【PHM算法】PHM算法 | 故障诊断建模方法
天泽智云CyberInsight
本文将从故障诊断的概念、常用算法及应用案例三个方面,解读故障诊断建模方法。
什么是故障诊断?
诊断是指通过检查观察到的症状来确定问题的本质。故障诊断的目标是将高维特征向量转换为状态标识,即标识出健康/故障,其中故障又分为多种失效模式。
数据驱动的故障诊断分为两个阶段:训练阶段和测试阶段。
训练阶段:训练故障诊断模型
在训练阶段,需要大量的历史数据、样本及多维特征。有些历史数据可以通过机理/经验丰富专家的经验对当前状态打标签(如是否健康/故障是什么等级等),但工业领域的数据多数情况都缺少标签,要么全部都是健康数据,要么根本不知道是故障/健康数据。这两种情况分别对应有监督学习和无监督学习,可以运用相应算法训练出故障诊断模型。
测试阶段:测试当前状态识别
在测试阶段,将设备的特征提取出来,放到训练好的故障诊断模型里,从而计算出当前的状态标识。
支持向量机(SVM)
支持向量机(SVM)最早于1963年由VladimirN. Vapnik和Alexey Ya. Chervonenkis提出,在解决小样本、非线性及高维模式识别中表现出许多特有优势,并能够推广应用到函数拟合等其他机器学习问题中。
>> 线性问题
支持向量机(SVM)可以实现线性问题分类,有效解决二分类问题。
核心思想:找到最优分类面将正负样本分开,使得样本到分类面的距离尽可能远。
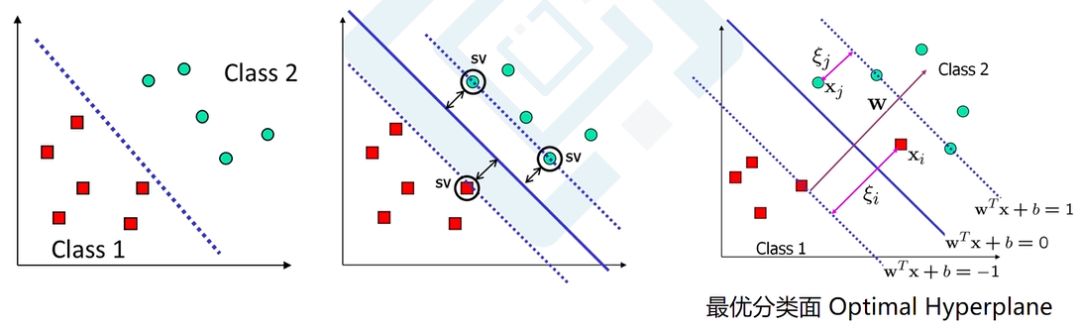
如上图所示,在二维图中是一条直线,在多维高维空间里则是一个超平面。通过运用数学规划和优化算法,让正负样本到超平面的距离尽可能的远,从而找到最优分类面。
>> 非线性可分问题
支持向量机算法除了能对线性问题进行分类之外,还可以对非线性可分的问题进行分类,我们可以使用1992年提出的核函数技巧(The Kernel Trick)的方法,利用函数把低维特征映射到高维的空间。
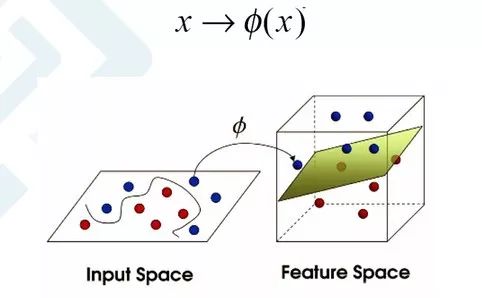
如图所示,左边图样本特征在二维空间里是不可线性可分的,但是把它映射到高维空间中,就以找到一个平面将其分开。
常用的核函数包括多项式函数(Polynomial)、高斯函数(Gaussian)、径向基函数(Radial Basis Function)、Sigmoid函数等。在Python和Matlab中都有非常成熟的算法包供大家调用,而且也可以选择不同的核函数来解决线性不可分的问题。
>> 多分类的故障诊断问题
SVM虽然是二分类问题,但是也可以解决多分类的故障诊断问题,具体如何实现?
