分析的定位技术;基于信号测量技术,分为基于RSSI测量、基于TOA测量、基于TDOA测量、基于AOA测量、基于Cell-ID以及基于BER(Bit Error Rate)测量的定位;基于传感器类型,可以分为基于RFID、红外线、超声波系统、蓝牙、超宽带系统、Zigbee、WLAN、GSM和GPS等[14]。
同年,F. Seco根据室内定位中定位算法,将定位技术分为四类:基于几何的方法、基于成本最小化的方法、指纹定位和贝叶斯技术[15]。
2013年,北京邮电大学的邓中亮提出按照定位原理可以分为识别(Identity)、几何法和指纹定位;按照传输信号不同分为Wi-Fi、Zigbee、RFID、蓝牙、超宽带、伪卫星、蜂窝网络和激光等[16]。
同时,按照定位范围分为广域室内定位和居于室内定位[17]。其他常见的定位分类标准还有:基于距离和距离无关的定位技术、递增式和并发式的定位技术、基于信标节点和无信标节点的定位技术以及集中式定位与分布式定位技术等[13]。
PART
04 主流的室内定位技术
根据前面介绍的定位方法,衍生出了多种室内定位技术,下面将对主流的室内定位技术进行简要介绍。
视觉定位
视觉定位系统可以分为两类,一类是通过移动的传感器(如摄像头)采集图像确定该传感器的位置,另一类是固定位置的传感器确定图像中待测目标的位置。根据参考点选择不同又可以分为参考三维建筑模型、图像、预部署目标、投影目标、他传感器和无参考[18]。参考3D建筑模型和图像分别是以已有建筑结构数据库和预先标定图像进行比对。而为提高鲁棒性,参考预部署目标使用布置好的特定图像标志(如二维码)作为参考点;投影目标则是在参考预部署目标的基础上在室内环境投影参考点。参考其他传感器则可以融合其他传感器数据以提高精度、覆盖范围或鲁棒性。
Hile和Borriello使用照相手机比对图像和楼层平面图,达到了30cm的定位精度[19]。Sjö使用一个低分辨率相机基于参考图像实现SLAM(Simultaneous Localization And Mapping)算法,达到了亚米级的定位精度[20]。Mulloni使用条形码作为参考点标记,实现了厘米到分米级的定位精度[21]。Tilch和Mautz使用一个移动相机和激光仪作投影,定位精度可达到亚毫米级[22]。LiuT.使用一个6自由度惯性测量单元(Inertial Measurement Unit, IMU)和两个激光扫描器获取位置,平均定位精度达到行走距离的1%[23]。
红外线定位
红外线是一种波长在无线电波和可见光波之间的电磁波。基于红外线的定位系统可以主要分为两类:有源信标、红外成像[4]。
有源信标是在室内放置若干红外接收机,同时待测物携带一个装有红外发射机的电子标签。该标签周期发送该待测物的ID,接收机接收到信号后将数据发送到数据库进行定位。该方法具有代表性的是AT&T实验室和剑桥在1992年联合发布的Active Badge系统。该系统可以达到6米的平均定位精度[24]。
红外成像则是通过传感器采集环境中自然红外辐射生成图像实现检测行人或其他待测目标。2011年德国Ambiplex提供基于自然环境热辐射的“IR.Loc”定位系统,基于AOA确定热源的位置,可实现10m范围内20cm至30cm的定位精度[25]。
Polar Systems(极点定位)
该系统通过仪器测量到达角或者到达时间进行定位,仪器通常有激光跟踪仪、全站仪和经纬仪。全站仪的可覆盖范围通常为2km到10km,但其设备高成本、大体积以及对可视距的要求使其不适用于在室内定位中推广。NikonMetrology 2011年发布的iGPS(indoor Global Positioning System)实现了基于激光的室内工业级高精度三维定位。其原理与GPS不同,包括不少于两个固定位置的发射器发射扇形激光束和参考红外脉冲,基于TDOA原理实现对接收机的定位。NikonMetrology宣称该系统可实现在布设4至8个发射器的1200平方米的典型测试环境中实现0.2mm的三维定位精度[26]。但其造价十分昂贵,可用于工业级定位需求,不适合于大众市场研究和推广。
超声波定位
超声波定位主要采用反射式测距法,通过多边定位等方法确定物体位置,系统由一个主测距器和若干接收器组成,主测距仪可放置在待测目标上,接收器固定于室内环境中。定位时,向接收器发射同频率的信号,接收器接收后又反射传输给主测距器,根据回波和发射波的时间差计算出距离,从而确定位置[27]。
