业界 | 美国国防部刚刚为微型机器人策划了一场“迷你奥运会”
大数据文摘出品
编译:halcyon
地震等自然灾害对建筑物、公用事业和基础设施造成广泛破坏,并威胁人类安全。能够顺利穿越瓦砾,迅速进入高度不稳定的区域,对于挽救生命或检测残骸中的危险非常重要。
类人机器人在某些特定的情况下特别有用,但有时候可能会被大材小用。比如,在实行搜救之前,为了先探索环境搜集数据,使用更小、更便宜、更专业的机器人会更有效率。

包括波士顿动力的网红机器人Atlas在内的类人机器人,主要目的都是进行搜救等具体操作👆
让救援人员与机器人合作评估高风险情景和环境,有助于提高成功搜索和恢复工作的效率,最大限度地减少对搜救人员的威胁。
近日,美国国防部高级研究计划局(DARPA)宣布了一个名为SHRIMP的新项目:短程独立的微型机器人平台( SHort-Range Independent Microrobotic Platforms,SHRIMP)。目标是“开发和演示用于自然和关键灾难场景的多功能微毫型机器人平台”。
为了使机器人既小巧又实用,SHRIMP将支持对最困难的部件进行基础研究,包括驱动器、移动系统和电源存储。
以下是来自DARPA的项目公告:
想象一个自然灾害的场景,例如地震,地震会对建筑物和结构设施、重要的公用设施和基础设施造成广泛的破坏,并威胁到人类的安全。能够在废墟中穿行并进入高度不稳定的地区,对于拯救生命或发现残骸中存在的其他危险是非常宝贵的。与机器人合作,评估高风险场景和环境,可以帮助增加成功搜索和恢复工作或其他关键任务的可能性,与此同时最小化对人类团队的威胁。
微电子机械系统(MEMS)、附加制造、压电驱动器和低功耗传感器的技术进步,使研究人员能够扩展到微毫米机器人领域。然而,由于技术萎缩所带来的技术障碍,这些平台缺乏熟练完成复杂任务的能力、导航和控制能力。
“无论是在自然灾害情况下,搜索和救援任务,危险环境,还是其他重要的救援情况,机器人都有可能提供急需的助手和支持,”微系统公司DARPA项目经理Ronald Polcawich博士说。技术办公室(MTO)。“但是,对于大型机器人平台而言,有许多环境无法访问。较小的机器人系统可以提供重要的帮助,但缩小这些平台需要显着推进底层技术。”
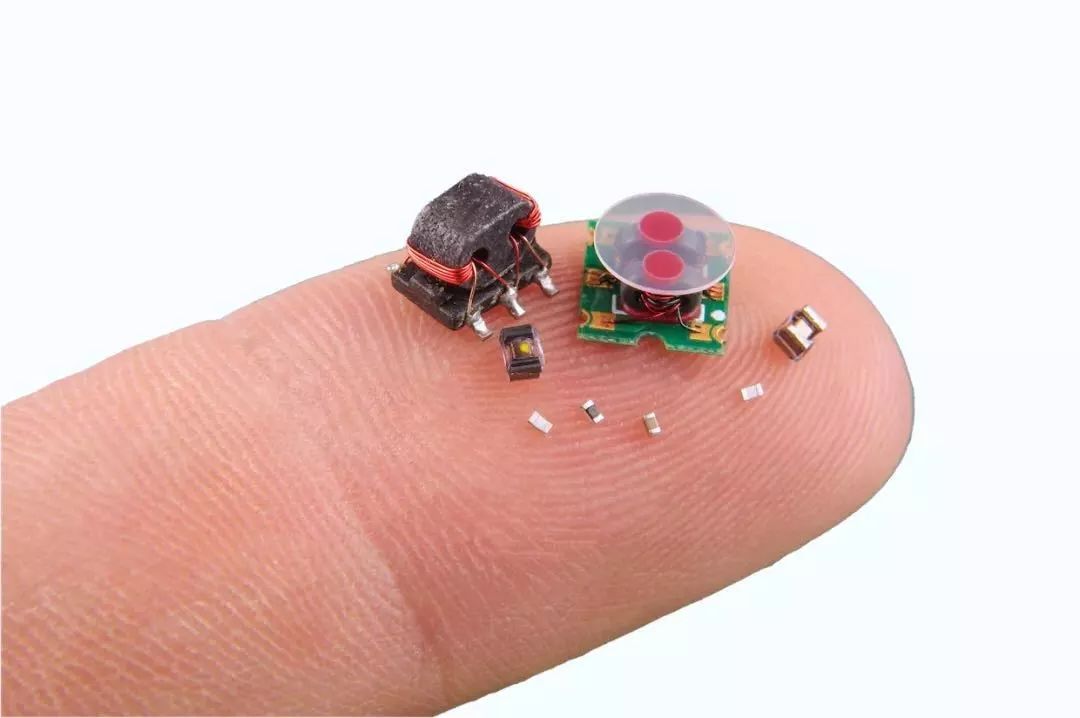
SHRIMP是美国国防部高级研究计划局(DARPA)为灾难恢复和高危环境开发的昆虫级机器人新项目👆
SHRIMP计划旨在推动多功能mm-to-cm规模机器人平台的开发。这项工作的关键是微致动器材料和节能电力系统的基础研究,用于受SWaP约束的微机器人系统。这些进步可以实现包括搜索和救援,救灾,危险环境检查,空气动力学平台的飞行控制,可操纵光学和假肢的应用。
“SWaP”一词的意思是“大小(size)、重量(weight)和功率(power)”,这个词总结了微型机器人开发所受到的一些限制。
最大的限制可能是功率问题,小型机器人不能在一两分钟内就耗尽能量,也不能依赖于外来能源,比如激光或磁铁。还需要考虑控制,真正的小微机器人几乎总会依赖板外处理器。
