欧洲两个研究团队开发出了让截肢者能感觉到并准确抓住物体的仿生手
来源:IEEE电气电子工程师学会
摘要:在过去十年中,研究人员在开发能给用户提供触觉和压力感的触觉传感器方面取得了很大进展。
如在你旁边正好有一个咖啡杯,那么拿起这个杯子,并注意下在不真正看着它的情况下做这件事有多么轻而易举。你会去感觉杯子把手的弯曲度、杯子的宽度、陶瓷的光滑度。你的手移到一个合适的位置,把杯子拿起来,感觉到其重量,然后将杯子放到嘴边。
现在,想象一下用不能给你什么感觉反馈的机器人手来做这件事。 你不会得到关于手指需要进行怎样的微小调整才能正确抓握住杯子的信息。它给你的感觉更像是在操作一根操纵杆,而不是一只手。
生物工程师们正在努力改进这一点。上周,他们取得了一些进展。在2月20日发表在Science Robotics期刊上的两篇论文中,两个研究小组介绍了在各自的项目中研发的为截肢者提供感觉反馈的仿生手。
在这两篇论文中,研究人员将电极植入截肢者的手臂残肢中,正中神经和尺神经上。然后,他们对这些神经进行精确的电刺激,这些神经将仿生手正在做什么的信息发送到用户的大脑。
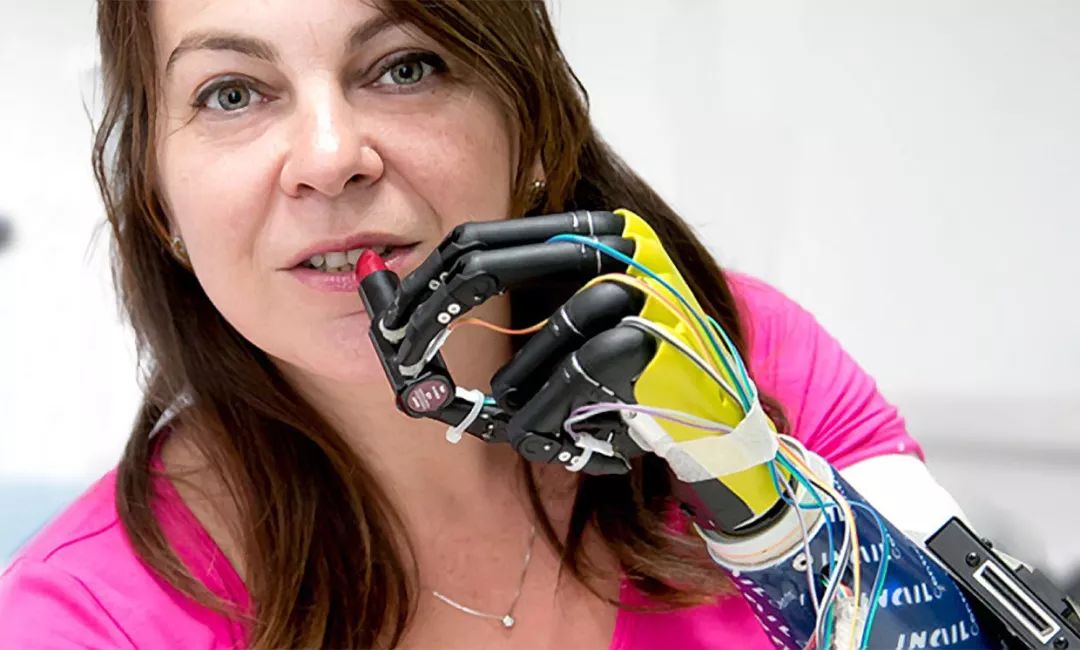
在一篇论文中,仿生手既提供了触觉,也提供了对手指相对位置的感觉,即本体感觉。使用机器人手的两名截肢者可以分辨出不同直径的四个圆柱体之间的差别,并能感觉到软硬物体之间的差别。瑞士洛桑联邦理工学院(EPFL)的Edoardo D 'Anna和Silvestro Micera领导了该研究。他们这篇论文的标题为“A closed-loop hand prosthesis with simultaneous intraneural tactile and position feedback”。
在另一篇论文中,仿生手提供了良好的抓握感,在物体从手中滑落时用户能够感觉到并迅速做出反应。意大利罗马生物医学大学(Università Campus BioMedico di Roma)的Loredana Zollo、Giovanni Di Pino和Eugenio Guglielmelli领导了该研究。他们这篇论文的标题为“Restoring tactile sensations via neural interfaces for real-time force-and-slippage closed-loop control of bionic hands”。
“感觉反馈是让假肢成为人体一部分的主要方式。”Zollo说。他是后一篇论文的作者之一。她说,大约30%的假肢使用者会抛弃假肢,是因为像是操作异物的感觉让他们感到沮丧。
在过去十年中,研究人员在开发能给用户提供触觉和压力感的触觉传感器方面取得了很大进展。但是,模仿手的强大感觉能力仍然难以实现。同时,将其整合到一只能够与身体实时通信的仿生手中,也是非常困难的。
此类设备必须首先提取用户的意图。这可以通过将电极连接到前臂或上臂的肌肉来实现。当截肢者做出不易察觉的动作来移动他的幻手时,某种算法会对产生的电信号进行解码,并告知仿生手他的意图是什么。
接下来,大脑需要得到关于事情进展情况的反馈。手接触到那物体了吗?需要如何调整才能完成任务?物体被触及后,它移动了吗?仿生手上的传感器接收到这些信息,然后算法对其进行编码。编码后的信息被转换成传递给神经系统并最终到达大脑的电刺激脉冲。
Zollo和她的同事们设计了一个系统,可以足够快地完成所有这些通信,使大脑能够感知物体从仿生手的抓握中滑落,并纠正手的位置。
为了实现这一目标,研究人员首先利用健康的志愿者来确定当被抓物体开始从手指间滑落时所产生的信号。然后,他们人工复制了这些信号,用在一名配备了仿生手的截肢志愿者身上。
视频来源:Università Campation BioMedico di Roma / Science Robotics / AAAS
在D'Anna等人的论文中,D’Anna和他的同事们所建立的系统,不仅将触觉反馈整合到仿生手中,而且还将本体感觉——感知手的相对位置和运动的能力——整合了进去。
D'Anna说,与触觉反馈相比,本体感觉的人工生成要复杂得多。相对于其他运动的运动涉及来自多个输入的多个信号。此外,负责这些信号的神经元通常位于运动神经元附近,这使得很难在不引起不必要的抽搐的情况下激活它们。
因此,D 'Anna和他的同事们通过一种叫做感觉替代的技术将本体感觉传递给截肢者。他们没有试图重建本体感觉,而是训练志愿者将本体感觉与一种单独的、更容易产生的信号联系起来。
例如,当志愿者用仿生手抓住一个圆柱体时,她会感到手腕上有一种单独的感觉,当她的手闭合时,这种感觉会增加。“我们用触觉代替本体感觉。”D'Anna说。
视频来源:EPFL / Science Robotics / AAAS
这两篇新论文使为截肢者提供各种感觉反馈的研究有了新的进展。这项技术让截肢者感觉到他的仿生手臂在空间中移动。
但还有很长的路要走。空间意识、本体感觉、抓握力:尽管这些进步令人印象深刻,但它们仅代表了人手能感知的感觉范围的一小部分。
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”