Ward于1997年建立的ActiveBat是超声定位的先驱,通过大量部署接收设备(720个标签),达到3cm的定位精度[28]。超声波定位整体定位精度较高,结构简单,但超声波受多径效应和非视距传播影响很大,且超声波频率受多普勒效应和温度影响,同时也需要大量基础硬件设施,成本较高。
WLAN定位
基于IEEE802.11b标准的无线局域网已在人们的生活场所大量部署,使用WLAN信号定位的优势在于不需要部署额外设备,定位成本低,信号覆盖范围大,适用性强,利于普及推广[9]。
基于RSSI的指纹定位法是目前主流的WLAN定位方法[29],定位精度取决于校准点的密度,从2m到10m不等。同时基于TOA测距的定位方法由于多径效应和时钟分辨率低定位效果较差[30],而基于RSSI测距的定位方法由于信号衰减与距离的关系在不同环境和设备条件下都有改变,定位结果也不理想。
RFID定位
射频识别(RFID)是一种操控简易,适用于自动控制领域的技术,它利用电感和电磁耦合的传输特性,实现对被识别物体的自动识别。RFID定位系统通常由电子标签、射频读写器以及计算机数据库构组成。最常应用的定位方法是邻近检测法。利用RSSI实现多边定位算法也可一定程度上实现范围估计。根据电子标签是否有源可以分为有源RFID和无源RFID。
1)有源RFID
有源RFID的电子标签包含电池,因此信号传输范围相比于无源RFID更大,达到30米以上。同时可以实现基于RSSI测量的指纹定位[31]。Seco使用高斯过程描述RSSI在室内的传播结合指纹定位的方法,在1600平方米的实验环境中采用71个RFID标签实现50%定位误差1.5m[32]。
2)无源RFID
无源RFID系统只依赖电感耦合,因此没有电池。相比有源RFID,体积更小,耐用性更高,成本更低。无源RFID定位系统多使用邻近探测法实现定位。
超宽带定位
超宽带定位系统通常包括UWB接收器、参考标签和其他标签。超宽带技术通过发送纳秒级及其以下的超窄脉冲来传输数据,可以获得GHz级的数据带宽,发射功率较低,无载波[33]。因为其高带宽,理论上基于TOA或TDOA方法实现厘米级的定位。Ubisense是发布于2011年采用TDOA和AOA的室内定位系统,定位精度可达15cm,测距范围达到50m[34]。但UWB系统较高的系统建设成本阻碍了其普及推广。
惯性导航
惯性导航系统(Inertial Navigation System, INS)广泛应用于制导武器、舰艇、火箭、飞机和车辆等的导航与跟踪,其核心组件IMU,由三个正交的单轴加速度计和三个正交的陀螺仪组成。随着微机电技术的发展,传感器尺寸变小,成本降低,同时加入磁力计,被广泛应用于行人导航[35]。
惯性导航基于航位推算方法实现,因此随着时间会产生累积误差,其定位精度取决于传感器质量和传感器安放位置[36]。绑在脚上的惯性导航可采用零速校正限制漂移实现定位误差小于行走距离的1%,而安放在其他位置则定位误差常常大于1%。随着智能手机的普及和微机电器件的发展,基于智能手机的惯性导航成为研究热点[37][38][39][40]。
地磁定位
现代建筑物基本都具有钢筋混凝土结构,这些建筑物墙体内部的金属结构会对室内的地磁场产生很大影响,而室内的电气设备也会对磁场产生影响。同时室内磁场具有较强的稳定性[41]。故室内地磁场是一种可运用于室内定位导航的有效信息源。地磁定位,是指利用地磁场特征的特异性获取位置信息的技术方案[42]。定位方法主要采用指纹定位的方法。由于原有磁场信息,故成本相比其他定位技术更低,但仍需要人工建立数据库。IndoorAtlas的地磁定位方案是其中代表,定位精度已能达到1~2米[43]。
伪卫星
卫星是一种基于地面的能传播类似GNSS信号的发生器,最简单的组成是GNSS信号发生器和发射装置[44]。采用与GNSS信号体制不同的伪卫星,可避免对正常卫星信号的干扰,可达到厘米级定位精度,但设备复杂,成本很高。Locata在2010年发布的系统可实现50平方千米内2厘米的定位精度[45]。
蓝牙和ZigBee定位