这些东西本质上限制了微型机器人在现实世界中的用处,这也是为什么DARPA希望直接用SHRIMP来解决这个问题。
有趣的是,SHRIMP项目希望用一次“奥运会”,检测这些小型机器人的性能:比如执行与可操作性、灵活性和操控性相关的“任务”。DARPA将把竞争分为两部分:一部分用于驱动器和电源,另一部分用于完整的机器人。
下面是驱动器和电源竞赛的项目;DARPA预计,该团队将开发重量不到1克的系统,并将其安装在一立方厘米的范围内。
跳高:微机器人驱动器-动力系统必须从静止的起始位置垂直地推动自身,以垂直方向的距离和生存性作为判断标准。预期结果:> 5厘米。
跳远:微型机器人电源驱动系统必须从静止的起始位置水平推进,距离仅以水平方向和生存能力为判断标准。预期结果:> 5厘米
举重:微型机器人电源驱动系统必须举起一个质量逐渐增大的物块,直到驱动系统再也无法举起重量。预期结果:> 10 g。
推铅球:微型机器人电源驱动系统必须水平地推进物块,以水平方向测量的距离作为判断标准。必须尝试1克和5克的质量。预期结果:>10cm @ 1g, >5cm @ 2g。
拔河:微型机器人电源驱动系统将连接到一个测压元件,以测量驱动器机构的阻挡力。预期结果:> 25 mN。
与整个机器人竞争的团队将有一组单独的事件,DARPA正在寻找在一个非常小、不到一立方厘米的体积和重量不到1克的小方块中实现很多的能力,DARPA希望看到“微电源,电源转换器,驱动机制和机械传动和结构元素,计算控制,传感器的稳定性和控制,以及任何必要的传感器和执行机构,以提高平台的可操作性和灵活性。
“机器人应该能够移动3分钟,运输成本低于50美元。”团队被允许为不同的事件开发不同的机器人,但是DARPA希望获胜的设计能够在至少四个事件中获胜。
堆石:每一次尝试,微型机器人必须在至少两层中移动,举起和堆叠重量(从0.5到2.0克不等),不需要人工交互。期望结果:2g, 2层。
障碍赛跑:比赛的队伍将被给予相对于起始地点的精确的地点和障碍类型(例如障碍,间隙,台阶等)。对于每一次尝试,微型机器人必须在没有人类交互的情况下完成,也无需在每个障碍之间重新充电。以清除障碍物的数量和总距离作为评判标准。预期结果:2个障碍,5米。
冬季两项:参赛队伍可以选择三种信标类型(温度、光线或声音),也可以选择使用所有的三种信标。对于每一次尝试,微型机器人必须穿越一系列信标路径点,而无需人工交互或重新充电。预期结果:2个信标,5m。
垂直提升:微型机器人将遍历两个表面,一个浅的坡度(10º),另用一把极度倾斜的坡度(80º)。所走过的垂直距离将作为评判标准。预期结果:10米 10°,1米 80°。
DARPA拥有3200万美元的资金,可以用于多个SHRIMP项目。论文摘要将于8月10日截止提交,提案将于9月26日截止提交,竞赛最早可能在明年3月举行。
提案提交地址:
https://www.darpa.mil/news-events/2018-07-17
【今日机器学习概念】
Have a Great Definition