【CoRL2020最佳论文】学习潜在表示以影响多智能体交互作用

第四届机器人学习大会(CoRL)日前公布了最佳论文奖和最佳系统论文奖的入围名单。自 2017 年启动以来,CoRL 已迅速成为全球机器人和机器学习交叉领域的顶级学术会议之一。针对机器人学习的研究涵盖了机器人技术、机器学习以及控制等广泛的主题,包括理论和应用领域。
CoRL 2020 大会将于 16 日开始持续到 11 月 18 日。今年提交的论文有 475 篇,比 2019 年增加了 20%。有 165 篇论文被接受,接受率为 34.7%,略高于去年的 27.6%。
本次荣获CoRL最佳论文奖的是来自斯坦福大学和弗吉尼亚理工大学合作的《Learning Latent Representations to Influence Multi-Agent Interaction》。
论文链接:https://www.zhuanzhi.ai/paper/6405e6395e7a17f319bc2bde4d7b64be
作者: Annie Xie, Dylan P. Losey, Ryan Tolsma, Chelsea Finn, Dorsa Sadigh.
论文介绍:
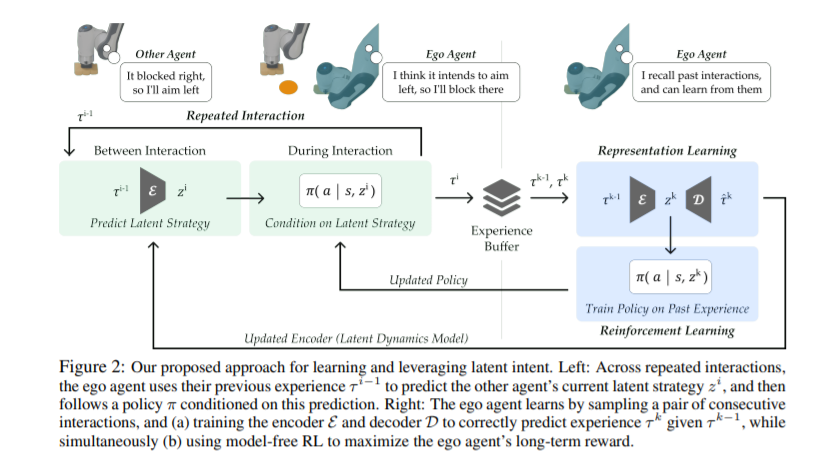
智能体与人类或机器人的无缝交互很困难,因为现实环境是动态变化的,并根据自智能体的行为更新策略,而自智能体必须预测这些变化以随机应变。受人类行为启发,我们认识到机器人不需要显式地为另一个智能体要进行的每一个低级动作建模;相反,我们可以通过高级表征来捕捉其他智能体的潜在策略。我们提出了一个基于强化学习的学习框架来学习一个智能体策略的潜在表示,其中自智能体识别其行为与另一个智能体的未来策略之间的关系。然后,自智能体利用这些潜在的动力来影响另一个智能体,有目的地引导他们走向共同适应的策略。在多个模拟领域和一个真实的空中曲棍球游戏中,本文的方法要优于其他方法,并学会了影响其他智能体。
专知便捷查看
便捷下载,请关注专知公众号(点击上方蓝色专知关注)
后台回复“LRMAI” 就可以获取《【CoRL2020最佳论文】学习潜在表示以影响多智能体交互作用》专知下载链接





