面向虚拟现实仿真环境的头颈部外骨骼系统

▲基于虚拟现实技术的汽车驾驶舱仿真系统
在以头盔显示器作为视景系统的驾驶舱仿真系统中,存在较为突出的问题有两个:一是性能参数较高的头盔显示器体积与质量大,使用时存在异物感、沉重感,影响了自身的使用舒适性和整个仿真环境的逼真度;二是跟踪器较差的抗干扰能力、较低的跟踪稳定性和精度影响了虚拟场景的生成实时性,造成了视觉延时,降低了仿真环境的真实感。因此,有必要在提高头盔显示器使用舒适性、跟踪器稳定性与实时性方面开展研究工作,提升整个仿真系统的逼真度、沉浸感和实用性。

针对现有分辨率和对比度高、视场角大、专业级立体显示的头盔显示器一般在使用过程中会出现运动不便,定位跟踪干扰大,有沉重感、束缚感和异物感等问题,《面向虚拟现实仿真环境的头颈部外骨骼系统》(李鹏, 吴东苏著. 北京: 科学出版社, 2018.11)一书以高精度与短延迟跟踪、低工作负荷的功能需求为目标,从提高头盔显示器佩戴舒适性的角度出发,提出一种主要由6URHS 并联机构和传统头盔显示器组成的新型虚拟现实设备—— 头颈部外骨骼系统(head-neck exoskeleton,HNE),并对该系统的若干关键技术进行了研究。
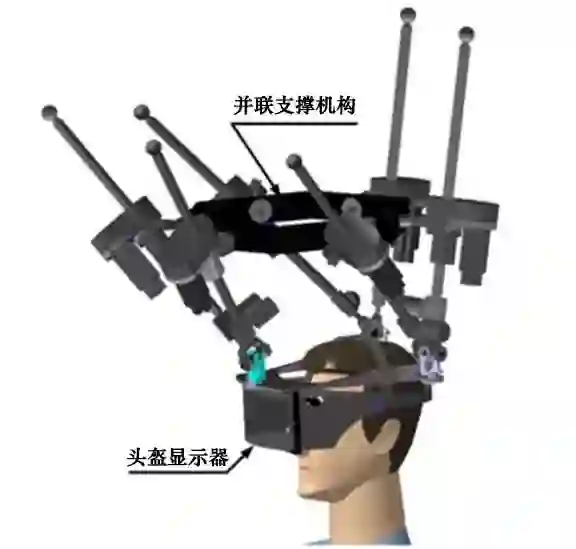
▲ 头盔显示器头颈部外骨骼系统的假想图
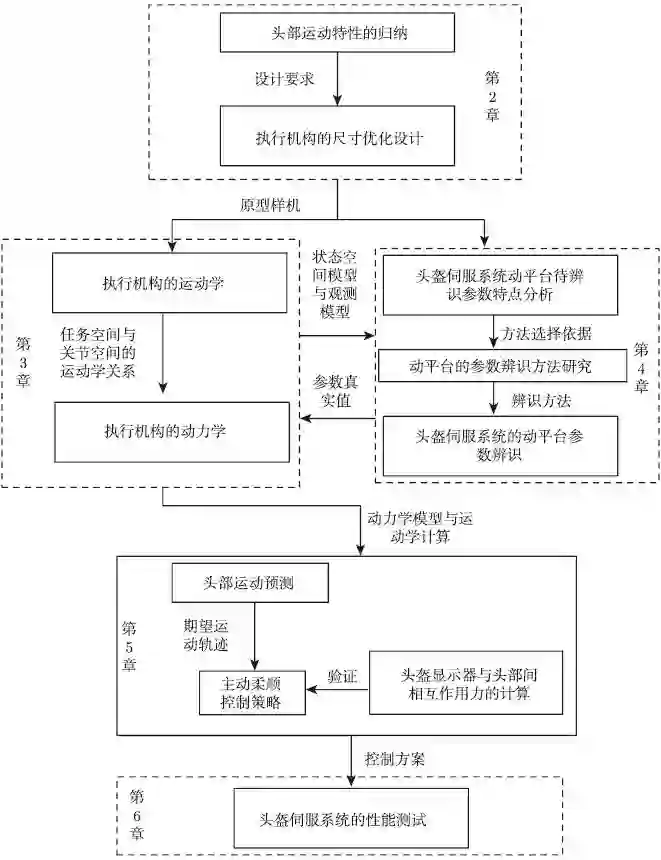
▲ 头颈部外骨骼系统各关键技术间的关系及其组织结构
具体有以下几个方面:
本书首先从人机工程学的角度研究分析了人体的骨骼构造结构、运动结构以及人体关节运动自由度,建立了人体躯干至头部的结构模型,并利用串联机器人运动学正解法对头部运动范围进行了仿真分析;同时考虑了模拟座舱环境空间对人体活动范围的限制,通过选取座舱区域的极限位置点对驾驶员头部运动范围加以环境约束,从而获得更为准确而有效的头部运动范围,通过对实测数据进行量化与修正处理,得到了描述头部运动范围的六维超椭球体和头部运动速度、精度的极限数值,明确了执行机构尺寸优化的性能指标。
其次,提出了一种量化六自由度工作空间的六维超椭球体的计算方法,实现了头部运动空间和HNE 工作空间的统一显性数学表达与比较,为进一步建立HNE 机构的尺寸优化模型提供了便利。
再次,对各性能指标进行了归一化处理,定义了相应的子目标函数,建立了尺寸优化问题的数学模型,并提出了基于Centroidal Voronoi Tessellation(CVT) 的非线性最小二乘法对优化问题进行了解算。计算结果显示,CVT 的使用可以使参数初始值均匀覆盖整个参数空间,可在保持非线性最小二乘法原有优势的同时,提高算法的全局搜索能力,提供多组非劣解。然后,在执行机构的结构设计方面,提出了穿越式的驱动支链设计方案,减小了自身结构尺寸和安装占用空间,通过悬挂安装驱动支链保证了穿越式方案的实施,实践证明,机构的使用效果达到了设计目标。
最后,按照最优方案完成了执行机构的设计研制。

