点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
1.是否看完《视觉SLAM十四讲》,敲完例程代码,仍然不知道如何开始自己的SLAM研究第一步?
2.是否知道选择什么样的传感器来进行slam系统搭建?激光or相机?激光和相机分哪几种?又有哪些厂家可以推荐?
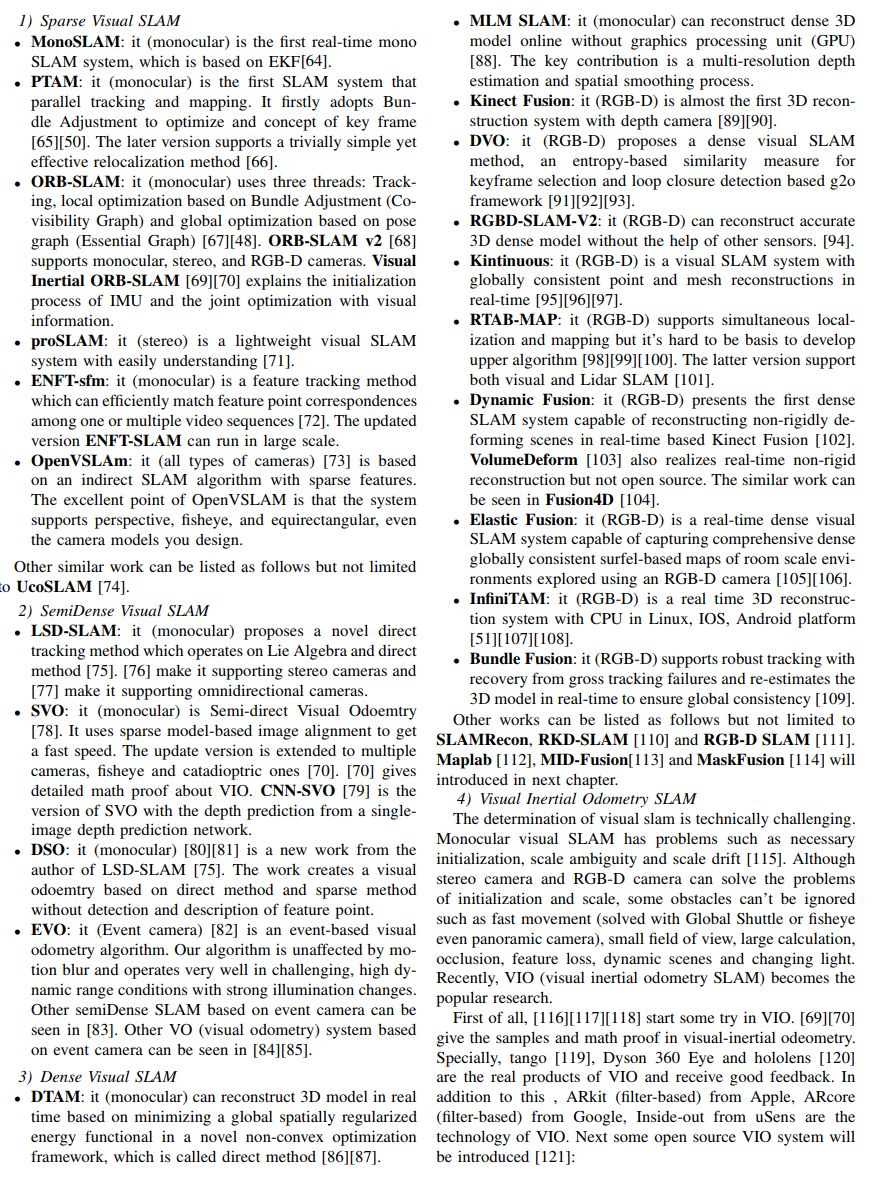
3.是否知道orb-slam, vins等各种slam系统以及各种改进版,和Elasticfusion, Bundle Fusion等各种fusion,以及稀疏,半稀疏,稠密slam却不知道如何从大局去分门别类?
4.是否看到关于单目深度估计,尺度恢复,识别分割,动态语义等方向的论文,不知如何把论文知识点归类?
5.是否知道单目,双目,深度相机,事件相机以及全景相机的构建原理,但是不知道其支持适配的slam系统?