举例而言,比如说已知共有ABCD四类,A是健康,BCD是三种不同故障模式,首先可以用一个分类器去分类是健康/故障,即是A/不是A;之后在不是A的部分中再训练一个分类器来分类,是B故障/不是B故障。简言之就是用层层迭代的方法,通过多种SVM分类器的组合来实现多分类问题。
除了SVM支持向量机的方法,机器学习中还有许多其他常用的分类算法,如随机森林、AdaBoosting、人工神经网络等,这些都是能非常强大的工具,可以更清晰地解决分类问题。
以上几种方法都需要有明确的故障标签,是一个有监督的学习过程。而在工业场景中的数据大多是无标签的/健康的,无法满足以上方法的基础条件,这就需要通过其他方法来进行解决。
自组织映射神经网络(SOM)
SOM的优点在于能够不断学习训练数据的内在模态和模式,形成神经网络模型,把高维特征矩阵转化为二维蜂窝状的映射图,实现整个故障的分类。
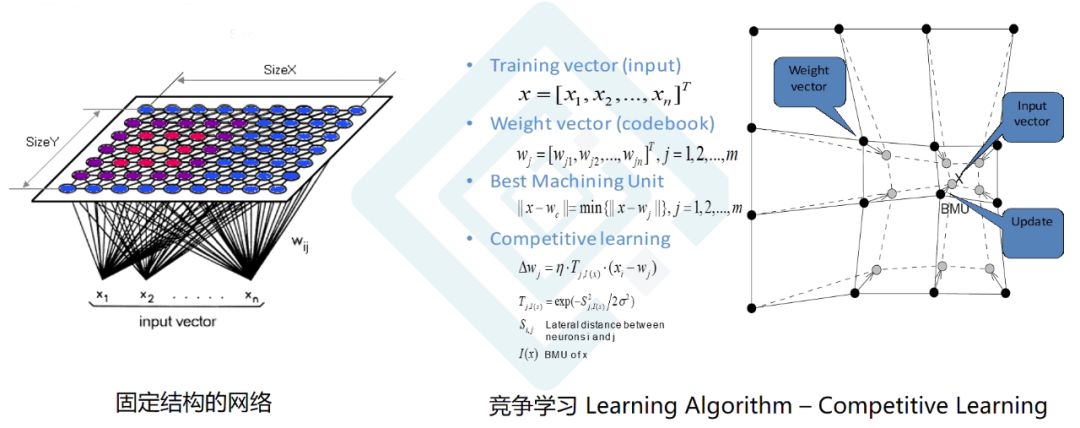
其核心机制是竞争学习。首先根据训练数据的样本大小和特征的维度,来构造初始SOM网络的模型结构,上面的每一个神经元通过不同的群众向量来表达;之后基于竞争学习的更新策略不断迭代更新,移动神经元的位置形成不同的BMU,最大程度靠近所属聚类。
SOM在进行故障诊断和健康评估时并非完全相同,区别如下:
在进行故障诊断时,把状态样本放到训练好的SOM模型中计算出BMU,找到所属类别,则认为是当前状态的故障类别。
而在健康评估的时候,需要在此基础上进一步计算当前状态和BMU之间的距离,作为健康状态的评价指标。
SOM的数据可视化的效果非常好,可以把高维的数据转化为一个蜂窝状的映射图。
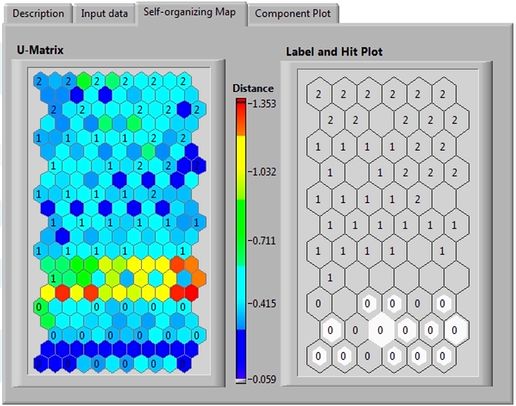
映射图是如上所示的U-matrix,其中的不同颜色表示相邻神经元之间的距离,越偏蓝色距离越近,越偏红色距离越远,当出现一片红色的时候就表示是一个分类面。
在实际应用中,通常采用Hit map,将测试数据放到训练好的U-matrix中,找到Hit Point所在位置,从而确定故障诊断的分类。
>> SOM的优缺点
优点:
