《多旋翼飞行器设计与控制》2019年春季课程简介


近年来,多旋翼飞行器发展迅速。不仅仅在航拍领域,多旋翼还在农业植保、电力巡线、地质勘探、交通管理、快递运输等方面同样具有非常可观的发展前景。本门课程讲授多旋翼设计、动态模型建立、状态估计、控制和决策等方面的基础知识。涉及到空气流体力学、电机、电路、材料结构、理论力学、以及导航、制导与控制各个学科的基础知识,具有基础性和系统性两个特色。因此,有利于学生将已学知识融会贯通,着重培养学生解决问题的综合能力。
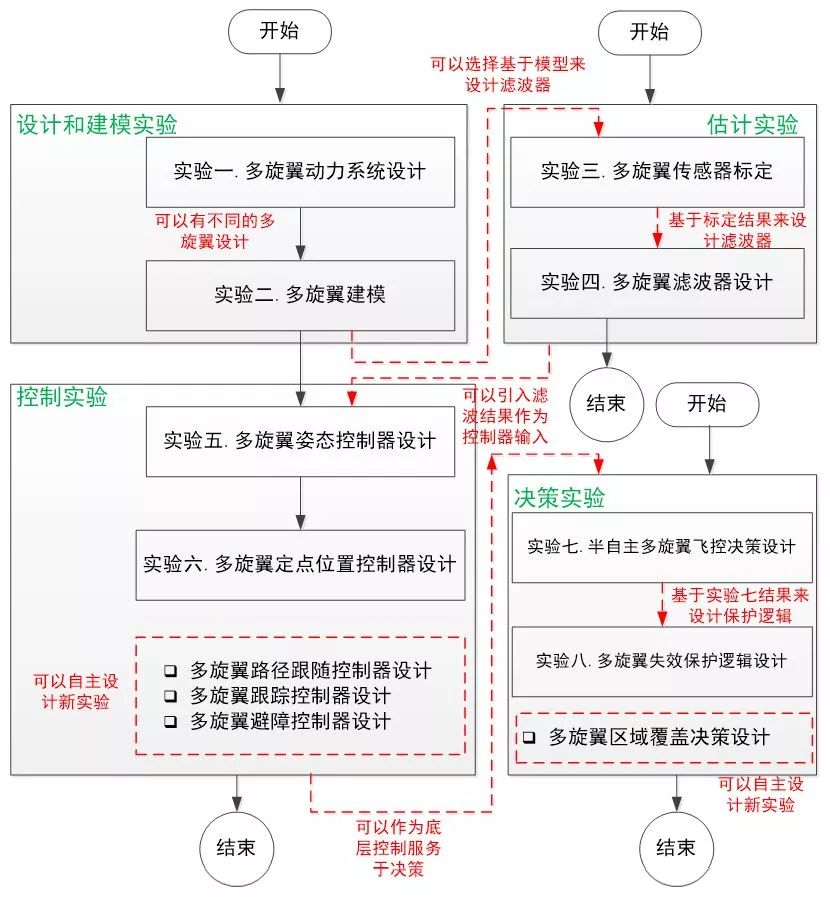
2019年课程增加了贯穿整个课程的系列仿真实验(大作业),由浅入深,匹配各种背景的同学。新增实验的特点:
(1)实验模块化。系列仿真实验的每个版块的实验可以被单独完成,保证了不因一个问题影响全局。
(2)循序渐进。实验留有例程,并由浅入深,分为递进三步。
(3) 实验内容差异化。需要设计不同的飞行器,这样将会使模型各不相同,而且建模方法也可以各不相同,控制实验的设计也各不相同;
(4)学生能力差异化。通过增加实验项目和附加实验,挑战有基础的同学。
课程编号: 031574
课程名称: 多旋翼飞行器设计与控制
主讲老师: 全权 副教授
学 时: 32学时
开课学期: 春季
上课时间: 2019年2月28日 - 2019年5月16日,每周四晚7:00-9:30
第一次课2月28日(周四)
上课地点: 北航新主楼B122
1
(1)专业:面向控制科学与工程专业特别是导航、制导与控制专业。
(2)学生:控制科学与工程专业特别是导航、制导与控制专业的研究生,或有一定航空和自动化专业背景的研究生。
本门课程讲授多旋翼设计、动态模型建立、状态估计、控制和决策等方面的基础知识。涉及到空气流体力学、电机、电路、材料结构、理论力学、以及导航、制导与控制各个学科的基础知识,具有基础性和系统性两个特色。因此,有利于学生将已学知识融会贯通,着重培养学生解决问题的综合能力。
自动控制原理,航空航天概论、理论力学、线性系统(建议)
课堂授课、学生大作业展示
首先介绍飞行器的基本概念、评价、以及多旋翼的历史,以及本课的安排。
通过这一阶段,学生可以对多旋翼机身主体设计和动力系统选择有一个较为深入的认识。
2.1 多旋翼的基本组成。这一部分包括机身主体、动力系统、控制系统和通讯链路等四个部分。主要按作用和指标参数两个方面分别介绍机架、起落架、云台、涵道、电机、电调、螺旋桨、电池、遥控器和接收器、自动驾驶仪、地面站、数传电台、图传电台、通讯协议等方面。
2.2 多旋翼的机身主体设计。这一部分包括机体基本构型,以及减震和降噪的考虑等。
2.3 多旋翼动力系统性能建模和估算。多旋翼的动力系统由航模电池、电子调速器、直流无刷电机和螺旋桨四个部分组成。这一部分包括对这四个部分建立力和能量方面的数学模型,提出动力系统的飞行性能估算,比如:悬停状态下的续航时间和最大负重等等。
