【JAS】美国工程院院士Tamer Basar:遥感系统数据传输规划与解码估算策略研究

IEEE/CAA JAS第6卷1期最新发表来自University of Illinois at Urbana-Champaign的Tamer Basar教授关于对抗性扰动的遥感系统数据传输规划与解码估算策略研究。该研究通过建立合理假设,求取了上述Stackelberg博弈在满足状态反馈条件下的均衡解。
一个典型的遥感系统由传感器、编码器和解码器三部分构成,其主要用于对某一离散时间的随机过程进行观测、数据传输与重构。在每一个采样时间下,遥感系统中的传感器对随机过程的状态变量进行观测。由于传感器的能量供给有限,因此其所能够对外传输数据的能力亦有限(传感器往往没有足够能量来将随机过程的所有采样都传输出去)。
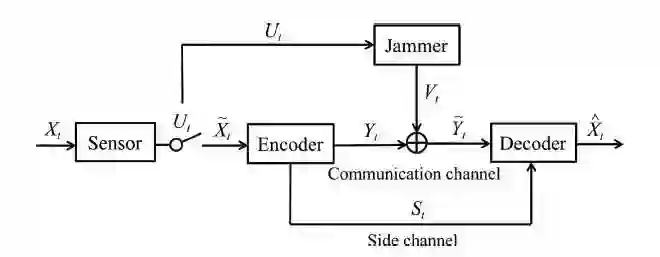
于是,传感器在每次测量完成后,需要决策是否将本次测量的数据传输出去。若传感器决定对外传输数据,则会将观测得到的数据先送入编码器。编码器随后对数据编码,接着将经过编码的数据通过一个可靠的信道传输至解码器端。如若传感器决定不传输数据,则传感器与编码器均不工作。然而,不论是否接收到来自传感器与编码器的数据,解码器总是保持工作状态,持续对被测量的随机过程进行重构,即持续对被测量的随机过程中的状态变量进行估算。
上述遥感系统的运行成本主要来自于三个方面:
(1)传感器对外传输数据的能耗(若传感器决定不传送数据,则传感器无能耗);
(2)编码器对数据进行编码的能耗(若传感器决定不传送数据,则编码器亦无能耗);
(3)解码器在估算随机过程状态变量过程中所产生的误差。遥感系统的工作目标即为:最小化上述三方面成本的总和。
在上述遥感系统发挥作用时,环境中往往还存在着某个干扰源。该干扰源持续不断地向编码器—解码器通信信道发射噪声。于是,经过编码器编码的数据,在向解码器传输的过程中会发生畸变。干扰源的运行成本来自于其发射噪声所消耗的能量。与此同时,干扰源会因为使编码信号发生畸变而获得奖励:解码器端的估算误差越大,干扰源获得的奖励也就越大。干扰源的工作目标可归纳为:在最小化自身能耗的同时,最大化自身所能获得的奖励。
遥感系统与干扰源具有迥异的工作目标,且其中任意一方在追求自身目标的过程中,势必会影响到另一方对于其目标的实现。即,遥感系统与干扰源的交互行为具有典型的对抗性。针对这一问题,本文提出了如下思路,用以定量描述遥感系统与干扰源的交互特性。具体来说,本文将遥感系统与干扰源的交互行为抽象为包含有一个领导者和一个追随者的Stackelberg博弈。其中,博弈的领导者即为遥感系统(包含传感器、编码器、解码器),而博弈的追随者为干扰源。在博弈过程中的每一个时间步长下,遥感系统率先向干扰源声明自身传感器传输数据的时间规划策略、编码器的编码策略以及解码器估算随机过程状态变量的估算策略。随后,干扰源方才声明自身的干扰策略。
本文通过建立合理假设,求取了上述Stackelberg博弈在满足状态反馈条件下的均衡解。该均衡解包含一个基于门槛值的传感器数据传输时间规划策略,以及一对具有分段特性的编码器编码与解码器估算策略。在此基础上,依据上述Stackelberg均衡解,对遥感系统的性能进行了仿真分析。仿真结果表明:
(1)在干扰源的单位能耗相对于编码器更加昂贵的情况下,干扰源在工作中将倾向于降低其自身能耗,以至其产生的噪声信号减弱。因此,遥感系统的工作成本得以降低——具体表现为:编码器的能耗降低,解码器的估算误差降低;
(2)在干扰器与编码器的单位能耗比保持恒定的情况下,随着传感器传输数据能力的增强,遥感系统的工作成本总体呈现降低趋势。然而当传感器传输数据的能力达到某一门槛值后,遥感系统的工作成本将保持不变;
(3)在干扰器与编码器的单位能耗比恒为1的情况下,当传感器尚不具备传送随机过程全部采样的能力时,随着随机过程时域的增长,编码器能耗也发生增长;而当传感器具有传送随机过程的全部采样的能力时,编码器能耗则保持恒定,不再受到随机过程的时域长度的影响。

扫描二维码获取全文
Xiaobin Gao, Emrah Akyol and Tamer Başar, "Communication Scheduling and Remote Estimation With Adversarial Intervention," IEEE/CAA J. Autom. Sinica, vol. 6, no. 1, pp. 32-44, 2019.

Xiaobin Gao 美国伊利诺伊大学研究助理,2018年获该校博士学位,主要研究方向为传感器网络、遥感估算、信息物理系统、切换系统、分布式计算。

Emrah Akyol 美国纽约州立大学宾汉顿分校电子与计算机工程系助理教授。2013至2017年,南加州大学、伊利诺伊大学博士后。主要研究方向为博弈论、通信、控制理论、机器学习在信息物理系统设计及安全性分析中的应用。

Tamer Basar 美国伊利诺伊大学教授,美国国家工程院院士、欧洲科学院院士,IEEE Fellow,IFAC Fellow,SIAM Fellow,获国际自动控制联合会IFAC Giorgio Quazza Medal奖、IEEE控制系统协会(IEEE CSS)最高奖、美国自动控制委员会(AACC)最高奖、国际动态对策学会(ISDG)最高奖、IEEE控制系统技术领域奖等多个奖项和荣誉,曾任IEEE CSS主席、AACC主席、ISDG创会主席。在系统、控制、通信、网络等领域已发表900多篇期刊文章和多部专著。主要研究方向为动态博弈、网络安全、分布式检测与估计、多智能体系统、控制与博弈论应用、能源系统、信息物理系统等。
来源:JAS自动化学报英文报
往期文章推荐
🔗【重要通知】中国自动化学会关于2019年度国家科学技术奖提名工作的通知
🔗【重要通知】关于征集2019重大科学问题和工程技术难题的通知
🔗【学科发展报告】无人船
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:会员(代表)大会
🔗【重要通知】中国工程院关于委托组织学术团体提名2019年院士候选人的通知
🔗【全国学会优秀改革案例汇编】学会治理结构与治理方式:理事会(常务理事会)