SOM的主要优点是能够进行无监督学习,即训练样本中不需要知道有多少分类,也无需故障和健康的标签,就可以将其分类出来
纯粹的数据驱动,可以将数据分类到不同的集群中,不需要数据的先验知识
SOM在许多不同的场景中得到了广泛的应用,并具有广泛的用途
缺点:
为了生成一个没有缺失值的映射图,需要为每个样本的每个维度设置一个值
每个SOM模型都是不同的,从同样的样本向量中可能会发现不同的相似性,有一些随机性的干扰
为了得到一个好的映射图,需要构建许多映射图
需要非常大的计算量
贝叶斯网络(BBN)
上面的几种算法都是从数据本身出发,无需任何的数据的先验知识。而工业领域老专家们的经验是非常重要的一部分,有些老师傅通过听声音/看某些指标的方式就可以判断出设备的故障类型。
在贝叶斯网络中,可以把老专家们的经验统计起来,形成条件概率(A=j | B=i)来描述不同时间之间的因果关系。
贝叶斯定理:P(A|B)=P(A,B)/P(B)
贝叶斯网络是用图模型(Graphical Model)的结构,把整个复杂系统中所有可能发生的情况结构化地表达出来。
>> 有向无环图
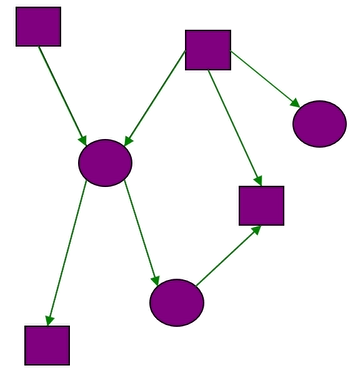
如上图所示,节点表示随机变量,箭头表示条件依赖,有向边给出因果关系。通过统计所有的依赖关系,得出条件概率分布图。
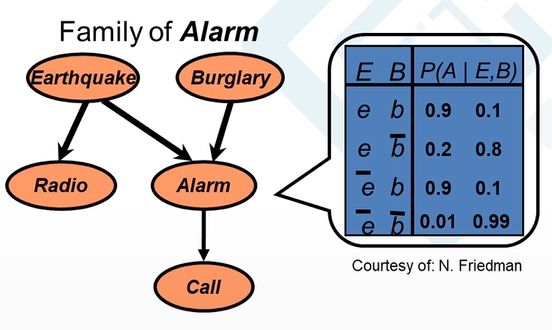
通过一个例子来具体说明,在某家庭报警系统中,地震和入室盗窃都可能引发报警,地震报警的同时会有广播提醒。当地震和入室盗窃同时发生时,90%的概率会报警,而同时不发生的时候,99%的概率不报警,这就是基于经验或机理所得。当系统更为复杂时,上表也随之更为庞大。
>> 如何用贝叶斯网络进行故障诊断?
定义模型的结构、节点数、形式和状态
定义每个节点的条件概率分布(上面例子表中的数据)
利用测试数据,使用多种算法训练BBN
分析输出并确定网络中最敏感的因素
使用不同的算法进行对比
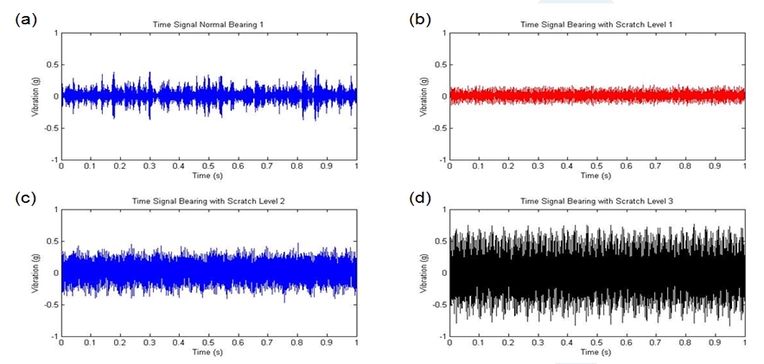
