【泡泡一分钟】基于三维物体重建的层次表面预测(3dv-58)
每天一分钟,带你读遍机器人顶级会议文章
标题:Hierarchical Surface Prediction for 3D Object Reconstruction
作者:Christian Häne, Shubham Tulsiani, Jitendra Malik
来源:3dv 2017 ( International Conference on 3D Vision)
播音员:水蘸墨
编译:陈世浪 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

近年来,卷积神经网络在三维几何预测中已经取得了可喜的成果。卷积神经网可以从非常小的输入数据(例如单色图像)进行预测。卷积神经网络的一个主要限制是只能预测一个粗分辨率的体素网格,而不能很好的显示物体表面。
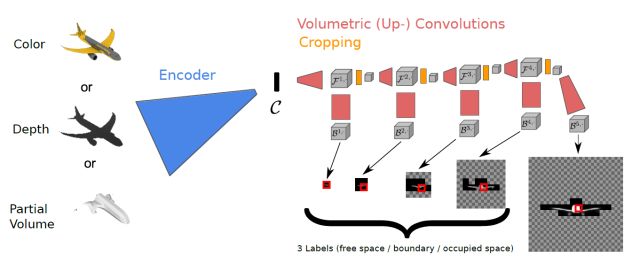
本文提出了一个通用的框架,称为层次表面预测(HSP),这有助于预测高分辨率的体素网格。这种框架能对高分辨率体素网格的表面能有一个很好的预测。对象的外部和内部可以用粗分辨率体素表示。我们的方法不依赖于特定的输入数据类型。
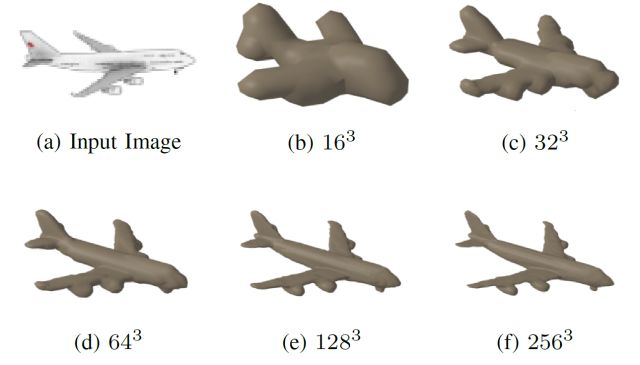
文中结果展示了彩色图和深度图的几何预测,还有根据部分体素网格进行形状重现。我们的分析表明我们方法中的高分辨率预测比低分辨率预测更准确。
下图是本文所提出的框架的概览:
不同像素精度的效果图:
Abstract
Recently, Convolutional Neural Networks have shown promising results for 3D geometry prediction. They can make predictions from very little input data such as a single color image. A major limitation of such approaches is that they only predict a coarse resolution voxel grid, which does not capture the surface of the objects well. We propose a general framework, called hierarchical surface prediction (HSP), which facilitates prediction of high resolution voxel grids. The main insight is that it is sufficient to predict high resolution voxels around the predicted surfaces. The exterior and interior of the objects can be represented with coarse resolution voxels.Our approach is not dependent on a specific input type. We show results for geometry prediction from color images, depth images and shape completion from partial voxel grids. Our analysis shows that our high resolution predictions are more accurate than low resolution predictions.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接: https://pan.baidu.com/s/1CCvKF58aIgUwnqfPxDOdfQ 密码: yirp


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