▲ 头颈部外骨骼系统原型样机
分析了6URHS 并联机构关节空间与任务空间之间的运动学关系;对螺母单独进行了动力学分析,推导了驱动支链的动力学方程,采用牛顿-欧拉法建立了部件级、细粒度的6URHS 并联机构动力学模型;采用Simulink 的Sim Mechanics 模块建立了6URHS 并联机构的虚拟样机,进行了开环动力学响应实验,实验结果显示数学模型与虚拟样机的动力学响应基本一致,数学模型的准确度与虚拟样机相仿。对6UPS 并联机构模型与6URHS 并联机构模型进行了能量转化分析,分析结果证明,考虑螺母的动力学特性,建立6URHS 并联机构的动力学模型具有较高的必要性。
针对含头盔显示器的动平台质量、重心位置等参数具有时变不确定性的特点,本书重点对非线性系统的在线辨识算法进行了研究,通过理论分析和文献资料阅读,归纳、总结了部分辨识方法的优、缺点;结合待辨识参数和执行机构动力学模型,给出了用于参数辨识的系统状态空间模型和观测函数;通过在线辨识仿真,对比分析了连续-离散扩展卡尔曼滤波(CDEKF) 算法和连续-离散无味卡尔曼滤波(CDSR-UKF) 算法的辨识速度、精度和稳定性,仿真结果显示CDSR-UKF 在这三方面均要优于CDEKF;采用CDSR-UKF 对HNE 的动平台参数进行了在线辨识实验,实验结果显示CDSR-UKF 能对参数的阶跃变化作出快速响应,辨识误差较小,且阶跃变化越小,CDSR-UKF 的响应速度和辨识精度就越高。
首先,分别设计基于并联机构机械跟踪测量和基于头颈部表面肌电信息测量的头部运动预测算法,通过典型的头部运动实验确定两种算法对于头部在不同运动速度及加速度下的适应性,并总结出头部运动预测的误差来源;针对两者的特点设计高效的融合算法,实现高精度、低时延的头部运动检测。
其次,通过理论分析和实验研究掌握头颈部表面肌电信息与头部运动之间的规律关系,确定影响头颈部肌电信号强弱的主要变量,建立三自由度的头颈部肌电力关系估计模型,并对模型参数进行优化估计研究。
再次,提出了一种基于HNE 系统动力学模型的无接触式人机交互力计算方法,该方法通过建立HNE 任务空间力与关节空间力的关系,采用间接的方式能实时根据关节空间力的反馈计算人机交互力。
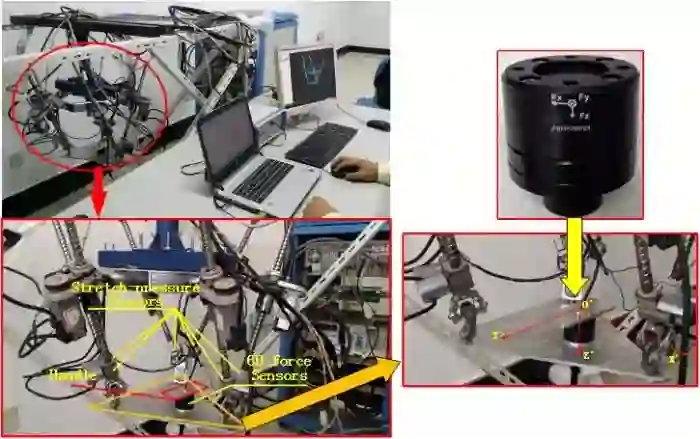
▲ 交互力计算准确度与精度验证实验环境
最后,针对系统的设计功能,提出了HNE 的主动柔顺控制策略(active compliance control strategy of HNE,ACCSH);并对策略涉及的内容—— 运动轨迹规划和控制器设计进行了研究。鉴于螺旋副存在自锁问题,根据六自由度并联机构任务空间与关节空间的运动学关系,结合6UPS 与6URHS 各自驱动支链的运动特点,提出了基于6UPS 并联机构驱动支链动力学模型和力传感器反馈数据的头部运动预测方法(即前文提及的机械跟踪测量方案),该方法通过对头部运动的预测实现了对执行机构动平台运动轨迹的规划;针对系统设计功能之二—— 减小头盔显示器与使用者头部间的广义接触力,本书基于系统动力学模型,设计了带有惯性项与非线性项补偿的控制器;通过仿真与实验,对主动柔顺控制策略用于HNE 控制的可行性与效果进行了验证,实验结果显示主动柔顺控制策略可以在实施精确位置跟踪的同时,有效地减小广义接触力,从而达到减小系统使用者工作负荷的系统设计目标。
按照功能划分,采用模块化的方法对系统软件架构进行了设计,基于Visual Studio 实现了指令模块等17 个功能模块,并根据任务需求将各模块有机结合,开发完成了系统管理软件、头部运动预测软件、在线辨识软件、系统控制软件以及动力学与运动学计算软件;基于C++Builder 开发了系统管理软件的可视化操作界面,基于OpenGL 设计了用于动态显示6URHS 并联机构运动状态的虚拟样机,方便了测试实验的开展,保证了实验的安全性;基于Windows XP 和RTX8.1 搭建了系统软件的运行环境,设计了服务器(Windows)-客户端(RTX) 的上、下位机控制架构,实现了HNE 的480Hz 的高频率实时控制。