轴承作为典型的旋转类设备,一般通过振动信号进行故障诊断。如下图所示,图a是采集到的多种模式的振动信号,可能由有多种故障耦合在一起,无法直观地判断其故障。下面通过自组织映射神经网络(SOM)的方法进行故障诊断。
准备数据集,确定类标签(如下图所示,共八种故障类型)
根据需要的详细程度确定显示大小
选择SOM模型的网格形式
设置SOM超参数,包括初始权重、学习率等
训练数据生成SOM模型
训练SOM模型,并用Hit-point测试SOM模型

其中,训练出的模型如下图左所示,可以通过SOM将八类故障清晰地区分出来(亮色代表分界线)。
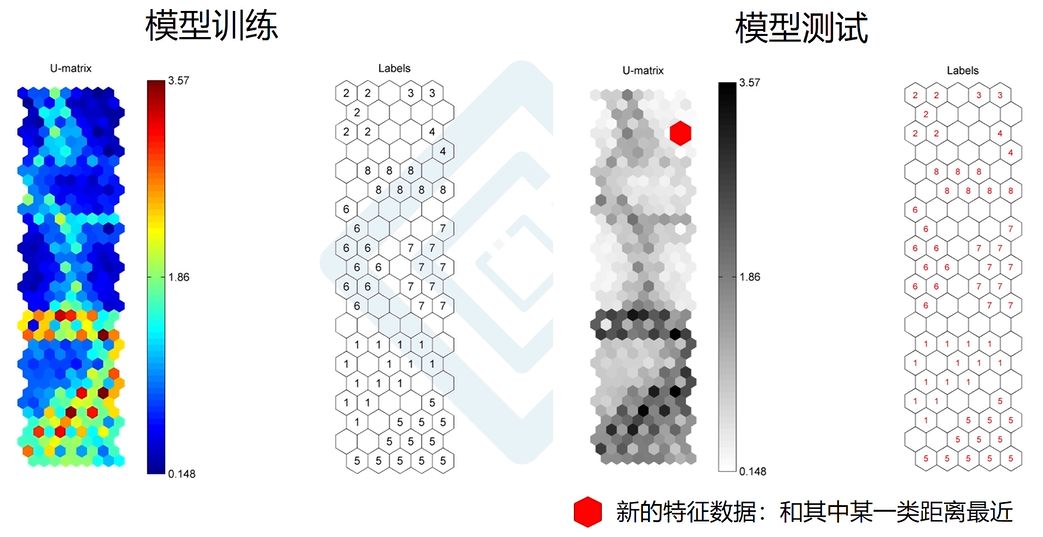
在模型测试时,将新的特征数据(即需要测试的样本)放到SOM U-matrix模型计算后,其位置如上图右红点所示,与八种故障类型的标签进行对比可判断出其属于第四类——外圈故障。
故障诊断问题就是将高维的特征向量转换为状态标识(健康状态、故障模式1、故障模式2、故障模式3……)。
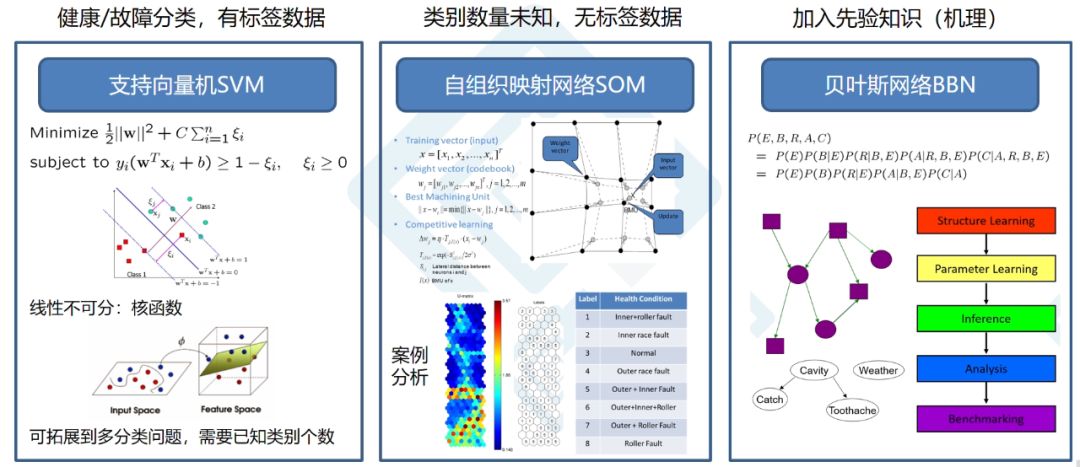
对于有标签的数据,通常采用分类算法,其中最常见的是支持向量机(SVM),但是在SVM中如果遇到一些线性不可分的情况,可以用核函数的技巧把低维特征映射到高维空间中,此外也可以拓展到多分类问题。
面对类别数量未知、无标签的数据,通常采用自组织映射神经网络(SOM),可视化效果好。
以上两者均是单纯从数据驱动的角度得到模型,如果要加入先验知识(机理),则采用贝叶斯网络,可以将每种特征和故障类型之间的关联关系,通过机理给固化下来。

先进制造业+工业互联网
产业智能官 AI-CPS
加入知识星球“产业智能研究院”:先进制造业OT(自动化+机器人+工艺+精益)和工业互联网IT(云计算+大数据+物联网+区块链+人工智能)产业智能化技术深度融合,在场景中构建“状态感知-实时分析-自主决策-精准执行-学习提升”的产业智能化平台;实现产业转型升级、DT驱动业务、价值创新创造的产业互联生态链。

版权声明:产业智能官(ID:AI-CPS)推荐的文章,除非确实无法确认,我们都会注明作者和来源,涉权烦请联系协商解决,联系、投稿邮箱:erp_vip@hotmail.com。