蓝牙和ZigBee技术类似,有部分重合频段,且两者定位技术均基于短距离低功耗通信协议:ZigBee是基于IEEE802.15.4标准的低功耗局域网协议;目前蓝牙定位主要使用蓝牙4.0规范,是基于低功耗蓝牙技术(Bluetooth Low Energy, BLE)。两者都具有近距离、低功耗、低成本的特点[46][47]。ZigBee(蓝牙)的定位均通过在室内环境中布置静态参考点(蓝牙beacon),可以实现基于邻近探测法、质心法[48]、多边定位和指纹定位的定位系统[49][50]。定位精度主要取决于基础设施的部署密度。2016年发布的蓝牙5.0协议支持BLE Direction Finding的 Angle of Arrival(AoA)和Angle of Departure(AoD)参数估计,这些参数将为1m以内的室内定位提供技术支撑
蜂窝网络定位
蜂窝网络技术是一种成熟的通信技术,主要用于对移动手机的定位。蜂窝网络通过检测移动台和多个基站之间传播信号的特征参数(RSSI,传播时间或时间差,入射角等)[51],可采用邻近探测法、AOA、TOA和OTDOA (Observed Time Difference Of Arrival, 观测到达时间差)[52]实现定位,可作为普适化的定位方案。目前Cell-ID加上RTT解决方案精度为20-60m。采用智能天线MIMO+TDOA/AOA技术,精度可以达到5-10m。未来的5G网络具有大带宽、多天线、密集组网等优势,可以实现1m以内的定位精度。
融合定位
融合定位是指融合多种定位技术、多传感器的信息进行综合定位,以达到优势互补,提高定位精度、鲁棒性,降低定位成本。定位技术的选择则主要视场景需求而定,多为绝对定位技术与相对定位技术的结合,如浙江大学郭伟龙实现了地磁与惯导结合的室内定位系统[41],平稳步行时90%定位误差小于4.5m;上海交通大学钱久超将惯导定位与地图结合实现手机端的室内定位,正常持握手机姿态下95%误差为0.8m[36];同时也有很多研究将WiFi与惯导结合[53][54]取得了较好的效果。针对行人复杂的运动行为,[55][56]提出了运动识别辅助的行人定位方法,提高了室内定位的鲁棒性。
协同定位
协同定位是指在一个定位场景中存在已知节点和未知节点,未知节点之间可以进行信息交互,也可以相互之间进行测距、测向或邻近探测,并且可以利用过去时刻的定位信息,从而实现对未知节点当前时刻的定位。协同定位的具体方式可根据具体定位技术调整,目标在于通过节点之间的协同合作提升单个节点及整个系统的定位性能[57]。协同定位在多机器人定位、无线网络定位、水下自主航行器及卫星定位等研究中正受到越来越多的关注。文献[58]对无线传感网络关于协同定位的研究进行了综述。意大利都灵理工大学的R. Garello团队进行了协同定位对卫星定位终端辅助捕获的研究,并比较了几种常见的定位算法的性能[59]。文献[60]对水下自主航行器的协同定位进行了综述。
Crowdsensing(群智感知)
群智感知是将普通用户的移动设备作为基本感知单元,通过网络通讯形成群智感知网络,从而实现感知任务分发与感知数据收集,完成大规模、复杂的社会感知任务。在计算机科学领域,与群智感知相关的概念有:群体计算(Crowd computing)、社群感知(Social sensing)、众包(Crowdsourcing)等等。在室内定位领域,群智感知也得到广泛的研究和应用。文献[61]分析了利用Crowd Sensing进行机会信号获取,并应用于室内定位方法。清华大学的吴陈沭利用移动群智感知机制,提出了无人工现场勘测的无线信号指纹地图构建技术[62]。上海交通大学的张敏将用户的运动信息与无线信号结合,通过无线虚拟地标和GraphSLAM图优化方法,利用群智感知建立无线定位指纹库[63]。上海交通大学的高文政同样基于群智感知,提出了指纹信号的衰减生命周期描述方法,实现了对无线定位网络指纹库的自适应更新[64]。
PART
05 室内定位技术对比分析

室内定位技术的应用
室内定位技术作为定位技术在室内环境中的延续,弥补了传统定位技术的不足,目前已经在特定的行业内投入实际应用,并取得了一定的应用成果,有着良好的应用前景。
PART
00 室内无人机
人的一生至少有三分之一在室内度过,受限于室内位置服务的技术瓶颈,无人机这个智能机器人却无法陪伴人类,一旦无人机像人一样室内活动自如,将开启一个比现有规模还大的室内市场,人做不到的事它都胜任的很好,比如你上班后它接替你成为管家。
PART
01 室内位置服务
