报名 | 中科新松参观(上海站)

大家报名时备注暗号“数据派读者”,有优先通过权
相关领域技术人员和创业者优先~
启迪之星(上海)于2016年在上海建设启迪之星AI创新中心,整合十余家产业龙头企业,共同搭建产业资源平台。这些企业均具有核心产品、市场需求或渠道资源,他们都将会为争取到优质AI技术创新团队提供重磅产业资源。
4月17日下午,启迪之星(上海)AI创新中心将带领创业团队走访中心合作伙伴之一的“中科新松”,希望为中心内计算机视觉创业团队和市场需求搭建对接平台。同时开放社会名额,欢迎面向智能制造和计算机视觉方向的初创团队和感兴趣的小伙伴报名参与哦~
参与活动的创业团队可以获得什么?
对接产业龙头企业
新松公司隶属中国科学院,是一家以机器人技术为核心,致力于数字化智能制造装备的高科技上市企业,是全球机器人产品线最全的厂商之一。在沈阳、上海、杭州、青岛建有机器人产业园,在北京、广州、香港等城市设立多家控股子公司,在上海建有新松国际总部。目前,公司总市值位居国际同行业前三位,成长性机器人行业全球第一。
开拓潜在市场
作为中国机器人行业的领导企业,中科新松致力于用创新技术引领中国机器人行业发展,积极构建中国机器人行业生态,对接人工智能尖端技术与机器人应用场景的深度结合。中科新松有限公司向启迪之星(上海)AI创新中心两个需求“命题”,创业团队将有机会获得来自新松机器人的订单哦!
对接潜在资本
活动还有神秘投资人同行哦~
还等什么?赶快报名吧!点击文末“阅读原文”或扫描下方二维码报名~
【活动时间】4月17日下午14:00-17:00(13:30集合签到)
【活动地点】上海市浦东新区金桥经济技术开发区金藏路257号ROBOT HUB
【活动安排】
13:30-14:00 集合签到
14:00-15:00 参观中科新松体验中心
15:00-15:30 中科新松研发部介绍技术场景需求
15:30-16:00 来访项目展示
16:00-17:00 自由讨论


中科新松有限公司是新松机器人集团(股票代码:300024,机器人)在上海设立的国际总部,是新松集团“3+N+M”战略布局中三大总部机构之一。公司业务涵盖智能机器人、智能制造、创新孵化三大板块,为客户提供全方位的业务服务。旗下分别设立新松机器人与人工智能研究院、新松工业4.0综合研究院、星智汇机器人创客空间。
其智能机器人产品主要包括:柔性协作机器人、双臂协作机器人、轻载复合机器人、乒乓球机器人等,涵盖工业、军用、民用等多个方向。同时,可按照行业客户需求开发定制特殊用途的机器人产品。
位于上海浦东新区临港综合区的新松临港产业基地,主要用于新松自主研发的新一代智能机器人产品及核心部件的中试、生产。同时运用新松丰富的机器人产品系列以及强大的机器人系统技术,开展工业4.0系统解决方案,为客户提供集核心制造技术开发、工艺流程研究及系统规划于一体的数字化工厂集成规划、设计与总装总调工作。
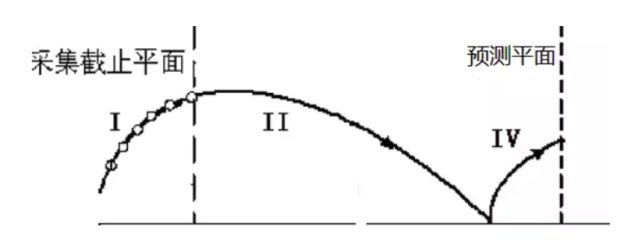
命题一:高速运动物体的轨迹预测系统
算法:深度学习
训练数据:若干组(具体数据量待定)基于时间序列的运动物体完整飞行轨迹(包含I、II、IV)。