▲ 实验环境
构建了头颈部外骨骼系统的原型样机,实现了系统硬件、软件的联合调试;采用仿真与实验相结合的方法,对HNE 的设计功能实施效果和系统动力学响应等特性进行了研究。建立了有、无金属物体干扰两种跟踪性能测试实验环境,采用惯性陀螺测量了动平台的位姿信息,对电磁跟踪器与HNE 的静、动态跟踪精确度、抗干扰能力和稳定性进行了对比,实验结果证实了HNE 的良好跟踪性能;提出了基于动力学模型与力反馈数据的广义接触力计算方法,为通过实验手段验证ACCSH 的实施效果提供了便利。参考了报告AGARDAR-144和MIL-STD-1558 中关于飞行模拟机动感模拟平台的运动测试规范,设计了HNE 运动特性极限等测试项目,完成了相关实验,并对实验结果进行了分析说明。
本文摘编自《面向虚拟现实仿真环境的头颈部外骨骼系统》(李鹏, 吴东苏著. 北京: 科学出版社, 2018.11)一书“前言”,有删减修改,文字插图来自该书正文。

ISBN 978-7-03-059348-1
责任编辑: 惠 雪 曾佳佳
本书针对现有高性能头盔显示器在虚拟现实仿真环境应用中存在的问题,提出一种六自由度的头颈部外骨骼系统,主要内容涉及虚拟现实环境下人体头部运动特性的计算、并联机构的尺寸优化设计和运动学与动力学分析、时变参数的实时辨识、基于机械测量和基于头颈部表面肌电信息测量的头部运动预测、人机交互力计算及其控制策略、系统软硬件设计与集成等。
(本期编辑:刘四旦)

一起阅读科学!
科学出版社│微信ID:sciencepress-cspm
专业品质 学术价值
原创好读 科学品味
更多好素材,期待你的来稿