室内位置服务在大型商超、机场、酒店、博物馆、会展中心等大型室内场景中得到了应用。在布局比较复杂的大型超市中,用户能够查找感兴趣商品的所在位置;在大型购物商场,用户也可以查找想要去的店铺和娱乐场所,同时商家也可以针对性地进行广告推送,提供个性化营销。在博物馆或会展中心,室内定位也可以方便地提供定位导航服务。
PART
02 公共安全
室内定位对应急救援、消防、安全执法等方面具有重要作用。当发生地震、火灾等紧急事件时,救援的必要条件是快速确定人员位置。特别是当建筑物由于紧急事件布局发生变化时,凭借经验很难快速定位人员位置。室内定位技术可以为救援提供强有力的技术支持,更好地保障救援人员和受困人员的安全,更快地开展有效救援。
PART
03 人员物品管理
室内定位可以为特殊人群如学生、病人、犯人等提供室内的定位监护服务。具体地,为学生父母提供学生的到校情况;为公司员工提供签到服务;为监狱提供犯人活动情况汇报;为幼儿园设立电子围栏提供实时监护。
同时,室内定位也可以为仓储提供物品的定位服务,方便物品的防盗、整理、运输,提供全程的位置记录。
PART
04 智能交通
室内定位技术结合传统定位技术可提供室内外无缝定位导航服务,可为车辆提供从道路到停车场的全程导航服务,同时也解决了大型复杂地下停车场的寻车难题。
PART
05 大数据分析
室内定位可以记录用户的活动轨迹,对这些数据进行大数据分析,将用户的位置与行为及其背后的兴趣偏好联系起来。因此,对室内定位数据进行挖掘和分析具有极大的商业价值和应用前景。例如对某商场的消费者活动进行分析,可以分析出消费者对某个店铺的光顾频率和停留时间,从而得出消费者的兴趣和偏好以及店铺热度,为商业分析提供有力帮助。
PART
06 社交网络
社交网络在人们的生活中扮演着重要的角色,位置是社交网络的核心,在占人们生活时间80%左右的室内环境下,真实准确的位置能把朋友与活动关联起来。
室内定位的难点及发展趋势
尽管室内定位技术的精度不断提高,但仍没有在各行各业中得到普及推广,主要存在以下难点:
环境复杂
室内环境布局复杂多变,障碍物很多,包括家具、房间和行人等。同时室内环境干扰源多,灯光、温度、声音等干扰源都会对定位造成一定影响。
未知环境定位困难
目前大部分室内定位技术都是基于对室内环境有先验了解,一些定位技术还需要提前布设基站,但实际应用中可能得不到环境信息,或者定位基站受干扰、被破坏,如地震、火灾现场。减少对环境的依赖性也是室内定位的一个难点。
定位精度与成本难以兼顾
目前的高精度室内定位技术均需要比较昂贵的额外辅助设备或前期大量的人工处理,这些都大大制约了技术的推广普及。低成本的定位技术则在定位精度上需要提高。在提供高精度定位的基础上降低成本也是室内定位的一个方向。
随着室内定位技术的不断发展,高精度、低成本、普适的室内定位技术是未来的目标。综合利用各种定位技术及信息的融合定位将是解决目前室内定位难点的可行方案。快速发展的计算机视觉、5G移动通信网络、NB-IOT物联网等技术将为室内定位技术提供更多的技术途径。未来,像室外GNSS一样大规模广泛应用的室内定位方案必然会出现,结合室外定位技术实现全空间无缝定位。
结束语
室内定位的需求已经体现在人们生活的方方面面,如何实现高精度低成本普适的室内定位已经是定位领域正在解决的问题。本文介绍了目前主要的室内定位方法、定位技术、应用场景和发展难点。可供参考。
参考文献
[1] 维基百科Transit(satellite)[DB/OL].(2016-02-17)https://en.wikipedia.org/wiki/Transit_(satellite)
[2] 维基百科 Global Positioning System[DB/OL].(2016-02-17)https://en.wikipedia.org/wiki/Global_Positioning_System
[3] Wang S S, Green M,Malkawa M. E-911 location standards and location commercial services[C] //merging Technologies Symposium: Broadband, Wireless Internet Access. IEEE Xplore, 2000:5 pp.
[4] Mautz R. Indoor positioning technologies[J]. 2012.