输出:根据采集截止平面之前的轨迹数据(I)获得运动物体通过预测平面时的信息(时间、位置、速度)
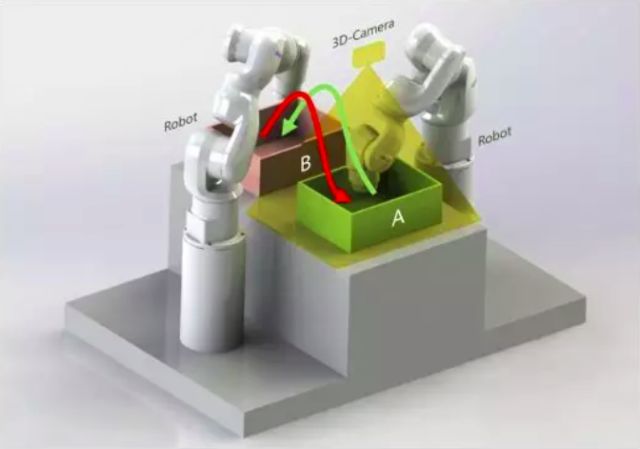
命题二:三维视觉抓取
主要技术点:数据集生成,实际拍摄图片所得到的数据库数量十分有限,通过虚拟仿真环境来生产训练所需数据集,利用虚拟生成的数据集及相关网络模型(FCN、Mask-RCNN等)进行训练。完成基于点云/图像的分割、识别、配准算法研究,充分融合点云和图像信息,比如:点云分割、工件6D位姿获取;
抓取策略规划:通过算法,得到工件最佳抓取位姿,提高抓取成功率。
对于工作在自动化生产线上或柔性制造系统中的工业机器人来说,其完成最多的一类操作是“抓取—放置”动作,比如流水线上的工件搬运、装配以及各工位之间的工件转移和上下料。机器人抓取分拣技术的应用环境大致可分为三类:
Structured(结构性)
Semi-Structured(半结构性)
Random(无序)
目前来看,工业机器人只能完成固定模式物体的抓取,也就是在前两类环境中,机器人可以轻易并快速分拣。而对于复杂堆叠物体的识别和分拣,依然有90%以上通过人工方式完成,极大的限制了工业生产的效率。
面对广泛存在的实用场景,工业机器人老牌强国德国和日本都有多家公司参与,连一贯以芯片、软件、互联网而为人称道的硅谷都有数家创业公司进入。一些物流企业也已经进行了使用机器臂抓取货品的演示。然而,现有的解决方案价格高昂而且效果差强人意,客户接受程度很低。因此,机器人在这些新场景中还是远远没有得到大规模的应用。无序分拣问题(Bin-Picking)也因此被称为机器人研究“圣杯”。
其难度在于,对物件进行反复抓取时,机器人必须面对一个无序的环境,同时料框内物件的位置时常变换。具体来看,机器人无序分拣实现的难题还包括:
工业常用的金属、玻璃等材质易引起强反光;
工业工件一般无明显的特征供识别;
物体随机摆放易导致物体重叠、遮挡、阴影和复杂背景;
需适应可能存在的微光、黑暗、灰尘和油脂等恶劣工业环境等。
虽然国外已有包括Pickit3d和Aquifi在内的多家竞争对手,但国内尚未看到成熟的方案,近年来,国内陆续出现了一些针对工业领域推出3D视觉定位系统的企业,但这些解决方案还基本停留在研究院,实质性产品极少见,可以说还处在空白状态。市场亟待一款应用于工业流水线及物流领域的立体视觉抓取系统,系统包含基于立体视觉技术的深度相机及相关识别算法,能够完成对任意摆放的同类工业物品进行检测识别及姿态估计;配合运动规划等技术,机械臂可以自主完成规划和抓取操作,自动完成识别分拣相关任务。
传统的机器人完成这类的操作,需要按照指定的程序在指定位置完成预设的操作,而不能根据环境、工件的变化而柔性操作。而在如今愈加复杂的工业应用中,工业相机的应用使机器人具备了环境感知的能力。现有结合工业相机的机器人在进行抓取任务时,大多采用点云进行抓取位姿估计,然而其在进行物体图像分割时效率较低,影响整体的抓取效率。
随着深度学习的快速发展,利用深度神经网络来进行图像中的物体对象分割及分类的算法愈加成熟,其准确性以及效率均得到了大幅度的提升,因此机器人行业也在逐渐尝试将深度学习与机器视觉相结合,以实现更高精度及更高效的机器人抓取任务。