【CV学习笔记】OpenCV基本操作
今天这一篇文章主要记录一下OpenCV中一些基本的操作,包括读取图片,视频以及反转图像的几种操作:

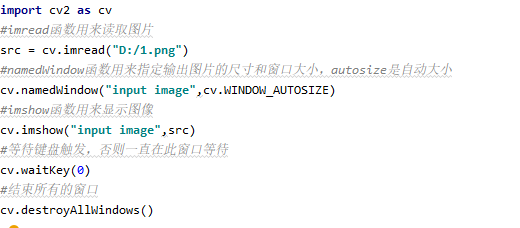
图片载入很常用,很实用。。。
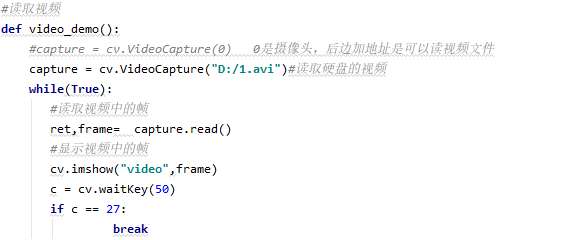
读取视频分为从摄像头中读入和从硬盘中读入,如果是摄像头就在videocapture函数中填写数值,0是默认的第一个摄像头,1.是第二个,以此类推,如果没有外置摄像头,就直接“”填写路径就行。
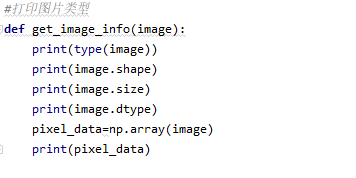
图片的信息主要包括图片的类型,图片的尺寸,图片的长宽高以及通道数,如果是彩色图片通道数就是3,如果是黑白的图片通道数为1。
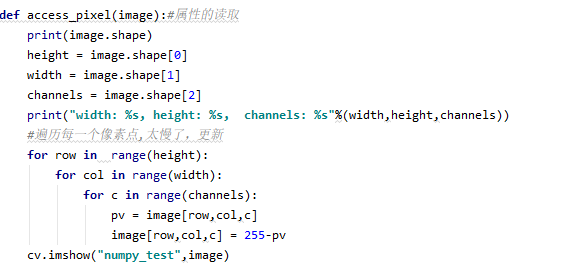
我这里定义了一个函数来输出图片的信息:
这里可以看到:
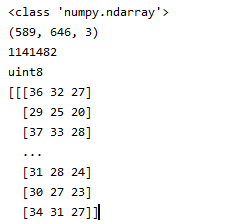
图片的大小是589*646的彩色3通道图片,编码方式是uint8.
我们知道图像的像素数是从0-255,如果实现图像的反转只需要遍历每个像素然后每个像素减去255即可,这里用一个笨方法实现以下:
得出的结果是这样:
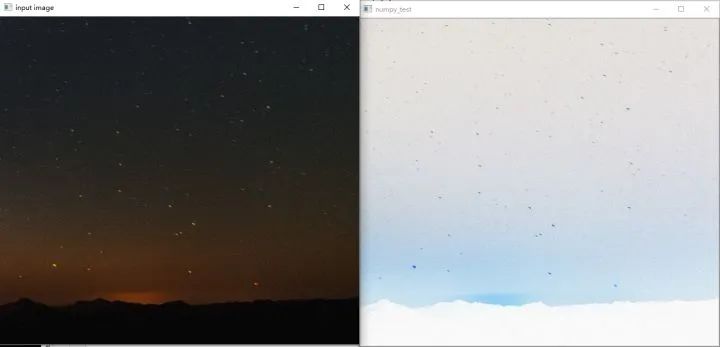
似乎转换了以后的图片还挺好看的。
当然,这样的方法太过于复杂,并且执行时间,效率都很低:
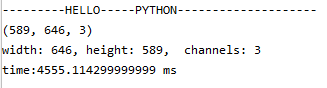
用时长达4555毫秒。。。
这时候我们使用OpenCV自带的bitwise_not函数:

因为底层是使用的C++语言进行封装,所以执行快得多,来对比下:

同样的一张图只需要17ms,舒服多了。
上图中的测试时间的计算用到了两个函数:
GetTickcount函数:它返回从操作系统启动到当前所经历的计时周期数
GetTickFrequency函数:返回每秒的计时周期数
使用的方法:
t1 = cv.getTickCount()
#你需要的测试的函数或代码
t2 = cv.getTickCount()
time = (t2-t1)/cv.getTickFrequency()
print("time:%s ms"%(time*1000))
最后,附上完整代码,方便大家复现,下一篇文章就要开始学习图像色彩空间的转换,还需努力。如果有任何问题欢迎在底下评论,我们一起交流,一起加油!
import cv2 as cvimport numpy as npdef access_pixel(image):#属性的读取print(image.shape)height = image.shape[0]width = image.shape[1]channels = image.shape[2]print("width: %s, height: %s, channels: %s"%(width,height,channels))#遍历每一个像素点,太慢了,更新for row in range(height):for col in range(width):for c in range(channels):pv = image[row,col,c]image[row,col,c] = 255-pvcv.imshow("numpy_test",image)def inverse(img):dis = cv.bitwise_not(img)cv.imshow("inverse",dis)def create_image():'''img = np.zeros([400,400,4],np.uint8)img[ :, :,0] = np.ones([400,400])*255 #对通道进行赋值,0是蓝通道,1是绿通道,2是红色通道,多通道cv.imshow("new_image",img)'''#初始化灰度图像img2 = np.zeros([400,400,1],np.uint8)img2[:,:,0] = np.ones([400,400])*127#img2 = img2*127cv.imshow("new_image_2",img2)#维度变换m1 = np.ones([3,3],np.uint8)m1.fill(12222.388)print(m1)m2 = m1.reshape([1,9])print(m2)print("---------HELLO-----PYTHON--------------------")src = cv.imread("D:/1.png")cv.namedWindow("input image",cv.WINDOW_AUTOSIZE)cv.imshow("input image",src)t1 = cv.getTickCount()#access_pixel(src)#create_image()inverse(src)t2 = cv.getTickCount()#测试时间消耗time = (t2-t1)/cv.getTickFrequency()print("time:%s ms"%(time*1000))cv.waitKey(0)cv.destroyAllWindows()
每天进步一丢丢