[5] Drane C R. Mobile location without network-based synchronization or how to do E-OTD without LMUs[J]. Proceedings of SPIE - The International Society for Optical Engineering, 2003, 5084:59-66.
[6] Dwiyasa F, Lim M H. A survey of problems and approaches in wireless-based indoor positioning[C]// International Conference on Indoor Positioning and Indoor Navigation. 2016:1-7.
[7] Kemppi P, Rautiainen T, Ranki V, et al. Hybrid positioning system combining angle-based localization, pedestrian dead reckoning and map filtering[C]// International Conference on Indoor Positioning and Indoor Navigation. IEEE, 2010:1-7.
[8] Qian J, Ma J, Xu L, et al. Investigating the use of MEMS based wrist-worn IMU for pedestrian navigation application[C]//Proceedings of the 26th International Technical Meeting of the ION Satellite Division, ION GNSS. 2013.
[9] 赵永翔. 基于无线局域网的室内定位系统研究[D]. 武汉大学, 2010.
[10] Hightower J, Borriello G. Location systems for ubiquitous computing[J]. Computer, 2001, 34(8):57-66.
[11] 刘长征, 李纬, 丁辰,等. 多种定位技术融合构建LBS体系[J]. 地理信息世界, 2003, 1(3):24-27.
[12] 房秉毅. 基于超宽带技术的室内定位系统[J]. 电子技术应用, 2006, 32(7):124-127.
[13] 李泳. 基于ZigBee技术的室内定位系统设计[D]. 上海师范大学, 2008.
[14] 梁元诚. 基于无线局域网的室内定位技术研究与实现[D]. 电子科技大学, 2009.
[15] Seco F, Jimenez A R, Prieto C, et al. A survey of mathematical methods for indoor localization[C]// IEEE International Symposium on Intelligent Signal Processing. IEEE, 2009:9-14.
[16] 邓中亮, 余彦培, 袁协,等. 室内定位现状与发展趋势研究[J]. 中国通信(英文版), 2013, 10(3):50-63.
[17] 刘祺, 朱秋月, 冯莎. 室内定位技术的研究综述[J]. 计算机时代, 2016(8):13-15.
[18] Mautz R, Tilch S. Survey of optical indoor positioning systems[C]// International Conference on Indoor Positioning and Indoor Navigation. 2011:1-7.
[19] Hile H, Borriello G. Positioning and orientation in indoor environments using camera phones[J]. IEEE Computer Graphics and Applications, 2008, 28(4).