通过这一阶段,学生可以对多旋翼运动模型有一个较为深入的认识。基于这个基础,可以做多旋翼状态估计和控制。
3.1 坐标系和姿态表示。主要介绍世界惯性坐标系和机体系,以及姿态的三种表示方法:欧拉角、旋转矩阵和四元数。
3.2 多旋翼的动态模型。这一部分包括姿态模型、动力学模型、控制分配模型、电机模型,还包括气动阻力模型。这将为后续的多旋翼位姿估计和控制等课程服务。
通过这一阶段,学生可以对多旋翼信息估计有一个较为深入的认识。
4.1 传感器模型以及校正。这一部分首先建立这些传感器的测量模型,进而进一步提出较正方法,估计需要较正的参数。
4.2 可观性和卡尔曼滤波。
4.3 多旋翼的运动信息估计。这一部分包括姿态估计、位置-速度估计、速度估计和障碍估计的介绍。
通过这一阶段,学生可以对多旋翼控制有一个较为深入的认识,所介绍的方法大部分是较为常用的方法。
5.1 多旋翼的稳定性和可控性。
5.2 多旋翼的底层控制。给出目标位置,如何控制多旋翼飞行到目标位置。
5.3 基于半自主飞控平台的位置控制。这一部分主要考虑将自动驾驶仪当作一个“黑箱”,从而在自驾仪基础上做二次开发。本章主要包括系统辨识和控制器设计两部分。
通过这一阶段,学生可以对多旋翼顶层决策有一个较为深入的认识。决策分为两个方面:完成任务和保证安全。
6.1任务决策。以任务为导向,任务决策主要决定多旋翼下一步“去哪儿”,进一步,需要规划路径,使得整个过程能满足诸如:飞向航路点并沿航线飞,以及飞向航路点并避障等要求。
6.2 健康管理和失效保护。以安全为导向,失效保护主要决定多旋翼下一步“去哪儿”。多旋翼飞行器在飞行前或飞行中,可能会发生通信故障、传感器失效和动力系统异常等,这些意外会直接导致控制任务无法完成。这一部分包括安全问题的介绍、机载设备的健康评估、机载设备的健康监测、失效后的保护建议。
本章列举了能够推动多旋翼发展的潜在的新技术、给出了风险分析和建议、分析了多旋翼飞行器的新应用以及总结了未来的需求和展望。这一阶段还包括学生的作业展示。
大作业和展示。
英文教材:Quan Q. Introduction to Multicopter Design and Control[M]. Springer Singapore, 2017.
中文教材:全权著, 杜光勋等译. 多旋翼飞行器设计与控制[M]. 电子工业出版社, 2018.
全套中英文课件、代码下载地址:http://rfly.buaa.edu.cn/resources/
无人机设计与控制论坛: https://flyeval.com/forum/
新版选课系统选课方式:

转自丨北航可靠飞行控制研究组
往期热文(点击文章标题即可直接阅读):