6.是否知道如何快速标定不同传感器之间的参数,例如多相机,相机与惯导,激光雷达与惯导,相机与激光雷达,相机与深度传感器。
7.是否知道用人用声纳在水下,无线信号如wifi也可以构建slam系统?
8.是否各种微信软文,各种知乎专栏,各种github仓库收藏了一大堆,仍然搭建不起来自己的slam系统观?
这篇综述性总结通通告诉你,作者耗时2个月精心打造且仍在不断更新,给你最直接的,最高效的SLAM领域上帝视角。
不管你是slam新手,还是slam老手,你都将在这篇文章中得到满满的收获。
本论文主要讲述了3个大部分:激光slam,视觉slam和激光视觉等多传感器融合slam。
1.激光slam涉及激光传感器的原理介绍,产品选型,开源激光slam系统的介绍,比较,分类。而后介绍了深度学习在激光slam中的应用,以及激光slam的挑战和未来。
2.视觉slam涉及视觉传感器的原理介绍,产品选型,开源视觉slam系统和视觉惯性系统的介绍,比较,分类。而后介绍了深度学习在视觉slam中的应用,以及视觉slam的挑战和未来。
3.激光视觉等多传感器slam系统涉及多传感器之间的内外参标定方法(v1版论文主要是激光和视觉两种传感器,v2涉及其余传感器比如声纳,无线wifi信号),以及从硬件层,数据层,任务层去介绍现在的多传感器融合工具和融合技术,融合产品,最后介绍了多传感器融合的挑战与未来。
![]() 图2. 部分逻辑xmind图
图2. 部分逻辑xmind图
![]()
阅读原文跳转论文v1链接:(v2版最近推出,作者已提交arxiv,待审核后发布,可追踪下文链接,获取最新版论文)
https://arxiv.org/abs/1909.05214
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、算法竞赛、检测分割识别、三维视觉、医学影像、自动驾驶、计算摄影等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
![]()
推荐阅读
汇总 | SLAM、重建、语义相关数据集大全
吐血整理 | SLAM方向国内有哪些优秀的公司?
最强战队 | 三维视觉、SLAM方向全球顶尖实验室汇总
SLAM方向公众号、知乎、博客上有哪些大V可以关注?
汇总 | 最全 SLAM 开源数据集
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
从零开始一起学习SLAM | 点云到网格的进化
从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码
从零开始一起学习SLAM | 掌握g2o顶点编程套路
从零开始一起学习SLAM | 掌握g2o边的代码套路
从零开始一起学习SLAM | ICP原理及应用
从零开始一起学习SLAM | 用四元数插值来对齐IMU和图像帧
最新AI干货,我在看 ![]()
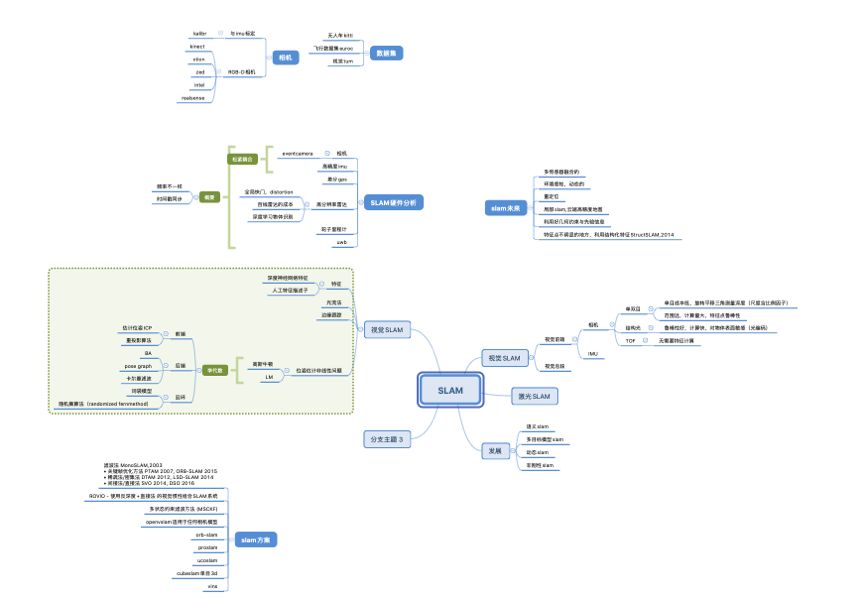 图2. 部分逻辑xmind图
图2. 部分逻辑xmind图