[20] Kragic D. Object Search and Localization for an Indoor Mobile Robot.[J]. Journal of Computing & Information Technology, 2009, 17(1):67-80.
[21] Mulloni A, Wagner D, Barakonyi I, et al. Indoor Positioning and Navigation with Camera Phones[J]. IEEE Pervasive Computing, 2009, 8(2):22-31.
[22] Tilch S, Mautz R. Development of a new laser-based, optical indoor positioning system[J]. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences Commission, 2010, 1501: 575-580.
[23] Liu T, Carlberg M, Chen G, et al. Indoor localization and visualization using a human-operated backpack system[C]//Indoor Positioning and Indoor Navigation (IPIN), 2010 International Conference on. IEEE, 2010: 1-10.
[24] Want R. The active badge location system[J]. Acm Transactions on Information Systems, 2000, 10(1):91-102.
[25] Ambiplex[EB/OL].(2016-02-17) http://www.ambiplex.com/
[26] iGPS. Nikon Metrology[EB/OL]. (2016-02-17) http://www.nikonmetrology.com/en_EU/Products/Large-Volume-Applications/iGPS/iGPS/(key_features)
[27] 吴雨航, 吴才聪, 陈秀万,等. 几种室内无线定位技术简介[J]. 中国测绘报, 2008.
[28] Ward A, Jones A, Hopper A. A new location technique for the active office[J]. IEEE Personal communications, 1997, 4(5): 42-47.
[29] Yuan Y, Pei L, Xu C, et al. Efficient WiFi fingerprint training using semi-supervised learning[C]//Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), 2014. IEEE, 2014: 148-155.
[30] Reddy H, Girish Chandra M, Balamuralidhar P, et al. An Improved Time-of-Arrival Estimation for WLAN-Based Local Positioning[C]// International Conference on Communication Systems Software and Middleware, 2007. Comsware. IEEE Xplore, 2007:1-5.
[31] Gikas V, Dimitratos A, Perakis H, et al. Full-scale testing and performance evaluation of an active RFID system for positioning and personal mobility[C]// International Conference on Indoor Positioning and Indoor Navigation. 2016:1-8.
[32] Seco F, Plagemann C, Jimenez A R, et al. Improving RFID-based indoor positioning accuracy using Gaussian processes[C]// International Conference on Indoor Positioning and Indoor Navigation. IEEE Xplore, 2010:1-8.
[33] 阮陵, 张翎, 许越,等. 室内定位:分类、方法与应用综述[J]. 地理信息世界, 2015(2):8-14.
[34] Ubisense[EB/OL].(2016-02-17) https://ubisense.net/en
[35] 陈伟. 基于GPS和自包含传感器的行人室内外无缝定位算法研究[D]. 中国科学技术大学, 2010.
[36] Qian J, Pei L, Ma J, et al. Vector graph assisted pedestrian dead reckoning using an unconstrained smartphone[J]. Sensors, 2015, 15(3): 5032-5057.
[37] Qian J, Pei L, Ying R, et al. Continuous motion recognition for natural pedestrian dead reckoning using smartphone sensors[C]//Proceedings of the 27th International Technical Meeting of the ION Satellite Division, ION GNSS. 2014.
[38] Wang L, Dong Z, Pei L, et al. A robust context-based heading estimation algorithm for pedestrian using a smartphone[C]//Proceedings of the 28th international technical meeting of the satellite division of the institute of navigation (ION GNSS 2015). Tampa, FL USA, SEP. 2015: 14-18.
[39] Qian J, Pei L, Ying R, et al. Continuous motion recognition for natural pedestrian dead reckoning using smartphone sensors[C]//Proceedings of the 27th International Technical Meeting of the ION Satellite Division, ION GNSS. 2014.
[40] Liu D, Pei L, Qian J, et al. A novel heading estimation algorithm for pedestrian using a smartphone without attitude constraints[C]//Ubiquitous Positioning, Indoor Navigation and Location Based Services (UPINLBS), 2016 Fourth International Conference on. IEEE, 2016: 29-37.
[41] 郭伟龙. 融合多源信息的室内定位算法研究[D]. 浙江大学, 2016.
[42] Haverinen J, Kemppainen A. A geomagnetic field based positioning technique for underground mines[C]// IEEE International Symposium on Robotic and Sensors Environments. IEEE, 2011:7-12.
[43] IndoorAtlas[EB/OL].(2016-02-17) http://www.indooratlas.com/how-it-works/
[44] 黄声享,刘贤三, 刘文建,等. 伪卫星技术及其应用[J]. 测绘地理信息, 2006, 31(2):49-51.
[45] Locata[EB/OL].(2016-02-17) http://www.locata.com/
[46] 汪苑, 林锦国. 几种常用室内定位技术的探讨[J]. 中国仪器仪表, 2011(2):54-57.
[47] 刘明伟, 刘太君, 叶焱,等. 基于低功耗蓝牙技术的室内定位应用研究[J]. 无线通信技术, 2015, 24(3):19-23.
[48] Subedi S, Kwon G R, Shin S, et al. Beacon based indoor positioning system using weighted centroid localization approach[C]//Ubiquitous and Future Networks (ICUFN), 2016 Eighth International Conference on. IEEE, 2016: 1016-1019.
[49] Dahlgren E, Mahmood H. Evaluation of indoor positioning based on Bluetooth Smart technology[J]. Master's thesis, Chalmers, 2014.
[50] Pei L, Chen R, Liu J, et al. Using Inquiry-Based Bluetooth RSSI Probability Distributions for Indoor Positioning[J]. 2010, 9:122-130122.
[51] 邓平. 蜂窝网络移动台定位技术研究[D]. 西南交通大学, 2002.
[52] Wang C, Xu J. Enhanced OTDOA Technology in 3G Location Service[J]. Telecommunications Science, 2005.
[53] Chen G, Meng X, Wang Y, et al. Integrated WiFi/PDR/Smartphone Using an Unscented Kalman Filter Algorithm for 3D Indoor Localization[J]. Sensors, 2015, 15(9):24595-24614.
[54] Liu J, Chen R, Pei L, et al. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS[J]. Sensors, 2012, 12(12):17208-17233.
[55] Pei L, Liu J, Guinness R, et al. Using LS-SVM Based Motion Recognition for Smartphone Indoor Wireless Positioning[J]. Sensors, 2012, 12(12):6155-6175.
[56] Pei L, Guinness R, Chen R, et al. Human Behavior Cognition Using Smartphone Sensors[J]. Sensors, 2013, 13(2):1402-1424.
[57] 田世伟, 戴卫恒,李广侠,等. 协同定位研究综述[C]// 中国卫星导航学术年会. 2013.
[58] Patwari N, Ash J N, Kyperountas S, et al. Locating the nodes: cooperative localization in wireless sensor networks[J]. Signal Processing Magazine IEEE, 2005, 22(4):54-69.
[59] Garello R, Presti L L, Corazza G, et al. Peer-to-Peer Cooperative Positioning: Part I: GNSS Aided Acquisition[J]. Inside Gnss, 2012.
[60] 张立川, 许少峰, 刘明雍,等. 多无人水下航行器协同导航定位研究进展[J]. 高技术通讯, 2016, 26(5):475-482.
[61] Pei L, Zhang M, Zou D, et al. A Survey of Crowd Sensing Opportunistic Signals for Indoor Localization[J]. Mobile Information Systems, 2016, 2016(3):1-16.
[62] 吴陈沭. 基于群智感知的无线室内定位[D]. 清华大学, 2015.
[63] Zhang M, Pei L, Deng X. GraphSLAM-based Crowdsourcing framework for indoor Wi-Fi fingerprinting[C]// Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services. 2016:61-67.
[64] Gao W, Pei L, Xu C, et al. Crowdsensing-based organic fingerprint for Wi-Fi localization[C]// Fourth International Conference on Ubiquitous Positioning, Indoor Navigation and Location Based Services. 2016:79-88.
来源:上海北斗导航创新研究院
长按识别图中二维码关注我们!






